1. 引言
为了缓解能源危机,分布式电源(Distributed Generation, DG)日益成为各国专家学者研究的重点 [1] ,传统供电形式无论在经济或效率等方面都无法满足现在高环保高质量的生活方式,DG的接入给电力系统带来节能、稳定以及安全的电能质量的同时也带来很多问题 [2] 。随着大量不确定DG接入配电网,会引发配电网电压越限、潮流分布不均衡以及电能质量不达标等多种电力系统稳定问题,这使得优化配电网显得尤为重要,其中一个问题为优化电压稳定,优化配电网电压稳定其本质上是一个同时包含连续、离散决策变量的最优无功协调问题 [3] 。
多样化随机DG的接入会引发配电网电压越限、潮流分布不均衡以及电能质量不达标等多种电力系统稳定问题 [4] ,使得配电系统的控制和管理变得更加复杂和困难。其中一个问题是在配电网中各节点电压维持不越界的范围内,如何调配DG接入配电网的有功功率和无功功率使得电网系统网损降到最低 [5] [6] 。这个问题是多目标协调的非线性优化问题,在确定目标函数的基础上,同时兼顾电网系统潮流平衡方程以及电压及相角不越限的范围不等式 [7] [8] 。
内点法是目前解决优化问题的先进方法 [9] [10] [11] ,它是在解决线性规划问题的常规算法单纯形法的基础上提出的一种更复杂、更快速、更精确的计算线性规划问题的方法。文献 [12] 从DG接入配电网容量限制方面,提出了在DG最大接入量不能超过负荷25%的前提下,通过计算各节点对网损的敏感度分析配电网DG规划。文献 [13] 针对多类型的DG接入配电网,对配电网进行重构,使配电网到达无功最优。
针对上述问题,本文在原对偶内点法的基础上对间歇性分布式电源接入配电网进行合理优化,在IEEE14节点基础上进行实例分析,通过比较,证明了原对偶内点法在协调网络损耗、电压平稳和电能质量提高等方面具有较好的效果。
2. 原对偶内点算法
原对偶内点算法 [14] 是在解决线性规划问题的常规算法基础上提出的一种更复杂、更快速、更精确的计算线性规划问题的方法。该算法从对于扰动问题严格可行并足够靠近其中心路径的迭代点出发,经过一次参数更新和一次主迭代使残量和对偶间隙更趋近与零,最终使迭代点趋近于最优解。
2.1. 原始对偶内点法基本原理
对偶问题数学模型可以描述如下:
(1)
式中,f(x)、h(x)、g(x)分别为目标函数、等式约束条件和不等式约束条件。
引入松弛变量l、u,不等式约束条件为:
(2)
目标函数中引入拉格朗日因子y、z、w及障碍常数m,目标函数变为障碍函数:
(3)
2.2. 迭代步长的确定
在状态变量和控制变量满足可行性的基础上,步长尽可能大,使其快速逼近可行域内最优解。
(4)
式中,αp、αq分别为原变量和对偶变量的迭代步长。
2.3. 障碍常数的确定
障碍常数的选取对收敛性能是至关重要的,障碍常数与对偶间隙成正比关系,在系统优化迭代过程中,对偶间隙不断减少,当对偶间隙等于零时,原始问题和对偶问题达到最优解,非线性规划中常用补偿间隙近似代替对偶间隙,补偿间隙为:
(5)
式中,障碍常数通常设为
;σ为中心数通常取值为0.01~0.2;r为不等式约束个数。
3. 配电网无功优化的锥规划模型
本文以系统网损最小为优化目标,选用控制变量为DG无功出力,状态变量为节点电压幅值和相角,以潮流方程为等式约束条件,以DG出力限制、节点电压不越限等为不等式约束条件,在满足约束条件的情况下运用原始对偶内点法计算无功优化问题。
3.1. 锥规划
线性规划及其对偶问题数学模型描述如下:
(6)
与式(2-1)相对应的对偶问题描述如式(2-2):
(7)
对于式(2-1)和式(2-2)描述的线性规划问题,其约束条件为:
(8)
出现扰动情况下的线性规划问题及其对偶问题描述如下:
(9)
(10)
式中,初始点为(x0,y0,s0),
、
为可行性残量;
,
,
。
此时的约束条件方程变为如下描述:
(11)
3.2. 无功优化数学模型
本文以网损最小为优化目标构建如下无功优化数学模型:
(12)
式中,Gij和Bij分别为节点导纳矩阵的元素Yij的实部和虚部;Pij和Qij分别为节点的负荷有功和无功功率;PGi和QGi为分布式电源的有功和无功出力;Vi为节点i的电压幅值;θij为节点i的电压相角;
3.3. 等式约束的雅可比矩阵
原始变量和对偶变量的修正量求解需正确写出等式约束的雅可比矩阵,不等式约束的雅可比矩阵和海森矩阵。等式约束的雅可比矩阵为等式对变量的偏导,即:
(13)
式中,
、
为系统潮流有功等式对DG有功出力的偏导和无功等式对系统无功补偿容量的偏导,N、H、L、K分别为潮流有功等式对电压幅值、相角偏导以及无功等式对电压幅值和相角偏导,其中H、L、K可由N为例同理推导得出。
(14)
(15)
(16)
由等式约束条件得出的雅可比矩阵同理可得到不等式雅可比矩阵。
3.4. 不等式约束的海森矩阵
不等式约束的海森矩阵是由不等式对变量的二阶偏导得出,公式如下:
(17)
3.5. 原对偶内点法无功优化算法步骤
内点法基本计算步骤为:
1) 设置初值(可行的初始点,惩罚因子初始值,缩减系数,收敛精度,设置初始迭代次数k = 0);
2) 构造惩罚函数,求解目标函数极值;
3) 判断所得函数极值是否满足收敛条件,若满足则迭代终止,若不满足则缩小惩罚因子,当前极值为下次迭代初始值,直至满足收敛条件。
求解步骤如图1所示。
4. 算例分析
以IEEE14节点配电系统为例,系统中基准电压为10 kV,基准功率为100 MVA,在节点1.2.3.6.8处接入发电机,无功补偿点为节点9,以及支路4-7,4-9,5-6处接可调变压器。以DG接入网损最小化为目标函数,在各节点电压及发电机有功功率和无功功率不越限情况下,使网损达到最小化。14节点配电系统如图2所示。
设置的松弛变量l = 0.8,u = 1.1,拉格朗日因子z = 1,w = −1.5,y = 1,计算得出各节点电压如表1所示。
由此可以得出优化后各节点电压变化范围较小,且经过计算得出优化前网络损耗为0.1364 kW,内点法优化后损耗为0.1128 kW,遗传算法优化后损耗为0.7342 kW。
补偿间隙Gap随迭代次数的增加而减小,仿真结果如图3所示。
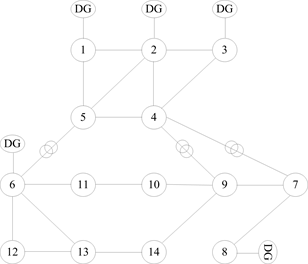
Figure 2. IEEE14 distribution system
图2. IEEE14配电系统
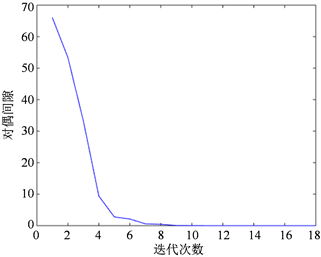
Figure 3. The compensation Gap varies with the number of iterations
图3. 补偿间隙随迭代次数变化曲线

Table 1. Optimization results of system state variables
表1. 系统状态变量优化结果
5. 总结
DG出力的不确定性造成电网系统电压不稳定以及损耗值增大等问题,合理的调节配电网无功可以有效减少系统有功损耗、增强系统电能稳定。通过接入IEEE14节点系统比,得出原对偶内点法是可行的且具有较高的计算速度和精确度。
基金项目
国家自然科学基金项目(50767001);广东省公益研究与能力建设专项资金项目(2014A010106026);中国南方电网有限责任公司科技项目(031900KK52150047)。