1. 引言
近年来,随着电力电子技术与控制算法的发展,电机的性能得到了大幅提升,在工业制造 [1] 、航空航天 [2] 、交通运输 [3] 等领域得到了广泛应用。直流伺服电机因其精度高、适应性好、易于控制等特点被广泛应用于需要精确控制角度的系统上 [4] 。
目前,PID串级控制结构因其设计简单、调试方便、抗扰能力出色等特点在工业界被广泛应用在直流电机伺服系统中 [5] ,其一般为“位置环–速度环–电流环”的三环结构或是“位置环–速度环”的两环结构。在传统的位置环回路中一般只采用PID控制,但由于串级控制结构每个反馈回路的连续计算以及伺服电机本身的非线性特性,传统的PID串级控制很难通过参数的调整达到超调量与快速跟随性能的同时最佳 [6] 。为了提高位置回路的跟踪性能,目前在位置伺服系统中应用最广泛的是前馈 + 反馈的复合控制方法 [7] 。传统的前馈控制是一种依赖于系统精确数学模型以及操作人员先验知识的控制策略,而直流伺服电机本身具有非线性和电路结构参数易变化等特点使得传统前馈控制在实际的工业应用当中难以达到预期的效果 [8] 。
神经网络具有高度自学习和自适应能力,能够通过学习和训练来精确逼近非线性系统,并能适应系统参数的时变 [9] ,其控制方法简单,仅需被控制对象实时地输入输出数据便能实现控制,能有效提高控制系统的稳态精度。文献 [10] 将循环神经网络前馈控制器与单神经元比例–积分–微分控制器相结合对压电驱动器进行跟踪控制,有效提升了神经网络的建模精度以及控制器的跟踪性能。文献 [11] 在控制回路中采用神经网络辨识器建立控制系统的动态逆模型,并将其训练参数复制给神经网络前馈控制器,用于对PID控制器进行前馈补偿,显著提升了球杆系统位置控制的稳态精度。文献 [12] 针对传统串级PID控制结构无法通过调整参数达到快速跟随性能和抗扰性能同时最佳的问题,设计了一个在线学习系统逆模型的神经网络前馈控制器,对PID控制器进行前馈补偿,同步提升了永磁同步电机转速控制时的快速响应特性和抗扰特性。以上利用神经网络进行基于系统逆模型的前馈控制方法能够有效提升直流伺服电机的快速跟随性能和稳态跟踪性能。但由于神经网络的建模精度严重依赖于训练样本的数据量,在实时控制中,当跟踪阶跃、方波等具有快速突变特性的参考信号时,信号跃变瞬间缺乏有效的样本数据来充分训练神经网络,导致其输出具有很大的不确定性。
模糊推理作为一种智能算法,具有释义明确、推理可靠等优点,常用于解决不确定性推理问题 [13] 。目前,鲜有文献针对直流伺服电机的位置跃变控制进行深入研究,为了解决传统串级PID控制结构的局限性和欠训练神经网络前馈控制器输出控制量的不确定性导致的控制系统动态品质欠佳的问题,本文提出了一种基于模糊推理决策神经网络前馈补偿值的直流伺服电机位置跃变控制方法,进行了仿真和实验研究,改善了控制系统的动态品质。该方法的主要创新如下:1) 提出了一种基于模糊推理自适应决策神经网络前馈补偿值的直流伺服电机位置跃变控制结构,提升了控制系统的动态性能;2) 设计了模糊决策模块,自适应决策神经网络前馈补偿值,增强了控制系统的稳定性;3) 仿真和实验结果表明,提出方法在不牺牲稳态精度条件下,显著提升直流伺服电机的快速跟随性能,减少了控制系统的超调量和调节时间。
2. 直流伺服电机数学模型
本文提出的方法不需要被控对象的精确模型,仿真实验的目的是为了方便验证所提出的神经网络控制模块具有建立被控对象逆模型的能力,以及方便分析神经网络模块欠训练时的输出特性,并基于此设计模糊决策模块,故在建立直流伺服电机数学模型时,为了简化分析,做如下假设:
1) 功率转换装置的电阻及电感均包含在电机电枢电阻及电枢电感中;
2) 总转动惯量为传动机构中所有转动部分折算到电机轴上的等效转动惯量和电机轴本身转动惯量之和;
3) 忽略粘滞摩擦;
4) 电流环、速度环、位置环的反馈系数均取为1,构成单位反馈系统;
5) 励磁磁通保持不变,
由KVL可得直流伺服电机电枢回路电压平衡方程为:
(1)
式中,
为电枢电压,
为电枢电流,R为电枢电阻,L为电枢电感,
为电机反电动势。
当电机工作时,电枢回路会产生一个反向电动势,其与电机转速成正比:
(2)
式中,
为电动势系数,
为电机转速。
根据刚体的转动定律,电机轴上的转矩平衡方程为:
(3)
式中,
为电机电磁转矩,
为包括电机空载转矩在内的负载转矩,
为系统转动惯量。
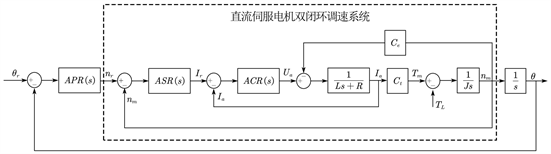
Figure 1. Block diagram of the control structure of the mathematical model of DC servo motor
图1. 直流伺服电机数学模型控制结构方框图
当磁通不变时有:
(4)
式中:
为转矩系数。
联立式(1)、(2)、(3)、(4)并进行拉普拉斯变换,可直流伺服电机的数学模型控制结构方框图如图1所示。图中ARP(s)、ASR(s)、ACR(s)分别为位置环、速度环、电流环控制器,
为给定的目标角度。
3. 基本原理
3.1. 控制系统结构
系统采用“电流环–速度环–位置环”三闭环的控制结构。电流环和速度环采用传统PID控制,位置环采用本文提出的基于模糊推理决策神经网络前馈补偿值的直流伺服电机位置跃变控制结构,总体控制原理如图2所示。位置环的控制结构由三部分组成:模糊决策模块、神经网络控制模块以及基础控制模块。其中,模糊决策模块由量化因子
、
、模糊化接口、规则库、模糊推理器以及输出变化率限幅因子
组成;神经网络控制模块由结构、参数完全相同的神经网络辨识器和辨识器克隆模型组成。基础控制模块选用如今应用最广泛的PID控制器。当实时控制时,神经网络辨识器基于位置环输出量
和输入控制量
进行在线学习,通过调整网络参数来建立被控对象的动态逆模型,辨识器克隆模型则实时复制神经网络辨识器经过在线学习后的参数,并根据期望输出
,前向运算产生前馈控制量
,对PID控制器的输出进行动态补偿。模糊决策模块在保证控制系统稳定的前提下,根据系统的误差e与误差变化率ec推断出决策因子
(
),决策因子经过限幅之后输出
,用于自适应决策神经网络控制模块欠训练时的前馈输出量,削弱其在欠训练时对系统造成的不确定性影响,保证控制系统具有较好的动静特性和稳定性。PID控制器的作用则是在控制初期保证整个系统的稳定以及为神经网络的训练提供样本数据。
3.2. 控制量的计算
系统的总控制量计算如下:
(5)
式中,
为PID控制器的输出量,
为辨识器克隆模型经过决策因子自适应调整后的输出量。
的计算如下:
(6)
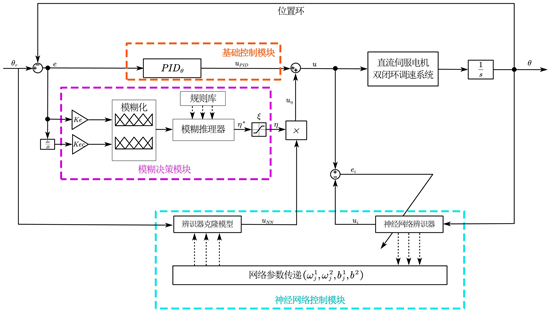
Figure 2. Block diagram of control structure based on neural network feedforward compensation quantity decided by fuzzy inference
图2. 基于模糊推理决策神经网络前馈补偿值的控制结构框图
式中k表示当前采样时刻,
表示上一个采样时刻,
表示采样时间,e表示误差,
、
、
为PID控制器的超参数。
的计算如下:
(7)
实时控制时,直接将目标值 作为辨识器克隆模型的输入,则前馈控制量
的计算过程如下:
作为辨识器克隆模型的输入,则前馈控制量
的计算过程如下:
(8)
式中,
神经网络的前向传播过程。
3.2.1. 神经网络的前向传播
神经网络共三层,分别为输入层、隐含层、输出层隐含层神经元数目为5。考虑一个单输出单输出的三层神经网络模型,分析神经网络辨识器与辨识器克隆模型的前向传播过程,如图3所示。
输入层:直接将目标r作为神经网络的输入,即:
(9)
式中:
为输入层的输入,
为输入层的输出。
隐含层:将输入层的输出
进行线性加权之后作为此层的输入,并使用激活函数进行处理,最后输出经过处理后的值,即:
(10)
(11)
式中,
为隐含层第j个神经元的输入,
为隐含层第j个神经元的输出,
为输入层与隐含层第j个神经元相连的权值,
为隐含层第j个神经元的偏置,
为激活函数,本文使用的激活函数为Sigmoid函数,具体如下所示:
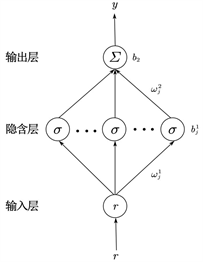
Figure 3. Forward propagation of neural network
图3. 神经网络的前向传播
(12)
输出层:将隐含层的输出进行线性加权求和操作后直接输出,得到y,其计算如下:
(13)
(14)
式中,
为输出层的输入,
为输出层的输出,
为隐含层第j个神经元与输出层之间相连接的权值,
为输出层的偏置。
3.2.2. 神经网络的训练
整个神经网络控制模块的网络训练过程在神经网络辨识器中完成,将位置环的实际输出
作为神经网络辨识器的输入,前向传播得到
,通过
与实际的总控制量u之间的损失值来进行在线学习,反向传播更新网络参数,建立被控系统的动态逆模型。
为了达到建立精确的被控系统逆模型的目的,定义神经网络训练时的损失函数如下:
(15)
神经网络中权值和偏置的更新公式如下:
(16)
(17)
(18)
(19)
式中,
、
为
和
的学习率与动量因子,
、
为
和
的学习率与动量因子。引入动量因子项的目的是为了加快收敛速度以及防止神经网络学习时陷入局部最值。
3.3. 模糊推理模块设计
现有研究表明,基于系统逆模型的神经网络前馈控制方法能有效提高控制系统稳态精度,但受限于控制初期以及跟踪信号跃变瞬间的有效训练样本较少,其动态性能较差。模糊推理能够有效解决许多不确定性问题,通常被应用于对未知非线性系统的自适应控制当中。其控制原理简单,且易于设计,能较好的改善控制系统的动态性能。故在神经网络前馈控制结构中引入模糊推理,以提高直流伺服电机位置跃变控制的动态性能。
3.3.1. 模糊化及输出函数
误差e和误差变化率ec直接反应了电机的位置信息的同时也能大致反应控制器的控制效果。故为了保证系统的整体稳定性的同时提升其动态性能,选用误差及误差变化率作为模糊推理模块的输入。
相对于传统的Mamdani模糊推理,T-S模糊推理没有解模糊化这一过程,其输出为清晰值或为输入量的函数,具有运行速度快的优势 [14] ,更适合应用于本文信号跃变瞬间需要快速抑制欠训练的神经网络前馈控制量输出的情况。故在本文控制结构中引入T-S型模糊推理,以提高系统的动态性能。将输入变量划分为七个模糊子集{NB (负大),NB (负中),NS (负小),ZE (零),PS (正小),PM (正中),PB (正大)},输出函数采用0阶TS模糊推理,使用五个常值来进行表示,模糊划分为{ZE (零),MS (中小),M (中),MB (中大),BB (大大)}。模糊输入输出变量的论域见表1,输出函数的取值见表2。量化因子Ke、Kec的取值将根据实际情况进行调整。

Table 1. The domain of the input variables of the fuzzy inference engine
表1. 模糊推理器输入输出变量论域
Table 2. The value of the output function of fuzzy inference engine
表2. 模糊推理器输出函数取值
三角形隶属度函数具有结构简单、便于运算的优点,被广泛运用于大型系统的实时计算中 [15] ,为加快模糊推理的运算速度,设计模糊集包含7个三角形隶属度函数,如图4所示。
3.3.2. 模糊规则及输出计算
模糊规则设计依据如下:
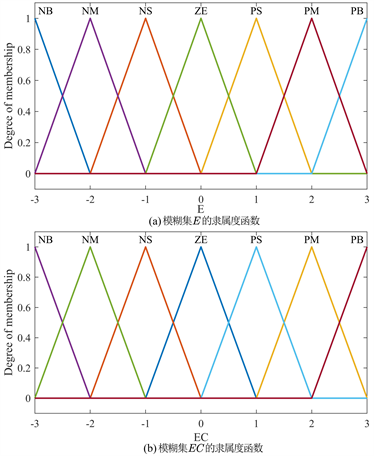
Figure 4. The membership functions of fuzzy inference engine input
图4. 模糊推理器输入的隶属度函数
当e和ec的绝对值都很大时,一般处于信号跃变的瞬间,神经网络辨识器的有效训练样本较少,系统逆模型还未精确建立,故前馈补偿控制效果不佳,此时应尽量减小模糊推理器的输出以抑制神经网络控制模块对系统的不确定性影响。
当e的绝对值很小但ec的绝对值相对较大时,一般跟踪曲线已经接近给定曲线,神经网络辨识器的有效训练样本较多,逆模型已经比较精确,此时需要适量增大模糊推理器的输出来释放前馈控制量,使辨识器的权值尽快收敛。
随着采样的增多,神经网络逆模型更加精确,e和ec的绝对值都很小,此时模糊推理器的输出应为1,不再对神经网络控制模块做出调整,使其充分发挥出提高系统稳态精度的优点。
根据以上的专家经验,利用模糊语言及模糊逻辑将上述准则转化为模糊规则表,共49条,见表3。
Table 3. Rule table of fuzzy inference engine
表3. 模糊推理器规则表
输出的计算方法采用加权求和法,当某个输入激活了m条规则,则其输出的计算如式(21)所示,权值的计算方法采用乘积法,如式(22)所示。
(20)
(21)
式中,
为模糊推理器的总输出,
为第
条规则的权重,
为第
条规则所对应的输出,
为人为确定的认定权重,
、
为输入量
、
属于模糊集合
、
的隶属度。
当在误差和误差变化率变化剧烈的情况下,模糊推理的输出抖动亦较为明显,此时会导致控制系统的紊乱,为避免系统出现不稳定状态,引入输出变化率限幅因子
对模糊推理器的输出做一定的限制,
的取值将根据实际情况进行调整,
到
的计算过程如下:
(22)
4. 仿真研究
为了验证本文所提出的控制方法的有效性,首先基于直流伺服电机的数学模型进行了仿真研究,本文采用的直流伺服电机参数如表4所示。
Table 4. Parameters of DC servo motor
表4. 直流伺服电机参数
分别对PID控制器,神经网络前馈控制器 + PID控制器(BP + PID)以及本文提出方法(Fuzzy + BP + PID)三种控制结构进行了仿真动态性能对比。三种控制结构中所用到的PID控制器的控制参数相同,神经网络结构及参数相同。
为了验证本文提出方法对直流伺服电机位置跃变控制动态性能的改善,跟踪目标采用具有强突变性质的阶跃信号和方波信号,性能指标选用超调量和调节时间。同时,为了证明本文方法不对系统的稳态跟踪精度造成影响,定义稳态平均跟踪误差(
)加入对比,如式(22)所示。控制系统采样时间为0.001 s。使用(−0.1, 0.1)这个范围内的数来随机初始化神经网络参数,参数初始化的范围不宜过大,否则可能会导致控制系统的失稳。
(23)
式中,
,
为输入参考信号的跃变幅值。
4.1. 阶跃信号跟踪仿真
阶跃信号的阶跃幅值为360,代表让电机从停止状态瞬间旋转360˚。通过多次调整,确定一组最优的PID参数,其值如表5所示。神经网络超参数
,
。决策模块输出变化率限幅因子
。根据控制过程中系统的e和ec,确定模糊推理器的量化因子
、
,认定权重均取值为1。
Table 5. Parameters of three-closed-loop PID controller with step signal simulation
表5. 阶跃信号仿真三闭环PID控制器参数
Table 6. Comparison of simulation tracking performance of step signal
表6. 阶跃信号仿真跟踪控制性能对比
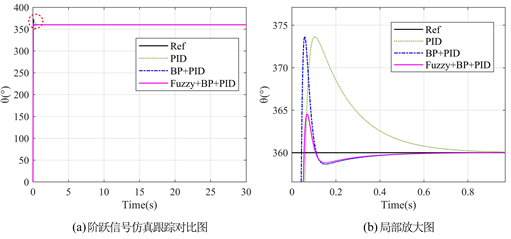
Figure 5. Simulation tracking result of step signal under three control structures
图5. 三种控制结构跟踪阶跃信号仿真结果
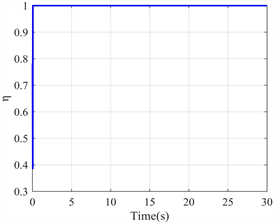
Figure 6. The change curve of decision factor η in step signal tracking simulation
图6. 阶跃信号仿真跟踪控制中决策因子η的变化曲线
跟踪控制仿真结果如图5所示。图5(a)为跟踪对比图,图5(b)为局部放大图。三种控制结构的跟踪性能对比见表6。图5与表6的仿真结果表明,BP + PID控制结构相较于普通PID控制器,直流电机的快速跟随性能和稳态跟踪精度明显变好,系统的调节时间以及
显著减小,但是产生的超调较大。当引入决策因子对神经网络控制模块的输出进行自适应调整时,控制系统超调减小为4.566˚,调节时间缩短到0.049 s,且
相较于BP + PID控制结构不发生明显变化,不影响系统的稳态精度。
决策因子η随时间的变化如图6所示。分析图5和图6可知,在信号跃变瞬间,由于前馈补偿控制量的加入,电机的快速跟随性能得到了很大的提升,但此时神经网络辨识器缺乏有效的训练样本,不能建立精确的逆模型,导致辨识器克隆模型不能立马输出精确的控制量,控制系统难免会产生较大的超调。此时系统的误差和误差变化率都很大,决策因子对神经网络前馈控制量的调整较为明显。随着有效训练样本数据的增多,神经网络逆模型的误差越来越小,前馈控制量越发精确,控制系统的跟踪误差和误差的变化率也随之减小,决策因子对于神经网络前馈控制量的调整作用迅速减弱,其输出很快便恢复到1。引入决策因子前后,神经网络控制模块的稳态输出控制量并没有改变,这也保证了控制系统的稳态性能。
4.2. 方波信号跟踪仿真
方波信号的幅值为360,PID参数如表7所示,神经网络超参数
,
。模糊推理器的输出变化率限幅因子
。根据系统的e和ec,确定模糊推理器的量化因子
、
,认定权重均取值为1。
Table 7. Parameters of three-closed-loop PID controller with square signal simulation
表7. 方波信号仿真三闭环PID控制器参数
跟踪控制仿真结果如图7所示,其中图7(a)为跟踪对比图,图7(b)、图7(c)、图7(d)为局部放大图,动态调节因子η的变化曲线如图8所示,三种控制结构在方波信号不同时刻跃变时刻的仿真跟踪性能对比如表8所示。
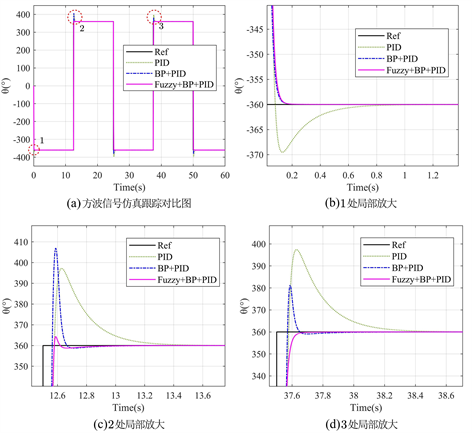
Figure 7. Simulation tracking results of square signals under three control structures
图7. 三种控制结构跟踪方波信号仿真结果
由图7与表8可知,无论在哪个跃变瞬间,BP + PID控制结构相较于普通PID控制器,在调节时间和
方面都有了明显的减小,电机系统的快速跟随特性以及稳态跟踪性能都得到了显著的提升,但是对于系统的超调具有不确定性的影响。在引入决策因子之后,Fuzzy + BP + PID控制结构相较于BP+PID控制结构,在不牺牲其稳态控制精度的情况下,显著减小了超调,同时也缩短了系统进入稳态的调节时间,进一步提升了系统的动态性能。
综合分析图7、图8以及表8可得:
在1处信号跃变瞬间,跃变幅值较小,PID控制器产生的超调较小,BP神经网络辨识器学习情况良好,位置控制无超调。但是由于神经网络的训练由数据驱动,其具体状态无法进行有效的预测,具有不确定性,所以根据提前设定的好模糊规则,模糊决策模块在信号跃变的瞬间任然对神经网络前馈控制量施加了一定的削弱作用,以防其对电机的位置跃变动作造成不确定性干扰。
在2处信号跃变瞬间,跃变的幅值增大了一倍,BP + PID控制结构的超调增大到了46.981˚,略大于PID控制器。模糊推理器推断出此时神经网络辨识器的学习状态较差,决策因子迅速对神经网络前馈控制量施加较大的削弱作用,系统超调减小为4.306˚,调节时间缩短为0.075 s。
3处信号跃变的幅值与方向与2处一致,但此刻神经网络辨识器的学习情况较好,由于PID控制器产生较大超调的影响,BP + PID控制结构仍会产生20.77˚的超调。此时模糊决策模块的输出与2处信号跃变瞬间大小相近的决策因子便可将系统超调减小为0˚,调节时间缩短为0.082 s。
对比1、2、3处信号跃变瞬间可知,即使在同一个控制周期内,在网络超参数不变的情况下,神经网络控制模块亦有可能因为学习情况的不同而输出不同的前馈控制量,体现了信号跃变瞬间神经网络前馈控制的不确定性,而决策因子的引入成功遏制了这种不确定性。
Table 8. Comparison of simulation tracking performance of the square signal
表8. 方波信号仿真跟踪控制性能对比
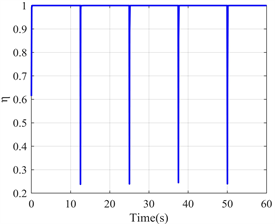
Figure 8. The change curve of decision factor η in square signal tracking simulation
图8. 方波信号仿真跟踪控制中决策因子η的变化曲线
5. 实验研究
为了验证本文提出方法在实时控制中的有效性,本文采用如图9所示的硬件在环平台进行了实验研究,在MATLAB/SIMULINK实时控制软件平台中,对连续阶跃和方波信号进行了跟踪控制。实验中的采样时间为0.003 s,使用(−0.1, 0.1)之间的数随机初始化神经网络参数。
5.1. 连续阶跃信号跟踪实验
在连续阶跃信号跟踪实验中,跟踪信号每20秒阶跃一次,幅值为360,PID参数如表9所示,神经网络超参数
,
。模糊推理器的输出变化率限幅因子
。根据系统的e和ec,确定模糊推理器的量化因子
、
,认定权重均取值为1。
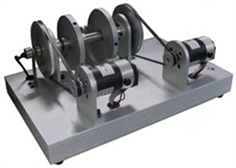
Figure 9. Experimental verification platform of the DC servo system
图9. 直流伺服系统实验验证平台
Table 9. Parameters of three-closed-loop PID controller with continuous step signal experiment
表9. 连续阶跃信号实验三闭环PID控制器参数
连续阶跃信号跟踪性能对比如表10所示,跟踪控制实验结果如图10所示,分析图10与表10的实验结果可知:
首先,对于PID三闭环控制结构而言:由于PID控制器为误差反馈控制器,只有当输出量发生变化,产生了误差之后,其才能发挥控制作用,导致系统的响应具有一定的滞后,而PID三闭环串级控制结构的每个回路都需要基于误差进行连续的计算才能完成反馈控制,这又增强了系统响应的滞后性。同时,为了保证整个系统的稳定,在设计PID控制器的参数很难使其达到快速跟随性能与抗扰性能的同时最佳,所以其产生的超调和调节时间都较大。
对于BP + PID控制结构而言:从给定目标信号出直接引出了直流伺服电机位置环的开环前馈控制,和PID闭环反馈控制一起,构成复合控制系统,显著提升了系统动态性能,系统进入稳态的调节时间以及超调都明显减小。但是基于神经网络的前馈控制器由数据驱动,在信号跃变的瞬间由于有效训练数据的缺乏,其并不能直接输出精确的前馈补偿控制量,导致系统依旧存在一定的超调。
对于Fuzzy + BP + PID控制结构而言:由于决策因子的引入,在神经网络控制模块欠训练时抑制其前馈补偿控制量,进一步提升了系统的动态性能。Fuzzy + BP + PID控制结构相较于传统的PID三闭环控制,超调、调节时间、
分别减小了89.3%、89.1%、72.4%,相较于BP + PID控制结构,超调与调节时间分别减少了79.9%和32.1%,且
保持在同等水平上。
图11为决策因子
的变化曲线,分析图10、图11可知,决策因子主要在跟踪信号变化剧烈时对神经网络前馈输出量做出适当的调整,使其更快收敛到目标值,进而提升了控制系统的动态特性。随着神经网络的训练,决策因子的调整效果也逐渐减弱,这也保证了控制系统的稳态精度。
Table 10. Comparison of experiment tracking performance of continuous step signal
表10. 连续阶跃信号实验跟踪控制性能对比
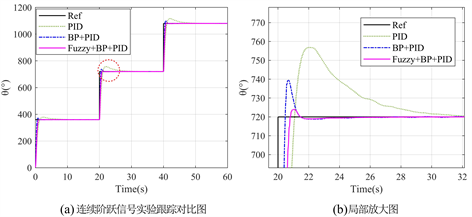
Figure 10. Experimental tracking results of continuous step signal under three control structures
图10. 三种控制结构跟踪连续阶跃信号实验结果

Figure 11. The change curve of decision factor η in continuous step signal tracking experiment
图11. 连续阶跃信号实验跟踪控制中决策因子η的变化曲线
5.2. 方波信号跟踪实验
方波信号的PID控制器参数如表11所示,神经网络超参数
,
。模糊推理器的输出变化率限幅因子
。根据系统的e和ec,确定模糊推理器的量化因子
、
,认定权重均取值为1。
Table 11. Parameters of three-closed-loop PID controller with square signal experiment
表11. 方波信号实验三闭环PID控制器参数
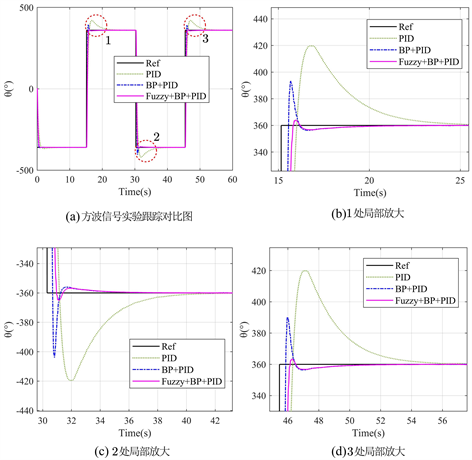
Figure 12. Experimental tracking results of square signals under three control structures
图12. 三种控制结构跟踪方波信号实验结果
方波信号跟踪控制实验结果如图12(a)所示,图12(b)~(d)为局部放大图,跟踪性能对比见表12,由图12和表12可知:在直流伺服电机位置环控制使用Fuzzy + BP + PID控制结构后,相较于传统的PID三闭环控制,超调平均减少92.9%,调节时间平均缩短87.7%,
减小68.6%。相较于BP + PID控制结构,超调平均减少了88.2%,调节时间平均缩短了21%,
维持在同一水平。
图13为决策因子η的变化曲线,分析图13与表12可知,在传统PID三闭环控制中加入神经网络前馈补偿控制,显著提升了直流伺服电机系统的快速跟随性能。面对方波信号的三处大幅值跃变时,神经网络辨识器权值的训练情况各不相同,导致BP + PID控制结构的控制效果不一,具有一定的不确定性,而决策因子的引入则进一步减小了超调和调节时间,使三处大幅值的跃变控制均取得了令人满意的控制效果。本文提出的方法在保证稳态精度的前提下,大大提升了控制系统的动态性能。
Table 12. Comparison of experiment tracking performance of the square signal
表12. 方波信号跃变瞬间仿真跟踪性能对比
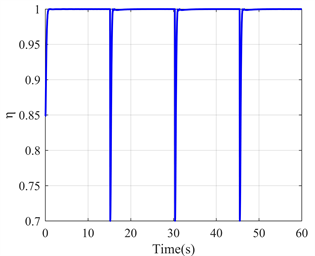
Figure 13. The change curve of decision factor η in square signal tracking experiment
图13. 方波信号实验跟踪控制中决策因子η的变化曲线
6. 总结
本文针对直流伺服电机位置跃变的控制问题,提出了一种基于模糊推理决策神经网络前馈补偿值的直流伺服电机位置跃变控制方法,并进行了仿真和实验验证。该方法在传统直流伺服电机PID三闭环控制的位置环控制回路中增设了神经网络控制模块和模糊决策模块。利用神经网络控制模块建立被控系统的动态逆模型,进行前馈补偿控制,提升直流伺服电机进行位置跃变控制时的快速跟随性能和稳态精度。在此基础上,设计模糊决策模块,削弱神经网络控制模块欠训练时输出的前馈控制量对控制系统的不确定性干扰,减小了直流伺服电机进行位置跃变控制时的超调。
实验研究结果表明,在相同的参数条件下,本文提出的方法相较于传统PID三闭环控制和传统神经网络前馈补偿控制方法,在跟踪连续阶跃信号时,超调量分别减小了89.3%和79.9%,调节时间分别缩短了89.1%和32.1%,在跟踪方波信号时,超调量分别减小了92.9%和88.2%,调节时间分别缩短了87.7%和21%,在不牺牲控制系统稳态精度的前提下,显著提升了其动态品质。
提出的控制方法是可靠的、高效的,适用于具有非线性和参数时变特性的控制系统,控制算法性能稳定,能有效改善控制系统在跃变瞬间的动态性能。