1. 引言
近年来,随着非接触式测量技术的飞速发展,数字航空摄影及激光雷达测量技术成为现代测绘技术中一种快速有效采集三维空间信息的高新技术,在行业中得到了越来越广泛的应用。其中,摄影测量先后经历了模拟摄影测量、解析摄影测量及数字摄影测量三个阶段,特别是无人机摄影测量技术的发展,加速了摄影测量技术的推广应用,但摄影测量是依据光学被动式测量,受环境天气等因素的限制,特别是在植被茂盛区域也无法获取真实地表的高精度三维信息。而激光雷达技术是近十年来摄影测量与遥感领域革命性的成就之一,可直接快速获取三维空间数据,数据处理自动化程度高,数据生产周期短、具有不接触性、高密度、高精度(尤其是高程精度)、作业成本低等特点。它采用主动性工作方式,通过自身发射的激光脉冲反射来获取目标信息,不受天气条件限制,能全天候实施对地观测,机载激光雷达传感器发射的激光脉冲对植被也具有一定的穿透能力,这是传统航空摄影测量技术所无法比拟的 [1] ,不过在生成数字线划图方面又不如航空摄影测量那么便利直观。
综上考虑,在一些大面积洲滩、植被高覆盖、精度要求较高的地形测量项目中,采用单一的一种技术手段难以满足测图要求。特别是随着集成技术的高速发展,在一些复杂区域可采用多种技术相结合的作业方式,本文结合长江干流1:10,000河道地形测量项目,介绍了航空摄影与机载激光雷达相结合的技术手段,并验证了地形图成果的地物平面精度及地形的高程精度,对该作业方式的推广具有现实意义。
2. 航摄与机载激光雷达系统
2.1. 系统组成
航空摄影与机载激光雷达系统将航空摄影仪、激光雷达系统、惯性测量装置(IMU)、全球卫星定位系统(GNSS)和计算机控制系统集成于一体 [2] 。外业数据采集时,固定安装在飞行器上面,通过卷尺或全站仪量测及后期飞行场校正,确定多传感器之间位置和角度关系。数据采集时利用航空摄影测量和激光测距原理,快速获取大面积高时空分辨率的影像数据和地表三维数据。像片和激光点云数据经过后期相关软件的处理可以生成高精度的数字正射影像图DOM、数字高程模型DEM、数字线划图DLG等产品。这种相结合的作业方式使航测制图如生成等高线和地物要素的提取更加便捷,具有传统摄影测量和地面常规测量技术无法取代的优越性。
2.2. 系统的工作流程
航空摄影与机载激光雷达系统测量工作主要分为3个方面:首先是航摄准备阶段,主要包括测区的踏勘、空域申请、航线的设计、测区控制及检校场的布设等工作。其中,检校场的选择布设尤为重要,要根据现场踏勘实际情况及飞行线路设计原则进行航线设计。因为航空摄影与机载激光雷达系统由多个独立的采样单元(GNSS接收机、IMU、激光测距系统、影像系统)组成,而多传感器之间存在偏心量误差、安置角误差和时间同步误差等,这些误差都需要通过飞行数据采集来检校完成;其次是开展航摄及机载激光雷达数据的外业采集工作;最后进行影像及雷达点云数据的后处理工作。机载激光雷达可快速获得点云数据,但其获取的数据具有离散、分布不均匀等特点,同时数据的采集具有盲目性,激光反射的信号可能来自于裸露地表、建筑物和植被,还有可能来自天空飞行的物体以及由于其它误差导致的精度极低的无意义数据,正是由于数据环境的复杂性,这给计算机自动提取地面点生成DEM带来的困难,因此从原始点云中剔除植被、房屋等非地面点,得到地面点就尤为重要。
在数字产品生成阶段,我们利用POS(IMU/GNSS)数据及航空摄影像片完成DOM的制作,DEM的制作则采用精度更高的机载激光雷达点云数据生成。具体工作流程见图1。
3. 长江水道地形测量中的应用
3.1. 项目概况
长江河道地形测量是一项基础性工作,自1950年以来基本按照每5年开展一次,为流域防洪减灾、综合治理和各项行政管理等提供了强有力的基础支撑。随着三峡工程蓄水运用及上游干支流水库陆续兴建,掌握长江中下游干流河道地形资料对研究河势清水冲刷变化,保障长江中下游水安全尤显重要。
本次测量区域为长江干流监利至岳阳城陵矶河段,干流总长90余公里,陆域面积约110 km2,测区成带状分布。该河段陆域及边滩较为宽阔,且绝大部分区域为密集芦苇及防浪林区;测区内有乌龟洲、后洲、七姓洲、八姓洲、泥潭洲等洲滩,且面积较大。茂密芦苇、树林及沟壑严重影响测量通视、通行及GNSS信号接收,给常规手段测量工作带来诸多困难。沿江两岸有监利、岳阳港口和重要工商业城市,地形较复杂。测区河道为土砂双层结构,且砂层厚度达30 m以上,部分边滩和洲滩则为纯砂质单层结构,岸线极不稳定,河床横向摆动大且频繁,是长江中下游河道变化极其剧烈的一段。出于以上测区特点要求外业数据采集工作需短期内完成,对地形图的精度特别是高程精度要求也比较严格。具体测区范围及摄影分区见图2。
3.2. 项目实施情况
项目采用的飞行器为动力三角翼、采用的仪器设备为国产LC-3500机载三维成像激光扫描仪、SWDC双拼数字航测相机、加拿大Applanix公司生产的高精度机载传感器定位定姿系统POS AV510 (输出频率200 Hz)及天宝公司双频GNSS接收机。本次作业共分为5个区域,设计飞行高度为1 200 m,地面分辨率优于0.2 m;航线按航向重叠度最低不低于56%,旁向重叠度最低不低于20%布设,共构架航线43条,进行了10个架次的飞行作业任务,航飞总长度692 km,像片总数为2 164张。项目作业天数仅为10天,这是常规测量方法无法比拟的,大大缩短作业周期,最大可能的保留了地形图的现时性、时效性及专用性。
3.3. 数据处理
航空摄影与机载激光雷达系统数据处理分为数据预处理和数据后处理两个阶段,具体过程见图3。
3.3.1. 数据预处理
数据预处理主要包括:
(1) 对原始数据进行解码,获取GNSS数据、IMU数据、激光测距数据等。
(2) 将同一架次的POS数据、地面基站观测数据、飞行记录数据、基站控制点数据和激光测距数据等进行整理,联合机载GNSS观测数据按照后处理精密动态测量模式进行处理,获取飞行过程中各时刻GNSS天线的基准坐标,从而生成满足要求的三维点云数据。
(3) 将原始数码影像数据格式RAW转换为TIFF格式数据。依据相机检校文件,进行畸变改正,同时对影
像进行匀光匀色处理,基于POS数据和影像数据,进行影像外方位元素解算。
3.3.2. 数据后处理
(1) 点云数据处理
对预处理后得到的地面点云数据进行进一步的处理,主要包括:噪点去除、点云数据分类和滤波、生成DEM和等高线。点云数据包括地面点、植被点、地物点等,只有将地面点精确过滤出来才能得到高精度的DEM。点云

Figure 2. Area of survey and aerial photography partition
图2. 测区范围及摄影分区
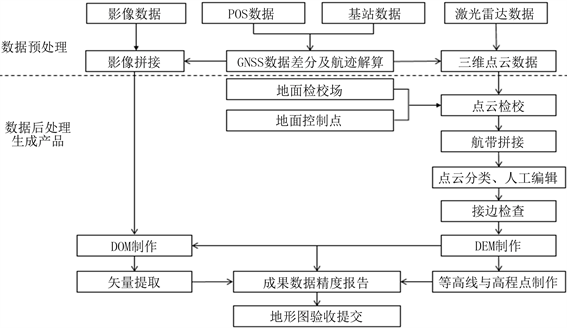
Figure 3. Processing flow of aerial photography and airborne lidar data
图3. 航空摄影与机载激光雷达数据的处理流程
过滤一般分为自动过滤和手工过滤,点云自动过滤是选用合适的滤波算法将点云中的噪声点剔除,把地面点分类出来,对于部分自动滤波没有滤掉的部分粗差和地形复杂区域则需进行人工干预过滤。利用过滤后的激光点云数据构建TIN,后生成DEM,将整个测区接边后需平滑过滤,避免存在凸起等问题,从而形成最终的DEM产品。
(2) 数字正射影像图DOM制作
通过像片的外方位元素和DEM数据对航摄像片进行正射纠正、影像匀光匀色、影像镶嵌,根据图幅范围进行裁切,生产出符合精度标准的DOM产品。数字正射影像图应影像清晰、反差适中、色彩及色调均匀,影像无模糊等现象,地物地貌应真实,无扭曲变形、噪声、云影等缺陷,影像数据具有连续、无缝和视觉一致性。
(3) 地形图要素的采集与编辑
基于激光点云生成的高精度的DEM和航摄像片制作的高分辨率DOM可以生产出高精度的地形图。利用DEM数据可以完成等高线的生成及注记高程点的自动赋值,地形要素数据采集基于DOM或数字立体测图的方法来判绘地物和地貌元素(水系、交通、居民地及设施、工矿企事业单位、植被等)。通过地物采集所获得的矢量数据和等高线矢量数据进行叠加生成所需的数字地形图。对于不能准确判定的要素(包括图形与属性),如地名、管线、境界等要素以及要素的属性应进行外业调绘,根据外业调绘和补测的成果,对采集的数据进行修改、增删和编辑。地形图编辑完成后应进行接边和图幅的整饰从而生出满足规范要求的产品。
3.4. 精度统计分析
项目完成后,对形成的22幅地形图进行随机抽样,根据内业成图情况以及测区实际特点,对测区内一些关键区域如大堤、房屋、道路、滩地等进行了等精度检测,每幅图选取20~50个检测点,把检测点展在地形图上,高程检测根据等高线进行高程内插,求得各点位的图面高程,从而计算出图面高程和实测高程的差值 [3] ;平面检测根据实测的地物坐标和地形图上该地物量取的图面坐标进行计算,检测点个数小于20时,以误差的算数平均值代替中误差。测图精度统计详见表1。
统计结果显示:检测图幅的平面(图上0.5 mm)和等高线中误差都在允许误差(±1/3 h,等高距为1 m)范围内,最大差值也满足规范要求(小于两倍中误差),成图精度完全满足1:10 000地形图要求 [4] ;在芦苇滩这类有植被覆盖区域高程精度略差,个别点位高程偏差大于0.5 m。
在水利河道行业中,地形图一般用于防洪减灾、河道冲刷及演变分析,对高程精度要求更加严格。为了更好的验证激光雷达测高的精度,我们特意挑选植被覆盖较少的“后洲”及大面积芦苇树林覆盖的“七弓岭”两幅图,利用全站仪对图上高程注记点进行放样检测,检测结果见表2、图4。
从表2来看,检测数据中误差小于允许中误差,检测差值除1点粗差外均在±0.5 m以内(两倍中误差),满足《水利水电工程测量规范》要求 [4] ,根据统计结果也进一步说明在植被覆盖区域高程精度略低,外业施测时

Table 1. Topographic map plane and contour lines measurement precision statistics
表1. 地形图平面及图幅等高线测量精度统计
Table 2. Note point elevation accuracy statistics
表2. 点云数据注记点高程检测精度统计
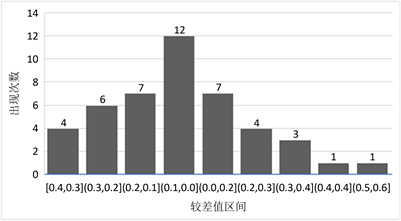
Figure 4. Note Point elevation detection poor distribution chart
图4. 注记点高程检测较差分布图
应把握合适的观测时机,在树木落叶、植被未生长起来的时候进行激光点云数据的采集。由图4可见绝大部分检测点的高程较差在±0.2 m以内,说明此项目采集的点云数据高程精度可靠,满足1:10,000地形图精度要求。
4. 结束语
通过本项目的实践应用,采用航空摄影与机载激光雷达相结合的作业方式进行地形图的测绘是可行的,其作业周期短、穿透力强、精度高的特点,特别适合完成大面积的洲滩、植被高覆盖的河道地形测量任务,也是现阶段最好的最高效的施测方法,今后在河道地形测绘中将得到越来越广泛的应用。但是,在技术操作和发展方面也存在着如下不足:
(1) 航空摄影和机载激光雷达设备均需要飞行器为载体。现阶段航空管制比较严格,申请空域手续复杂且时间比较长,对工期影响比较大。
(2) 航空摄影受天气等因素影响较大,应避开雨季和雾霾季节;机载激光雷达在测量过程中,传感器发射的激光脉冲能部分地穿透树林遮挡,但对于非常密集的植被,激光穿透的效果会比较差,所以测量时机的选择至关重要,数据采集工作应根据项目情况选择在冬季植被较为稀疏或植被未生长时进行。
(3) 机载激光雷达技术虽然可以解决大面积植被覆盖、地形复杂区域、危险区域及无法到达地区的测绘工作,但是在后期数据处理时,该区域点云数据的分类难度及滤波误差也相应较大,需加强人工干预,并在一些植被、建筑物或关键区域,需以常规测量手段辅助,从而提高DEM的精度。
(4) 航空摄影和机载激光雷达技术起步门槛较高,设备比较昂贵,使得该技术的推广应用受到一定的限制。