1. 研究背景与内容
光伏水泵技术作为光伏领域最有发展前景的技术之一,一直以来都是研究的热点,如何提高光伏水泵系统光电转化效率,也一直是光伏领域研究的重点。
要提高光伏水泵群控系统光电转化的效率,就必须保证在任何条件下,光伏阵列始终处于最大功率输出状态。光伏水泵系统中,当已运行的水泵处于饱和运行状态之后,何时开启一台新水泵才能使系统的效率最高是研究的关键 [1] [2] 。如果采用基于模型的阵列功率估算来寻找最优切换点,会过于依赖光伏阵列数学模型的精确度。环境的变化、光伏组件特性不一致等诸多因素都会影响到估算的准确性。为了更准确地获取阵列功率,本文提出了采用非均衡功率扰动搜索阵列的最大功率。本文研究的主要内容有:
1) 在光伏水泵并联系统中,采用非均衡功率扰动搜索光伏阵列的最大功率,获取更加准确的阵列功率。
2) 对已运行的水泵采用比例控制的基础上加入频率闭环,保证搜索过程中的稳定性。
2. 光伏水泵系统的非均衡功率搜索
2.1. 光伏水泵群控系统
光伏水泵群控系统由群控器、光伏阵列、变频器和光伏水泵四部分组成。其中,光伏阵列将太阳能转化为电能为光伏水泵提供运行所需的能量;每台变频器分别控制一台同一功率等级的光伏水泵;群控器作为群控系统的控制中枢与变频器实时通信,采集光伏水泵的运行参数,并向变频器发送指令,进而调度光伏水泵的运行,确保光伏水泵系统在当前光照条件下能够高效地运行 [3] [4] [5] [6] 。
2.2. 非均衡功率的扰动搜索法
在光伏水泵群控系统中,各台水泵的输出功率是相同的,但当已运行的水泵都处于饱和状态后,何时开启一台新的水泵是研究的重点,本文采用非均衡功率的扰动搜索寻找光伏水泵的最优投切点。
该方法在水泵运行达到饱和后,保持已运行水泵频率不变,启动一台未运行的水泵作为功率搜索水泵,功率搜索水泵仅起到搜索阵列最大功率的作用。功率搜索水泵与饱和水泵的输出功率不同,因此称为非均衡扰动搜索。当阵列功率增加到系统的最优切换点时,此时功率搜索水泵与饱和水泵运行于相同状态下,即可达到系统的效率最优。
2.3. 空闲水泵的扰动搜索
如图1所示,假设系统存在3组水泵,水泵1、2处于运行状态,水泵3处于停机状态。各水泵采用
比例控制,水泵1、2的电压给定相等。当阵列功率还不足以使水泵1、2保持满载运行时,由群控器下发水泵1、2的电压给定值调节阵列电压并搜索最大功率点。
如图2所示,随着阵列功率逐渐增加,水泵转速达到饱和,阵列工作点逐渐偏离了最大功率点,由A变为B。由于此时水泵已经处于饱和状态,系统无法搜索阵列的最大功率。因此开启水泵3,搜索阵列最大功率点,保持已运行的水泵1、2频率不变。搜索过程中,阵列工作点逐渐由B向最大功率点C移动。当阵列的最大功率逐渐增大到系统的最优切换点,即同时运行三台水泵的打水量高于两台水泵饱和运行时。此时水泵3完全投入运行,改变其电压给定值,使各水泵频率相等,运行于最大功率点。
2台水泵转速达到饱和,若此时阵列功率开始降低,两台水泵的输出功率逐渐降低,直到阵列功率降至运行一台水泵与两台的最优切换点,此时单独运行一台水泵的打水量要高于同时运行两台,则关停
图1. 群控系统水泵运行状态
图2. 阵列与水泵状态
水泵2,由水泵1单独运行。
图3所示为最大功率搜索过程中的仿真波形,图中水泵1为已运行水泵,水泵2为功率搜索水泵,阵列的最大功率点电压为400 V。图3(a)为水泵1达到50 Hz后,启动水泵2并搜索阵列最大功率的过程。可以看出,先启动水泵1,频率达到50 Hz稳定后水泵1到达饱和,启动水泵2,改变水泵2的电压给定,开始最大功率点的搜索。图3(b)为水泵2搜索过程中阵列电压的变化,可以看出随着水泵2的搜索,阵列电压逐渐向最大功率点靠近,最后达到稳定。
 (a)
(a) (b)
(b)
Figure 3. Unbalance power disturbing MPPT simulation waveforms
图3. 非均衡功率扰动搜索的仿真波形

Figure 4. Algorithm when tracking MPP
图4. 搜索过程中水泵控制算法
 (a)
(a) 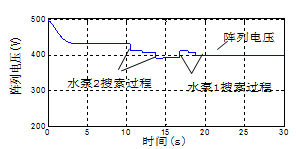 (b)
(b)
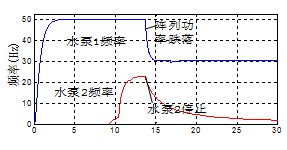
Figure 5. Simulation waveforms after sudden drop in array power
图5. 搜索过程中水泵控制算法
3. 搜索过程中的稳定性问题
光伏水泵群控系统在正常的运行过程中,如果受外界因素的影响,可能会出现阵列功率大幅度跌落的情况,此时阵列电压将无法保持稳定,如果处理不当,对正在运行的水泵以及整个系统都会产生很大的影响 [7] [8] [9] [10] 。
为了保持搜索过程中系统的稳定,防止阵列功率大幅跌落导致系统崩溃,我们在比例控制的基础上加入频率闭环,如图4所示。由于频率闭环的作用,消除了功率搜索过程电压波动对水泵输出频率造成的影响。搜索过程中即使阵列功率有较大幅度跌落,系统仍可保持稳定,同时频率闭环退出工作,重新搜索阵列最大功率点。
图5为搜索过程中,阵列功率突然跌落后的仿真波形。从图5(a)中可以看出,由于阵列功率跌落,正在进行功率搜索的水泵2被关停,水泵1从饱和状态跌落,此时由水泵1重新进行最大功率搜索,寻找新的最大功率点。图5(b)为阵列功率跌落前后的阵列电压变化,从图中可以看出,跌落之前水泵2正在进行最大功率点的搜索,由于阵列功率的突然跌落,水泵2停止运行,最大功率搜索停止,但当水泵1开始搜索之后,最大功率搜索重新开始,逐渐向最大功率电靠近,直至达到稳定。
从图5中可以看出,由于水泵采用了比例控制,当功率大幅跌落之后,虽然对整个系统会造成一定的影响,但系统仍然能迅速反应,保持稳定,不会出现系统崩溃的情况,提高了系统的稳定性。
4. 结论
本文采用非均衡阵列最大功率搜索的方法,搜索过程中既不会影响已处在饱和运行状态下的其他水泵,又能够更加准确的找到系统的最优切换点,提高了系统的效率。同时在比例控制的基础上加入频率闭环,降低了系统因外界环境变化崩溃的可能,提高了系统的稳定性,适合在实际工程中使用。