1. 引言
随着航天技术的不断发展以及人类对太空探索的不断深入,空间机械臂将扮演着越来越重要的角色。由于太空环境的恶劣会给宇航员的空间作业活动带来很大的威胁,因此使用空间机械臂去协助甚至代替宇航员完成一些危险性的工作,既可以在很大程度上保障宇航员的安全,也可以提高工作的效率,而且还可以提高经济效益。空间机械臂是一种多体系统,因而可以采用多体系统的建模方法。对于处在自由漂浮状态下的空间机械臂来说,臂杆的运动会影响本体的姿态和位置。因此,在实际研究中必须考虑空间机械臂臂杆和本体之间强烈的动力学耦合作用。
国内外学者对空间机械臂进行了深入的研究。Vafa等 [1] 提出了一种虚拟机械臂的概念,在忽略外力的前提下,系统的线动量和角动量守恒,这就为在空间机械臂系统中使用一般的控制方法提供了理论基础。梁斌等 [2] 讨论了如何将一个自由飘浮空间机器人等价成一个通常固定基座上的机器人,将其定义为动力学等价机械臂,并阐述了动力学等价机械臂与自由飘浮空间机器人运动学与动力学的等价性。Ozkan等 [3] 在动力学等价机械臂模型的基础上,忽略了系统的非线性因素,得到了系统参数线性化后的动力学方程,并且设计了控制器,使系统达到了渐近稳定。Huang等 [4] 在拉格朗日模型的基础上,设计了自适应滑模控制算法,保证了系统的渐近稳定。Abiko等 [5] 设计了新的自适应控制方法,在不考虑系统奇异性的情况下讨论了系统的稳定性问题。
本文针对空间机械臂的稳定性问题,在不考虑载体在空间内的旋转和系统的不确定性因素以及外界干扰性的前提下,设计了一种基于能量和姿态的控制器,充分考虑了系统非线性和强耦合的作用,有效地避免了运动过程中的奇异值问题,并且在目标位置处进行了稳定性分析。
2. 空间机械臂的数学模型
空间机械臂(图1)的组成主要分成两个部分:一部分是本体,另一部分是与本体相连接的两根臂杆,其中在本体与第一根臂杆以及第一根臂杆和第二根臂杆关节处分别施加有一个驱动力矩。将系统各参数和变量的定义分别设置为
 :本体的质量;
:本体的质量; :第
:第 根臂杆的质量(
根臂杆的质量( );
); :臂杆
:臂杆 质心到关节
质心到关节 的距离;(
的距离;( );
);
 :本体的转动惯量;
:本体的转动惯量; :第
:第 根臂杆杆的转动惯量(
根臂杆杆的转动惯量( );
);
 :本体质心至臂杆处第一关节的距离;
:本体质心至臂杆处第一关节的距离; :关节
:关节 到臂杆
到臂杆 质心的距离(
质心的距离( );
);
 :本体与竖直方向的夹角;
:本体与竖直方向的夹角; :第一根臂杆相对本体所旋转的角度;
:第一根臂杆相对本体所旋转的角度;
 :第二根臂杆相对第一根臂杆所旋转的角度。
:第二根臂杆相对第一根臂杆所旋转的角度。 :机械臂第
:机械臂第 个关节上的驱动力矩(
个关节上的驱动力矩( );将拉格朗日函数L定义为系统动能和势能之差,即
);将拉格朗日函数L定义为系统动能和势能之差,即

Figure 1. A simplified model of the space manipulator
图1. 空间机械臂的简化模型
 (1)
(1)
其中 和
和 分别表示为系统的动能和势能,且
分别表示为系统的动能和势能,且 。在空间环境中,重力的缺失使得在拉格朗日力学方程中,只需要考虑其动能。因此对于空间机械臂来说,
。在空间环境中,重力的缺失使得在拉格朗日力学方程中,只需要考虑其动能。因此对于空间机械臂来说, 。为方便计算,先定义几个有用的参数
。为方便计算,先定义几个有用的参数 ,且
,且
 ;
;
空间机械臂的拉格朗日方程为
 (2)
(2)
其中 。由式(1)和式(2)可得系统的动力学方程为
。由式(1)和式(2)可得系统的动力学方程为
 (3)
(3)
其中 为系统的广义速度,
为系统的广义速度, 为系统的广义加速度;
为系统的广义加速度; 为系统的惯性矩阵;
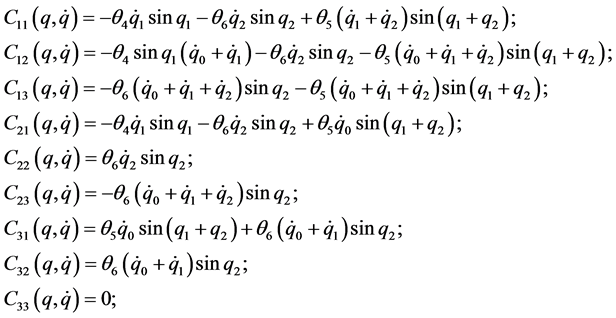
为系统的惯性矩阵; 代表系统的科氏力和离心力。其中
代表系统的科氏力和离心力。其中

具体表达式分别为

 的行列式
的行列式 ,可知存在一个向量
,可知存在一个向量 使得
使得
 (4)
(4)
其中 是任意的n维列向量。
是任意的n维列向量。
3. 系统的无源性
系统中各物理量都是能量变化的反映。因此,从能量的角度来研究系统,也就意味着只要系统的能量得到了控制,系统的物理量也就得到了控制 [6] [7] [8] [9] 。也就是说,系统能量变化的属性是可以通过系统的耗散性和无源性来体现的。系统的总能量为
 (5)
(5)
对t进行求导可得
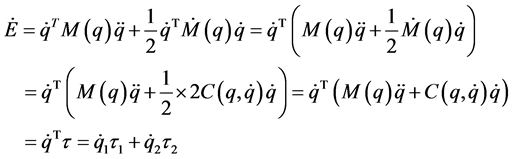 (6)
(6)
当时间 时,系统的总能量
时,系统的总能量 ,对式(6)两边积分可得
,对式(6)两边积分可得
 (7)
(7)
这表明系统对于输入 和输出
和输出 满足无源性条件。
满足无源性条件。
由上式可知,无源性主要是取决于系统的外部输入和输出。耗散不等式的物理意义在于它表明系统从外部所得到的总能量不能小于系统本身能量的增长量。这也就是说,只要系统是无源的,在运动过程中总是会有能量的消耗。
4. 控制律的设计
根据无源性理论,利用系统的总能量设计控制器,构造如下Lyapunov函数
 (8)
(8)
其中 、
、 、
、 、
、 和
和 均为大于零的常数。对t求导,可得
均为大于零的常数。对t求导,可得
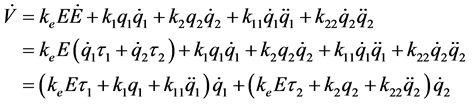 (9)
(9)
根据Lyapunov稳定性原理,要使系统达到稳定,则需要使 ,因此可令
,因此可令
 (10)
(10)
其中 和
和 均为大于零的常数。由式(9)和式(10)可得出基于能量法的控制律为
均为大于零的常数。由式(9)和式(10)可得出基于能量法的控制律为
 (11)
(11)
5. 稳定性分析
为判定系统的渐近稳定性,必须验证Lyapunov函数 沿系统状态轨迹的严格负定性。在实际系统中,构造出来的Lyapunov函数往往只满足
沿系统状态轨迹的严格负定性。在实际系统中,构造出来的Lyapunov函数往往只满足 。对此,系统的渐近稳定性可由LaSalle不变集原理来证明。先引入相关的定理:
。对此,系统的渐近稳定性可由LaSalle不变集原理来证明。先引入相关的定理:
定理1已知非线性系统 ,设
,设 是系统的有界正向不变集。若存在定义在U上的连续可微函数H:
是系统的有界正向不变集。若存在定义在U上的连续可微函数H: ,满足
,满足 ,
, ,那么,该系统对应于任意初始状态
,那么,该系统对应于任意初始状态 的解
的解 随时间t趋向于M,即
随时间t趋向于M,即 ,式中,M是集合
,式中,M是集合 所包含的最大不变集。
所包含的最大不变集。
该定理的意义就在于能够得出 会趋近并且进入
会趋近并且进入 ,而且最终会收敛于最大不变集M。因此,若能够判断出空间机械臂在
,而且最终会收敛于最大不变集M。因此,若能够判断出空间机械臂在 中的不变集只包含平衡点
中的不变集只包含平衡点 ,那么就可以得出平衡点
,那么就可以得出平衡点 是渐近稳定的结论。由式(10)可知,当
是渐近稳定的结论。由式(10)可知,当 时,则
时,则 ,
, ,即V和
,即V和 、
、 都是常数。现在分两种情况来证明
都是常数。现在分两种情况来证明
1) 若 ,即
,即 ,由式(3)可知,
,由式(3)可知, ,
, ,
, ,
, ;
;
2) 若 ,由式(3)、式(5)和式(10)可知
,由式(3)、式(5)和式(10)可知
 (12)
(12)
则 ,
, ,
, ,
, 。
。
由上述分析可得出最大的不变集M为 ,因此系统在该平衡位置处是渐近稳定的。
,因此系统在该平衡位置处是渐近稳定的。
6. 仿真实验
为了验证上述利用能量法设计出来的控制律对系统的控制稳定性,通过Matlab仿真工具对其进行试验。设本体的杆件号由0来表示,相关物理参数如下表1所示,
取
 ;
; ;
; ;
; ;
; ;
;
给定初值为:
 ;
; ;
; ;
;
 ;
; ;
; ;
;
目标位置为:
 ;
; ;
; ;
;
 ;
; ;
; .
.
仿真试验结果,如图2~9所示。其中图2~4分别表示了载体和两根臂杆随时间的角度变化,图5~7分别表示了载体和两根臂杆随时间的角速度变化,图8,图9分别表示了机械臂两个关节处驱动力矩随时间的变化。
从图中可以看出,系统的角度、角速度以及驱动力矩随着时间的变化最后都趋近于零,空间机械臂本体和臂杆之间确实存在着强烈的动力学耦合作用,且系统在运动过程中有效地避免了奇异值的出现。系统在 内趋于稳定,即达到了预期的运动状态,因此所设计的控制律是有效的。
内趋于稳定,即达到了预期的运动状态,因此所设计的控制律是有效的。

Table 1. Quality of geometric parameters of the system
表1. 系统的质量几何参数
Figure 3. The angle of the first root arm
图3. 第一根臂杆的角度变化
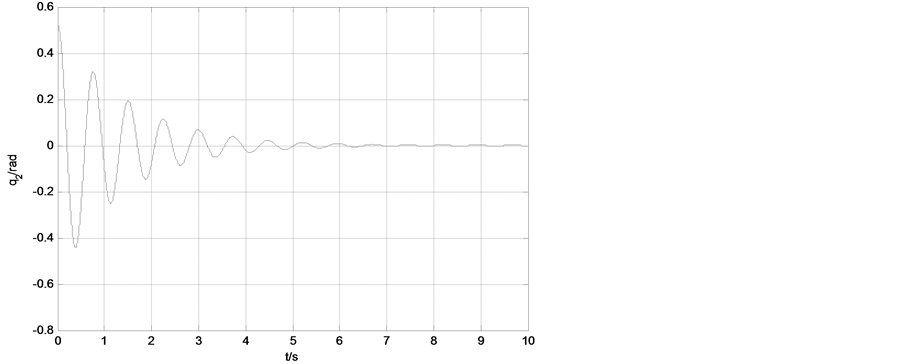
Figure 4. The angle of the second root arm
图4. 第二根臂杆的角度变化
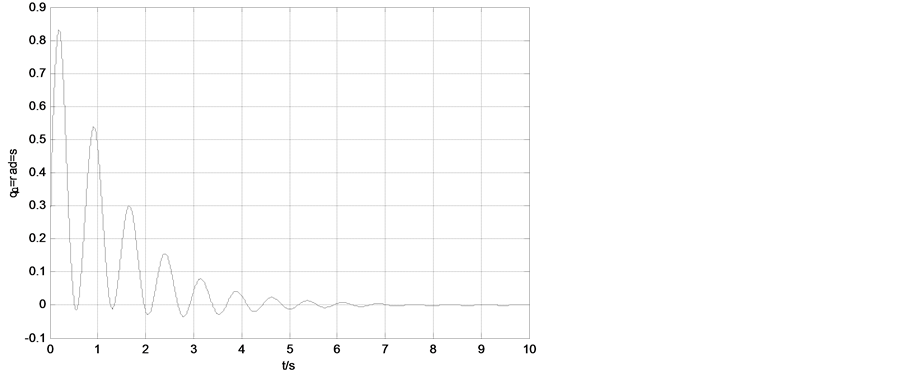
Figure 5. The angular velocity of the carrier
图5. 本体的角速度变化
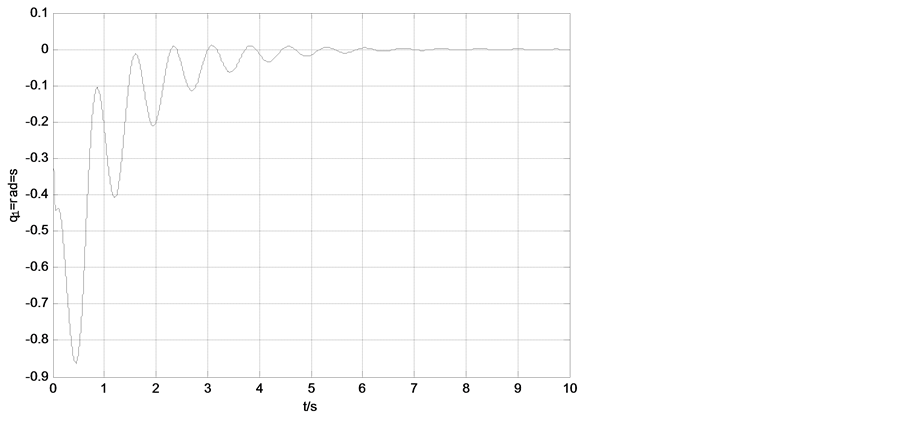
Figure 6. The angular velocity of the first root arm
图6. 第一根臂杆的角速度变化
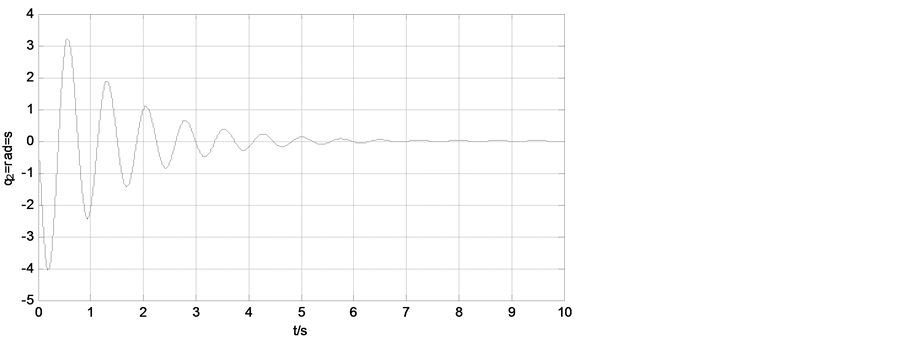
Figure 7. The angular velocity of the second root arm
图7. 第二根臂杆的角速度变化
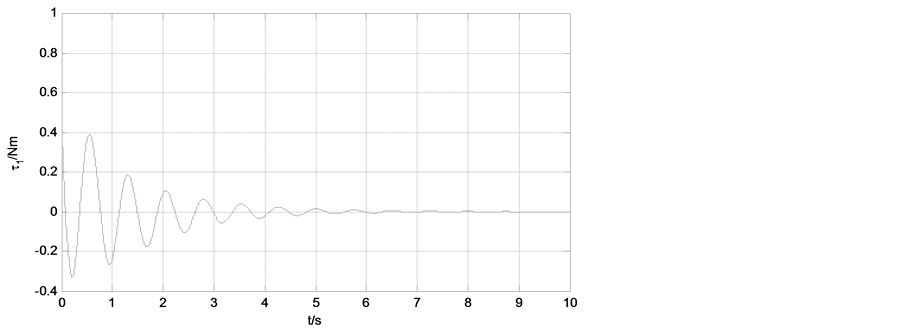
Figure 8. The driving moment of the first joints of robot arm
图8. 机械臂第一个关节处的驱动力矩
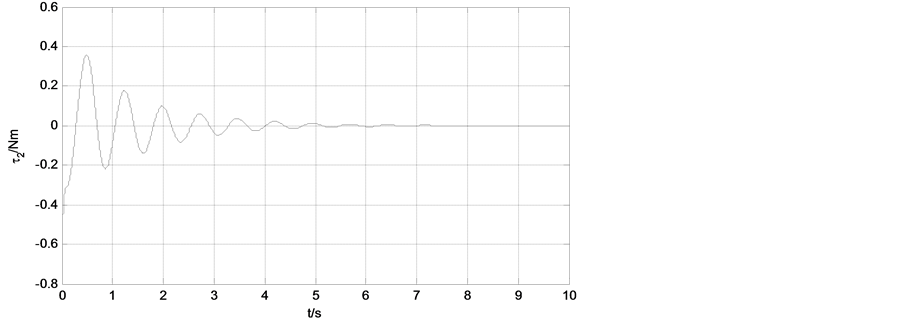
Figure 9. The driving moment of the second joints of robot arm
图9. 机械臂第二个关节处的驱动力矩
7. 结论
本文中,从能量的角度出发,系统在满足无源性条件的基础上,构造了Lyapunov函数和基于能量法的控制律,使系统达到稳定,并用拉萨尔原理证明了系统的渐近稳定性。控制器的设计简单直观,而且充分地考虑了系统的非线性及本体和臂杆之间的耦合作用,具有很强的鲁棒性。仿真结果也表明该控制方法的有效性。
基金项目
国家自然科学基金资助项目(NO.11472058)。