1. 引言
为了减少一次性能源的利用、缓解环境污染问题,各国专家学者大力开发和使用新能源技术、分布式电源(Distributed Generation, DG)和电动汽车(Electric Vehicle, EV)接入配电网,改变了传统电网发电和用电模式,是国内外研究的热点 [1] [2] [3] 。
目前已经有很多学者对DG与EV接入配电网所产生的影响分别进行了研究。针对DG接入配电网造成系统电压波动等影响 [4] [5] 对配电网进行优化控制,主要在含DG配电网规划方面对DG选址定容进行优化 [6] [7] ,以及系统网损及电压稳定性方面对DG无功出力进行优化 [8] 。在EV接入配电网时针对其充放电随机特性,研究不同充电场合及不同类型充电汽车的充放电特性及功率需求 [9] ,建立配电网经济调度模型并求解 [10] 。对于DG和EV同时接入配电网的情况,文献 [11] 建立了配电网最优潮流模型,对含DG与EV的配电系统实行潮流最优化;文献 [12] 考虑双馈风力发电机组和电动汽车同时接入配电网的情况,建立机会约束模型求解最小网损;文献 [13] 在多种类型的DG和EV接入情况下,建立配电网无功优化的二阶锥规划模型,并对其进行求解,得出良好的计算效率。
在考虑含DG与EV配电网模型中,文献 [14] 采用改进果蝇优算法对模型进行求解,没有很好的解决DG与EV随机性问题,文献 [15] 建立锥规划模型求解配电网最优经济运行问题,运用内点法进行求解,但内点法初始点必须可行等问题限制了算法的高效、快速寻优性能。
本文针对含不确定性DG与EV的配电网,对随机因子进行模糊化处理,建立二阶锥规划模型,并用全牛顿步不可行内点法进行求解。最后对IEEE33节点系统进行仿真,并对比其他模型及锥规划其他算法,得出本文模型计算法对求解含DG与EV的配电网模型具有高效、快速、稳定的特点。
2. 源荷功率的随机模型及其模糊表式
2.1. 分布式电源输出功率的随机模型
1) 风力发电
风速通常用威布尔分布模型来表达,其概率密度函数表达式为:
(1)
式中,c表示尺度参数;k表示形状参数。
风电机组有功功率输出与风速的关系式表达为如下的分段函数:
(2)
式中,Pw为风力发电机的输出功率;Pe为风力发电机额定功率;vr为风力发电机组的额定风速;vci、vco分别为风力发电机组切入风速和切出风速;vaw为风力发电机组实际风速值。
2) 光伏发电
太阳光照强度可以利用Beta分布函数进行描述:
(3)
式中,s为太阳光照强度,α、β为Beta分布的形状参数,与一定时间段内晴空指数的平均值μ和标准差σ的关系如下:
(4)
(5)
利用Beta分布产生不同时段内太阳光照强度后可计算处不同时间段光伏电池出力情况,可近似认为光伏出力与光照强度成正比。
2.2. 电动汽车充电功率的随机模型
电动汽车的充电行为通常由四个参数表示,即充电起始时刻T0,充电时长Tc、充电量Sc和单位充电功率Pc(t)。
车辆开始充电时刻满足正态分布,其概率密度函数为:
(6)
电动汽车充电时长的函数表达式为:
(7)
式中,S为电池容量;d为日行驶里程;W每公里耗电量。
在一定充电电流倍率下,充电功率与电池容量有关,单台电动汽车充电功率为:
(8)
式中,
为充电概率函数;Pc为恒定充电功率;
每小时N台电动汽车总充电功率可表示为:
(9)
2.3. 源荷功率的模糊表式
考虑到DG与EV具有的间歇性和波动性对配电系统造成很大的影响,引入模糊理论,将间歇式电源出力和负荷用模糊参数表示,并对DG与EV组成的随机参量采用模糊随机规划进行处理。
本文模糊变量采用梯形函数来表示:
(10)
式中:μ(Pw)为风电场在对应时段的有功出力;Pw1-Pw4为隶属度参数,可由平均出力Pav确定;下式中ωi(i = 1, 2, 3, 4)为隶属度参数。
(11)
梯形隶属度函数表达式(11)相应的隶属度函数图如图1所示。
对DG与EV的出力和充电功率预测分别用梯形模糊函数表达模糊隶属度参数见表1。

Figure 1. Membership function of active power output of wind farm
图1. 风电场有功出力隶属函数

Table 1. Trapezoidal fuzzy parameters
表1. 隶属度参数
3. 源荷协同运行多目标优化的CCSOCP模型
3.1. 机会约束规划
线性规划、非线性规划等通常是用来解决确定性规划问题的,对于很多不确定性规划问题,通常用机会约束规划来解决。机会约束规划是指在一定概率意义下使目标函数达到最优,即在一定程度上决策满足约束条件的概率不小于某一置信水平。针对风机发电功率和光伏发电功率的不确定特征采用机会约束对含DG的目标函数和约束条件进行规划。机会约束规划的数学表达式的常见形式为:
(12)
式中,x为决策变量;ε为随机变量;
为目标函数;α、β为机会约束条件的置信水平。
3.2. 二阶锥规划
二阶锥规划算法是线性空间中凸锥上的数学规划,在求解大规模非线性规划问题上具有求解速度快,寻优能力强等特点,其标准数学表达式为:
(13)
式中,x为n维决策变量;b、c和A为系数常量;cTx是决策变量x的线性函数;K为有限个非空尖凸锥的笛卡尔乘积。
3.3. 源荷协同运行多目标优化的CCSOCP模型
3.3.1. 多目标函数
针对DG和EV接入配电网给系统带来的一定影响,本文采用多目标控制策略研究含DG与EV的配电网运行优化,第一个目标函数为最小化分布式电源运行成本,目标函数如下:
(14)
式中:PDGi(t)为t时刻第i个分布式电源的有功出力;K为运行维护系数。
为了提高含DG与EV的配电网电能质量,设置优化模型的第二个目标函数为最小化各节点电压偏差,目标函数如下:
(15)
式中:Ui为节点电压幅值;Ui e为额定电压幅值;Ui,max、Ui,min分别为节点电压上下限。
设置优化模型的第三个目标为最小化配电网有功网损,目标函数如下:
(16)
式中:Pi,t为i节点在t时刻内的注入功率;取时长为Δt = 1 h,T = 24。
3.3.2. 约束条件
1) 系统潮流约束
(17)
式中:Gii,Gij,Bii,Bij分别为节点导纳矩阵中自电导、互电导、自电纳、互电纳;Vi,Vj,δij分别节点i,j的电压幅值和相角差;Pi,Qi分别为节点i注入有功和无功功率之和;PLDi、QLDi分别为负荷节点i注入有功和无功功率;PGi、QGi、分别为发电机节点i有功和无功出力;Qci为并联无功补偿器的无功容量。
2) 状态变量约束
各节点电压约束和支路电流约束如下:
(18)
(19)
3) 控制变量约束
(20)
式中:SDGi,max分别为节点i接入光伏发电和风力发电出力最大值;PEV,max为EV充电功率最大值。
4. 优化模型的等价二阶锥转化
对配电网优化模型转化为二阶锥规划模型,首先对模型中非线性约束条件寻找替代变量进行锥松弛转化为线性约束,然后将约束条件的非凸非线性约束条件转化为旋转锥约束,最后整理目标函数和约束条件。
4.1. 标准锥优化形式
二阶锥规划的标准形式为:
(21)
式中:
,
,
为已知的量,
为ni维的二阶锥。
4.2. 约束条件锥转化
为了将潮流方程转化为线性约束条件,引入如下变量:
(22)
将上式带入到潮流方程中得到转化后的潮流约束、节点电压约束和线路电流约束方程如下:
(23)
将式(12)进行锥松弛为:
(24)
根据分布式电源容量限制将容量约束转化为旋转锥约束,如下:
(25)
针对DG与EV出力的不确定性,采用机会约束对状态变量进行含置信区间的约束,表达式如下:
(26)
5. 全牛顿步不可行内点算法
全牛顿步不可行内点算法不需要初始点严格可行,对原来规划问题不可行,对扰动问题却保持始终可行。通过限制可行性残量,使得原始对偶残量和对偶间隙按照同等速率减少 [16] 。全牛顿步不需要对步长进行线搜索,搜索方向全部采用全牛顿步,全牛顿步分别为可行步和中心步。其基本思路为在二阶锥规划最优条件中增加扰动条件,出现扰动情况下的原始问题及其对偶问题描述如下:
(27)
(28)
式中:初始点为
,可行性残量:
,
,
,在最优解条件下
增加扰动变量为:
(29)
5.1. 可行步的确定
可行步的目的是确定搜索方向,使新得到的迭代点满足二阶锥规划规划及原始约束方程。
在初始点
下进行迭代,更新迭代点为:
且满足方程:
(30)
搜索方向
由下列方程确定:
(31)
5.2. 中心步的确定
中心步的目的是寻找搜索方向
使其迭代朝向中心点更快速度逼近最优解。满足二阶锥规划和对偶问题的约束方程:
(32)
该算法的一次主迭代包括一次可行步,更新和若干次中心步更新。其算法步骤如下图2所示。
6. 算例分析
本文以IEEE33节点系统为例进行仿真,系统基准电压为12.66 kV,基准功率为100 MVA,总负荷为3.715 MW,系统图如下图3所示。
在本文仿真中以小时为时间段,对一天中的DG出力和EV充电功率特性进曲线行分析。在IEEE33节点系统上接入两个风电场,其机组参数和负荷预测见文献 [17] ;接入一个光伏发电站,其发电站参数和功率预测见文献 [18] 。
在考虑接入配电网的电动车充电功率模型时,只考虑居民区电动汽车充电站,汽车数量为500辆,平均电池容量为2.5 kWh,充电功率为3.6 kW,根据蒙特卡洛模型模拟出居民区充电站充电负荷功率如图4所示。
对比含DG与EV的配电网优化方法得出的节点电压标幺值如图5所示,其中模型0为原始数据,模型1、模型2、模型3分别对应粒子群算法、锥规划原始对偶内点法和全牛顿步不可行内点法。可见,采用全牛顿步不可行内点法可以更好的电压质量。
由图4可知,含DG和EV的配电网比单独DG或者EV接入更有利于电压稳定性和电网电能质量的提高。
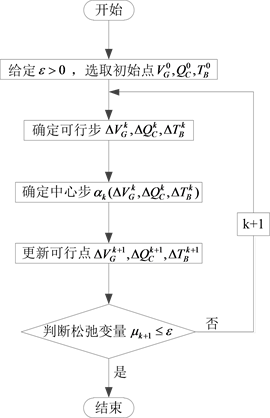
Figure 2. All Newton step infeasible interior point algorithm steps
图2. 全牛顿步不可行内点算法步骤

Figure 3. IEEE33 node network structure
图3. IEEE33节点网络结构图
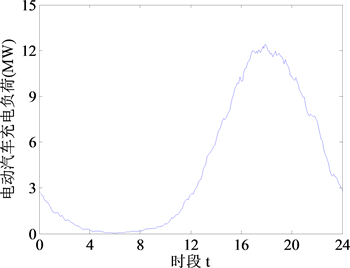
Figure 4. Charging load curves of residential charging stations
图4. 居民区充电站负荷曲线
7. 结论
本文考虑了多类型的DG出力的随机性和EV充电的不确定性,对DG出力和EV充电功率进行了模糊化处理,建立了含DG与EV的配电网多目标优化模型,并通过对模型进行锥转化和实例仿真得出以下结论:
① 针对不同的DG和EV建立相应模型,考虑多种影响因素对DG和EV造成的影响,精确描述DG出力状态和EV充电状态,并用模糊函数表达。
② 建立二阶锥规划模型对含DG与EV的配电网进行描述,并根据约束条件求解相应的目标函数,本文对不确定因素进行机会约束规划,并对比粒子群及其他锥规划内点法得出本文方法求解更快、更稳定,收敛性更好。
③ 在DG与EV的联合有功协调下,实现电网运行经济最优、有功网损最小以及节点电压偏差值最小。
基金项目
国家自然科学基金项目(50767001);广东省公益研究与能力建设专项资金项目(2014A010106026);中国南方电网有限责任公司科技项目(031900KK52150047)。