1. 引言
智能交通系统(ITS)是现代城市最重要的基础设施之一,是城市经济的重要组成部分,支撑着数百万人的日常交通。随着城市特别是特大城市和特大城市社会经济快速发展和人口增长,以及城市功能和发展方式布局不合理,交通运输系统日趋复杂,日常交通出行量大幅增加,交通供需不平衡、不足的问题日益严重,逐渐制约着城市的均衡发展 [1] [2] [3] 。
出行需求预测是ITS中最基本的问题之一。其中,短期城市出行需求预测 [4] [5] 对于传统的出租车服务和近年来兴起的一些在线出租车服务(如Uber、Drip等)都至关重要。同时,随着移动设备和无线通信技术的发展,海量的交通数据也随之产生。短期城市出行需求预测已成为平衡车辆供应和出行需求与低成本和高质量服务的有效工具。公共交通项目的规模往往很大,如果在建设时计算失误,随着时间的推移,错误的累积将难以逆转。如果要避免重大社会损失,准确预测出行需求至关重要。准确高效的短期城市出行需求预测可有效实现特定目标 [6] [7] (例如,减少交通拥堵、节省道路和停车成本、提高安全性、改善无人驾驶出行、节约能源、减少污染等)。
本研究的主要贡献总结如下。
1) 构建了一种叫做时空城市出行需求预测模型(Spatio-Temporal Urban Travel Demand Forecasting Model, STUTDFM)的新型架构,这是一种端到端的可训练模型,可以充分捕捉出行需求的外生依赖性和时空相关性。
2) 考虑了很多影响行程时间的因素,这些因素是精度的重要指标和参考。
3) 对初始数据进行进一步处理,突出道路节点之间的空间相关性,使时间序列数据预测方法更加准确。
2. 相关工作
城市出行需求的分析、预测和管理是配置公共交通资源、建设智慧城市的关键。对于城市出行需求预测,一些研究人员使用统计方法对城市出行需求进行建模。Kumar S.V. [8] 等人选取印度钦奈的一条三车道主干道作为研究路段,采用季节性微分自回归滑动平均(SARIMA)模型,以该路段三天的城市出行需求数据为输入,完成了一个使用SARIMA模型作为输入,完成了接下来24小时的跟踪流量预测的24小时预测。使用微分自回归滑动平均(ARIMA)模型或季节性移动平均(SARIMA)模型进行城市出行需求预测需要大量的交通数据进行模型开发,因此在没有足够数据的情况下可能无法使用ARIMA或SARIMA。
为了提高性能,深度学习被用来帮助预测 [9] [10] [11] [12] 。Lv [13] [14] 等提出了一种深度时空预测(DeepSTF)模型来预测交通流数据。Xu [15] 等人对影响城市出行需求的外部因素进行了深入研究。然而,大多数深度学习方法在预测过程中仅利用数据的时间依赖性或空间依赖性。为了解决这些局限性,Wang [16] 提出了一种基于深度时空ConvLSTM的深度学习交通需求预测框架。为了评估框架的性能,设计了一个端到端的深度学习系统并使用了一个真实的数据集。Guo [17] 等提出了一种用于短期出行需求预测的残差时空网络(RSTN)的深层架构。它由一个由完全卷积神经网络(FCN)和扩展卷积-LSTM (CELSTM)组成的混合模块组成,它通过调整卷积-LSTMs的超参数来实现卷积操作和LSTM单元之间的权衡,卷积神经网络(CNN)和传统的LSTM。这些模块通过残差连接进行组合,以捕获出行需求的空间、时间和外部依赖性。Wei [18] 等人提出了一种新颖的堆叠双向长短期记忆神经网络(SBi-LSTM),可以根据历史需求数据和其他相关信息预测城市每个区域的短期出行需求。最大的网约车平台(滴滴)评估基于中国最大的网约车平台(滴滴)提供的真实数据。
3. 模型设计
本节总结了STUTDFM的设计思想,详细阐述了STUTDFM模型各组件(外部特证提取组件、时空特征提取组件、数据融合组件)的计算过程和功能。STUTDFM的具体结构,如图1所示。
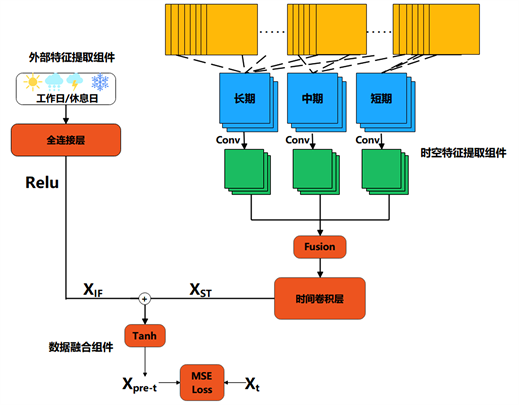
Figure 1. STUTDFM model structure diagram
图1. STUTDFM模型结构图
3.1. 外部特证提取组件
针对影响因素的特点,我们设计了一个外部特证提取组件来处理影响城市出行需求的因素的数据。由于部分数据的可访问性较低,我们重点关注天气类型、温度、工作日/休息日和节假日/非节假日等外部影响因素。其中,我们使用独热编码将天气类型转换为1x12向量,因为它不是数字数据。影响数据的形状设计为(时隙数,特征数)。在这种情况下,特征数的值为15,其中天气类型(12)、温度(1)、工作日/休息日(1)和假日/非假日(1)。然后我们将影响数据输入到一个全连接层进行特征映射。这样可以让映射结果
的形状与
的形状对齐进行融合。最后,使用Relu激活函数激活特征映射的结果。
3.2. 时空特征提取组件
在这里,我们使用卷积运算符来捕获空间依赖性 [19] [20] [21] 。经典卷积的输入是一个张量(例如,RBG图像),因此它可以写成
,其中∗表示卷积运算符后跟一个激活函数f,W和b是参数。图2显示了自然提供捕获空间依赖性能力的卷积。我们发现一个卷积层可以很好地描述空间区域中的近依赖,两个卷积层可以进一步描述远依赖。这意味着更多的卷积可以捕获更远的依赖关系,甚至是城市范围的依赖关系。短期、中期和长期都被送入相似的卷积层。使用卷积,它们各自的输出是:
其中*表示卷积运算符;f表示激活函数;W和b表示卷积运算中的参数。
、
、
分别是短、中、长期序列卷积后的输出。
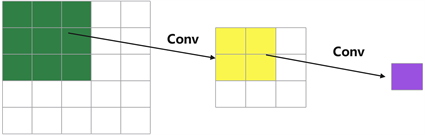
Figure 2. Capturing spatial dependencies by convolution operators
图2. 通过卷积算子捕获空间依赖性
如图1所示,在完成空间特征提取后,我们基于具有不同影响权重的可训练参数矩阵来融合短期、中期和长期数据的时空特征。这样使得后续的时间卷积层能够充分提取时间特征。融合方法如式(1)所示
(1)
其中
是Hadamard积,
、
、
是可训练的地面参数矩阵,b是偏差。
为了捕获时间特征数据,设计了一种新颖的时间卷积层来计算数据的时间相关特征,如图3所示。时间卷积层在三个主要方面很有用。
1) 保留所有历史信息,使用因果卷积计算长期历史信息。
2) 它使用零卷积来扩展卷积过程的感知域。空隙因子根据凸函数变化,这样模型就不会有过大的感知场,从而在深度计算时导致局部信息丢失。
3) 完全由卷积网络组成,使用多层残差结构代替传统递归神经网络的门控结构。它克服了传统递归神经网络缺乏对并行计算的支持和训练速度慢的问题。

Figure 3. Temporal convolution layer structure
图3. 时间卷积层结构
3.3. 数据融合组件
等式(2)给出了融合外部特征提取组件和时空特征提取组件的方法,Tanh激活函数保证输出值分布在[−1,1]范围内。其中
表示输出值,
是Hadamard乘积,
和
分别是可训练参数矩阵,b是偏差。
、
和b是通过最小化预测值和真实值的均方误差(MSE)获得的。这样STUTDFM就可以调整外部特征提取组件和时空特征提取组件对整体预测模型的影响权重。
(2)
4. 实验
在本节中,我们将在出租车出行需求的真实数据集上评估所提出的模型,并验证其对短期出行需求问题的预测能力。同时,我们将我们的架构与其他几个模型进行比较,并进行消融研究以证明所提出的方法。
4.1. 数据集

Table 1. The TaxiBJ-13, TaxiBJ-14, TaxiBJ-15, and TaxiBJ-16 data sets
表1. The TaxiBJ-13, TaxiBJ-14, TaxiBJ-15, and TaxiBJ-16 数据集
我们使用Zhang等人 [22] 提供的2013年至2016年北京出租车流量的四个数据集进行实验。北京的规模逐年扩大。北京不同区域的功能也在逐年变化。因此,有必要逐年考虑北京的出租车流量。我们根据不同的年份将四个数据集表示为TaxiBJ-13、TaxiBJ-14、TaxiBJ-15和TaxiBJ-16。北京主城平均划分为32 × 32格(共1024格)。每个网格代表一个区域。城市出行需求情况可以用各个区域的出租车流出量来表示。这四个数据集的各种属性如表1所示。对于每个数据集,我们使用上周的数据作为评估数据,并将之前的所有数据作为训练数据。另外,这个数据集有两点需要注意。首先,出租车流量的采样间隔设置为30分钟。因此,一天有48个时间段。其次,最大/最小需求是指TaxiBJ-13/TaxiBJ-14/TaxiBJ-15/TaxiBJ-16数据集中的最大/最小需求。有关更多详细信息,请参见表1。此外,我们使用了BikeNYC数据集,数据取自2014年4月1日至9月30日的NYC Bike系统。该区域被划分为16 × 8的网格。该数据集的各种属性如表2所示。对于该数据集,我们使用最近十天的数据作为测试数据,其余数据作为训练集。
4.2. 基准
设置了三种类型的基线来验证模型的性能,包括传统统计模型、时空神经网络和图时空神经网络。所有模型都针对该过程的相同数据集进行了训练和评估。实验结果是多次训练和评估的结果的平均值。实验的各种基线的模型结构如下。
ARIMA:可用于对时间序列进行预测,常用于需求预测和规划。
SARIMA:ARIMA的扩展版本,可以支持具有季节性成分的时间序列数据LSTM:它通过门控机制控制数据的传输状态。与普通的RNN只机械地叠加一种记忆不同,LSTM的原理是长期保留需要记住的信息,忘记不重要的信息。
ConvLSTM:与LSTM相比,增加了一种能够提取空间特征的新卷积运算。
GRU:其输入输出结构类似于普通的RNN,处理逻辑类似于LSTM。与LSTM相比,GRU具有比LSTM更少的内部“门控”和更少的参数,但实现了与LSTM相似的功能和准确性。考虑到硬件的计算能力和时间成本,GRU是更多从事深度学习研究人员的选择。
ConvGRU:在GRU中加入卷积运算,从而可以处理图像特征;DeepST:这是一个基于DNN的时空数据预测模型;GCN:是对图像进行加权和求和的过程一个空间区域中的像素通过一个过滤器来获得一个新的特征表示。加权系数是卷积核的参数。
4.3. 评估指标
两个指标用于评估模型的性能,包括均方根误差(RMSE)和平均绝对误差(MAE),如等式(3)和等式(4)所示。
(3)
(4)
MAE可以衡量模型预测结果的准确性,但它们是基于绝对误差的计算。虽然绝对误差给出了一个评估值,但是没有办法知道这个值所代表的模型表现得有多好,唯一的方法就是通过模型之间的比较来了解最佳模型。RMSE是预测值与真实值的偏差平方与观测值n之比的平方根。RMSE是预测值与真实值之比的度量。它测量预测值和真实值之间的偏差,并且对数据中的异常值更加敏感。因此,RMSE是预测结果精度的一个很好的指标。
4.4. 实验结果
在本节中,我们将STUTDFM与其他几个著名模型进行比较,以验证STUTDFM模型在预测城市出行需求方面的有效性。表3显示了STUTDFM和基线之间的比较结果。此外,我们还为EIEC设计了消融实验,结果如图4所示。
SARIMA是一种传统的时间序列预测模型,对线性数据建模的能力很强。受多种因素的影响,城市出行需求数据呈现出复杂的非线性模式。因此,随着预测时间的增加,预测误差会逐渐增大,预测精度会逐渐下降。
与SARIMA相比,ARIMA具有更简单的结构。ARIMA只需要内生变量而不需要求助于其他外生变量。但是,ARIMA只能预测稳定的数据或差分后稳定的数据。此外,ARIMA本质上只捕获线性关系而不是非线性关系。因此,ARIMA不能有效预测城市出行需求。
GRU和LSTM是经典的时间序列预测模型。与GRU相比,LSTM可以捕获更长的历史信息。因此,LSTM在这项工作中优于GRU。ConvGRUs和ConvLSTM可以对城市出行需求数据的时间依赖性和空间相关性进行建模。因此,ConvGRU优于GRU,ConvLSTM优于LSTM。DeepST是一种基于DNN的时空数据预测模型。它考虑了一些影响时空数据的常见外部因素。但是,在外部因素与时空特征数据融合阶段,没有考虑到外部因素与时空数据对预测结果影响的权重不同。
GCN是最近出现的时空数据预测模型,可以端到端的同时学习节点特征和结构信息,但是没有考虑一些影响时空数据的常见外部因素,所以性能比DeepST更好,但仍然不如STUDFM。与基线相比,STUTDFM具有最好的性能。一方面,时空特征提取组件是基于城市出行需求时间序列数据设计的。它可以通过三种方式建模:短期、中期和长期数据。因此,时空特征提取组件可以保留所有历史信息。总之,时空特征提取组件适合处理长期时间序列。另一方面,STUTDFM中的外部特征提取组件考虑了影响城市出行需求数据的外部因素。平均而言,与四个数据集的其他基线的预测相比,STUTDFM分别将MAE和RMSE降低了约24.47%和20.36%。此外,我们对STUTDFM是否使用外部特征提取组件进行了消融实验。我们对五个数据集进行了消融实验,即TaxiBJ-13、TaxiBJ-14、TaxiBJ-15、TaxiBJ-16和BikeNYC。图4显示了TaxiBJ-13、TaxiBJ-14、TaxiBJ-15、TaxiBJ-16和BikeNYC的消融实验结果。
Table 3. Results of comparison between STUTDFM and baseline
表3. STUTDFM与基线的对比结果
Table 4. Performance metrics for STUTDFM models when external factors are not handled using EIEC components
表4. 当外部因素不使用外部特征提取组件处理时,STUTDFM模型的性能指标
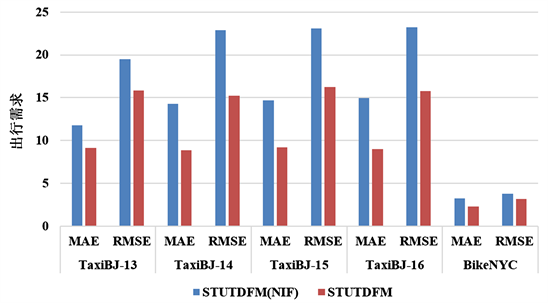
Figure 4. Comparison results of TaxiBJ-13, TaxiBJ-14, TaxiBJ-15, TaxiBJ-16 and BikeNYC with and without EIEC components for external factors
图4. 在数据集TaxiBJ-13 , TaxiBJ-14 , TaxiBJ-15 , TaxiBJ-16 and BikeNYC是否使用外部特征提取组件提取外部因素特征的对比结果
从表4和图4可以看出,与STUTDFM (NIF)相比,STUTDFM具有明显更好的性能。与不考虑影响因素的STUTDFM (NIF)模型相比,STUTDFM的MAE和RMSE分别平均降低了约33.57%和25.83%。这表明外部因素的使用有助于提高模型的性能。这是因为城市出行需求数据具有高频噪声和复杂的波动模式,而外部因素对出行需求数据的影响可以通过外部特征提取组件捕捉到,可以更好地拟合一些局部极值。
5. 结论
在本文中,我们提出了一种易于构建的深度架构,称为时空城市出行需求预测(STUTDFM),用于城市出行需求预测,该架构由外部特征提取组件、时空特征提取组件和数据融合组件三个组件组成。外部特征提取组件可以从外部因素中提取特征,时空特征提取组件可以基于具有不同影响权重的可学习参数矩阵来融合时空短期、中期和长期数据。数据融合组件使用可训练参数矩阵来融合时空特征提取组件和外部特征提取组件的输出。我们使用四个真实世界的数据集证明了模型的有效性。我们可以得出结论,与ARIMA、SARIMA、LSTM、GRU、DeepST和GCN等几种算法相比,STUTDFM的性能更好。还有一些问题需要进一步研究。例如,我们仅使用出租车数据集来探索城市出行需求预测的时空模式,但仅使用出租车数据是不够的,接下来我们应该使用更多类型的数据集来更深入地研究这个问题。
基金项目
本研究得到国家重点研发计划重点专项项目(2018YFB2100303)、山东省高校青年创新科技计划创新团队项目(2020KJN011)、山东省自然科学基金项目(ZR2020MF060)的部分资助。山东省创新型博士后人才资助号40618030001,国家自然科学基金资助号61802216,国家博士后科学基金资助号2018M642613。
NOTES
*通讯作者。