1. 引言
随着全球石化能源的枯竭 [1] ,风能作为一种可再生能源越来越受到人们的重视。根据《中国风电发展路线图2050》 [2] ,中国风电发展目标是:到2050年,风电装机容量将达到10亿千瓦,成为中国的五大电源之一,满足17%的电力需求。我国风电场开发正从陆上开发走向多种环境的海上风电场开发,相较于陆上风机,海上浮式风机的工作环境更加复杂,另外,风机质量与尺寸正随着海上风机的大型化而大幅增加,因此提升了对结构动态特性的要求,故研究风机在复杂载荷下的运动特性对保证风力机安全稳定运行意义重大。
目前,国内外许多学者对浮式风机的动力学响应进行了研究。黄承庚以NERL 5 MW风力机为研究对象,基于阶梯立柱式平台建立整体漂浮式风机,运用FAST和AQWA软件,实现风浪耦合作用下风机动态响应的求解 [3] 。徐添以国际能源署(IEA)公开的15 MW级大型半潜式浮式风机为研究对象,采用OPENFAST软件对浮式风机进行全耦合时域仿真模拟,对平台的纵荡、纵摇和垂荡运动特性进行研究分析,但未对系泊系统进行受力分析 [4] 。穆安乐基于FAST考虑风波联合作用研究了系泊结构参数对漂浮式风力机Spar平台运动响应的影响,采用莫里森方程求解波浪载荷,得到了浮式风力机的纵荡和纵摇的动力学响应,分析了系泊系统参数对系统稳定性的影响 [5] 。施伟等选取新型钢筋混凝土结构半潜浮式风机平台展开研究,采用ANSYS/AQWA建立半潜浮式基础的水动力数值模型,研究该平台的水动力性能 [6] 。Y.R. Alkarem研究了不规则性波动对漂浮式海上风力涡轮机(FOWT)水动力响应的影响,但未考虑风载荷作用 [7] 。赵志新等基于“气动–水动–控制–弹性”全耦合模型分析了DTU 10 MW风机在不同工况下的动力特性,并与5 MW风机进行对比 [8] 。
大型化风机在带来更好的发电效益的同时,也因其尺寸的增大,受到了更复杂作用,如绕射力,且由于海上工作环境复杂,浮式风机始终受到风浪作用力、锚链力等环境载荷的联合作用,其运动状态也因此总呈不平衡、不规则状态,加上海水、气流对结构(如系泊线)的冲击、腐蚀作用,其运动状态很可能因结构的破坏而产生巨大的改变,直接影响运行安全。因此开展风机在复杂海洋环境荷载作用下的动力响应研究具有十分重要的意义。本文采用ANSYS/AQWA、Openfast等软件,以SNL13.2MW半潜式风机为研究对象,根据我国海况设计合理的工况,并基于“气动–水动–控制–弹性”全耦合计算模型,针对风机平台水动力性能展开研究,并通过对比分析风机系统在不同工况下的动力学响应、系泊故障下的运动性能,综合研究13.2 MW风机的动态特性,最后与同条件下10 MW风机的动态特性进行对比,为提高半潜式浮式风机平台的安全性提供理论参考。
2. 计算理论
2.1. 风机运动方程
风浮式风机时域运动响应取决于其受到的气动载荷、水动载荷、系泊力,其时域运动方程为:
(1)
式中,
表示浮体质量矩阵,
表示频率无穷大时浮体附加质量矩阵
、
、
分别表示浮体在t时刻j自由度时的加速度,速度,位移,
为迟滞函数,
为浮体的回复力矩阵,
、
、
分别表示浮体受到的气动力、水动力、系泊力。
2.2. 气动理论
计算风机的气动性能的理论主要有:涡轮尾迹法,基于求解N-S方程的CFD方法 [9] ,叶素动量理论(BEM) [10] ,相较于涡轮尾迹法,叶素–动量理论以其直观简洁、计算效率高等优点广泛应用于水平轴风力机研究中,故本文采用BEM方法求解气动载荷,如图1。

Figure 1. Velocity triangle and force analysis of blade element section
图1. 叶素截面速度三角形及受力分析
图中,
为平均风速,a为轴向诱导因子,
为切向诱导因子,
为距离轮毂中心r处叶素转速。流经叶素的入流风速由来流风速和叶轮旋转速度合成为入流速度,入流角度可以根据三角函数关系计算得到,根据动量定理,叶素上的推力和扭矩可以表示为式(2)和(3):
(2)
(3)
风机所受到风载荷通过TURBSIM [11] 软件生成,模拟时间为5000 s,生成的风模型主要有湍流风与定常风,后通过基于BEM理论的FAST-Aerodyn模块计算风机的气动载荷。图2(a)为平均风速为11 m/s的湍流风场,图2(b)为风场的网格划分图。
2.3. 水动理论
由于本文研究对象为超大型海上风机,无法忽略其对波浪场的影响,必须考虑绕射效应,且其工作环境为上百米深的海域,波幅与波高的比值接近无穷小,海底波流对自由表面引起的非线性影响可以忽略,故本文采用线性微幅波,绕射理论计算波浪载荷,如下式。
(4)
(5)
(6)
(7)
(8)
式中,
表示入射波速度势,
表示散射波速度势,g表示重力加速度,r表示波离浮体的径向距离,n为浮体表面某点的外法线矢量,式4为控制方程,式5为自由表面边界条件,式6为海底边界条件,式7为物体表面条件,式8为Sommerfeld条件 [12] 。
 (a) Turbsim模块生成的湍流风示意图
(a) Turbsim模块生成的湍流风示意图  (b) 风场网格分布图
(b) 风场网格分布图
Figure 2. Visualization of turbulent wind models and wind field meshing
图2. 湍流风模型的可视化与风场网格划分
3. 半潜浮式风力机模型参数
本文将桑迪亚国家实验室(Sandia National Laboratories)公开的SNL-13.2MW半潜式浮式风力机计算模型 [13] 作为研究对象,如图3所示,该机组为三叶片水平轴风机,包含3部分:风机、平台和系泊系统。

Figure 3. SNL13.2 MW semi-submersible floating wind tur-bine diagram
图3. SNL13.2 MW半潜式浮式风机示意图
3.1. 风力机模型参数
SNL-13.2 MW半潜式浮式风力机的塔架采用改进后的NREL 5 MW风力机的塔架,风轮叶片则采用桑迪亚国家实验室开发的100 m级叶片SNL100-02 [14] 。风轮与轮毂直径分别为205 m、5 m;轮毂中心高度为133.5 m;额定风速为11.3 m/s;风轮、塔架的质量分别为422,131 kg、1,452,131 kg,详细的参数请参考文献 [13] 。
13.2 MW风机的平台是通过比例放大OC4平台 [15] 得到,由一根连接着塔架的主柱与三根与浮筒相连的偏移柱组成,主柱与偏移柱通过5套铁架组连接,每个偏移柱从SWL上方开始,然后继续在水下延伸。在三个偏移柱的底部是一个直径较大的圆柱体即基柱,该结构有助于抑制垂荡运动。平台的具体参数见表1。

Table 1. SNL13.2 MW wind turbine platform parameters
表1. SNL13.2 MW风机平台参数
风机的系泊系统由3条锚链组成,每两条锚链之间的夹角为120˚,缆孔布置在水位线(SWL)下21 m处的底柱顶部,与深度为150 m锚点相连接,布置方式如图4所示。
 (a) 系泊系统布置局部示意图
(a) 系泊系统布置局部示意图 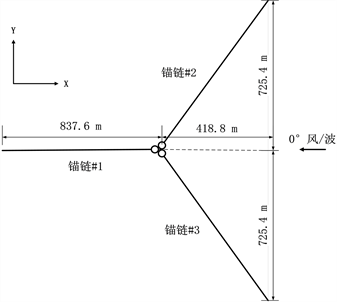 (b) 系泊系统布置整体示意图
(b) 系泊系统布置整体示意图
Figure 4. Mooring system arrangement schematic
图4. 系泊系统布置示意图
3.2. 计算工况
本节为风浪联合作用下的SNL-13.2 MW半潜式浮式风机的时域仿真模拟设计工况。风机实际工况复杂多变,故计算将JONSWAP谱生成的不规则波作为水动载荷的基本类型,并且考虑湍流风对风机运动的影响。
为了使工况更符合实际,仿真结果更适用于我国海域,工况设计参考了IEC 61400标准 [16] 及我国相关海域的风浪流统计数据 [17] [18] ,工况的具体数据见表2。
Table 2. Environmental parameters under different operating conditions
表2. 不同工况下的环境参数
4. 仿真结果与分析
4.1. 平台水动力分析
4.1.1. 幅值响应算子
通过ANSYS/AQWA模拟计算入射角为0˚的波浪作用于OC4半潜浮式风机平台上时,平台纵荡、纵摇及垂荡方向的RAO,计算结果见图5。由图5可知,在入射波浪为0˚的情况下,OC4平台纵荡、纵摇方向上,平台RAO随波浪频率增加逐渐减小,最后趋向于零。垂荡方向上,随波浪频率增加,平台RAO均先增大后减小,再小幅波动最后趋向于零,另外,当入射波的频率趋近于0时,平台垂荡方向的幅值响应算子趋近于2.4,这是由于波长将在波浪频率趋近于无穷小时,趋向于无限大,OC4平台的尺寸相比于波长来说很小,相当于整个平台全部处于波浪的波峰处。纵摇方向上,随波浪频率增加,平台RAO小幅波动后先增大,在频率为0.04 Hz处达到峰值,然后减小,在小幅波动后趋向于零。

Figure 5. Response amplitude operator of platform
图5. 平台幅值响应算子
4.1.2. 自由衰减曲线与固有频率
本节通过OpenFAST进行包括锚泊系统在内的浮式风机的自由衰减模拟,研究SNL 13.2 MW风机各自由度运动的固有周期。通过禁用AeroDyn模块、设置HydroDyn模块的波浪模式为“静水“,使得FAST能在不考虑风、波浪、海流而仅考虑浮体初始位移的情况下模拟浮体的运动,即模拟浮体的自由衰减运动。设定自由衰减运动的模拟时长为1000 s,风机纵荡、横荡、垂荡的初始位移设定为15 m,横摇、纵摇及首摇的初始位移为5˚。图6为风机6自由度上的自由衰减曲线,由自由衰减时域数据转得到的功率谱密度曲线可知其固有频率,计算结果如下:风机纵荡与横荡、垂荡,横摇与纵摇、首摇固有频率分别为0.005 rad/s、0.048 rad/s、0.032 rad/s、0.010 rad/s。
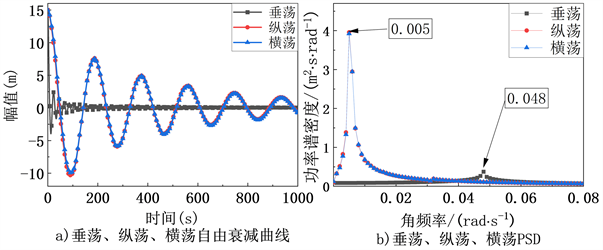
Figure 6. Degrees-of-freedom free decay curves of wind turbines and their natural frequencies
图6. 风机各自由度自由衰减曲线及其固有频率
4.2. 风机动态特性分析
对于漂浮式风力机平台动态响应特性的研究,风波耦合作用必须予以考虑 [19] 。本节主要模拟13.2 MW超大型半潜浮式风机系统在“气动–水动–系泊–控制”全耦合条件下的运动响应。由于纵荡、纵摇、首摇运动对半潜浮式风力机而言较为重要,故本文仅研究纵荡、纵摇、首摇运动响应。根据表2中所设计的环境参数,使用FAST对SNL 13.2 MW浮式风力机系统与DTU10MW风机系统 [20] 进行全耦合分析,波浪载荷为Jonswap谱生成的不规则波,入射方向为0˚;风荷载选取湍流风,入射方向为0˚。计算总时长为5000 s,截取1000 s至4000 s的时程数据消去瞬态反应对计算结果的影响。
4.2.1. 风机运动响应时域分析与频域分析
图7为浮式风机系统在不同工况下纵荡、纵摇、垂荡方向的时域运动响应,表3为浮式风机运动的统计特征值,通过对比工况1、工况2知,相较于极端工况,风机系统在平衡状态下的偏移在额定工况下更大,说明风机的变桨控制 [21] 对纵荡、纵摇运动效果明显。垂荡方向上,由于风机垂荡运动幅值主要受波浪控制,其在极端工况下的平衡状态偏移更大。结合图7和表3可知,SNL 13.2 MW半潜浮式风机系统在正常海况不规则波及湍流风作用下达到平衡状态时,纵荡方向的运动响应幅值为最大为12.73 m,垂荡方向的运动响应幅值为0.29 m,纵摇方向的运动响应幅值最大为2.79˚。一般而言,风机在正常运行工况下的漂移不应超过工作水深的5%,摇摆不超过±3˚ [22] ,可见SNL13.2MW半潜式浮式风机系统在正常运行下的运动响应是基本满足要求的,能保证风机的安全运转。
图8为浮式风机系统在不同海况下纵荡、纵摇、垂荡方向的功率谱,由图8可知,纵荡方向功率谱曲线两处峰值分别出现在0.005 rad/s、0.63 rad/s分别对应纵荡固有频率与波浪谱峰频率。在纵摇方向上,有三处峰值,分别位于0.005 rad/s、0.032 rad/s、0.63 rad/s,与纵荡运动的功率谱类似,对应纵摇的固有频率与波浪谱峰频率;在垂荡方向上有两处峰值,分别在0.048 rad/s、0.63 rad/s。对比风机在无风工况与风波联合作用工况下的功率谱曲线,发现风载荷将对纵荡、纵摇、垂荡运动的较高频运动与纵摇的低频运动造成激励。另外,风机在纵荡、纵摇、垂荡方向的功率谱曲线峰值位置与固有频率、波浪频率的对应现象在类似的风机仿真工作的结果一致 [6] [23] ,间接验证了本文仿真的可靠性。

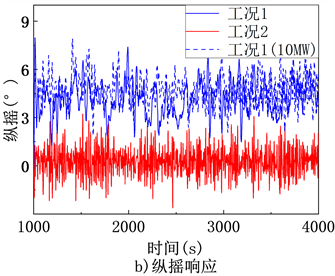
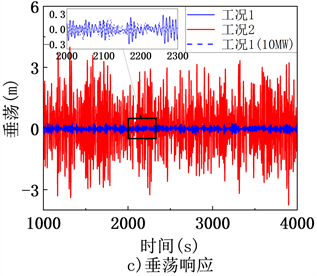
Figure 7. Time domain dynamic response of the wind turbine under different operating conditions
图7. 不同工况下的风机的时域动态响应图
Table 3. System resulting data of standard experiments
表3. 标准试验系统结果数据



Figure 8. Power spectral density of 13.2 MW wind turbine system under different sea conditions
图8. 13.2 MW风机系统在不同海况下的功率谱密度
4.2.2. 故障情况下风机运动响应的时域分析
系泊线可能会因恶劣环境或重复性疲劳载荷而断裂,这将导致平台的位置和方向发生重大变化,并造成严重事故,如系泊线断裂后的漂移平台与邻近平台的碰撞 [24] 。因此在风机设计评估中考虑平台在恶劣条件下的系泊缆断裂失效问题是必要的。系泊系统的布置见图4,由于2号和3号系泊缆的对称性,故只考虑1号和3号系泊缆断裂的情况。设定1号或3号系泊缆在1200s时断裂,此时风机以3˚/s的变桨速率进行停机控制,得到风机纵荡、纵摇、垂荡运动的时域运动响应,如图9所示。



Figure 9. Time domain motion response of wind turbine in surge, heave and pitch
图9. 风机纵荡、纵摇、垂荡运动的时域运动响应
由图9中锚链1与锚链3断裂后风机的动态特性对比可知,锚链1在纵荡、纵摇方向造成的响应幅值要显著大于锚链3 (或锚链2);风机在极限工况下,锚链1或锚链3系泊缆断裂后,在三自由度上的运动均能达到平衡,在垂荡方向的位移变化不明显,在纵摇方向上的位移有突变,在纵荡方向上变化十分显著,尤其在锚链1断裂的情况下,平衡位置从0 m转换到523 m,约为2.6 D (D为风轮直径),考虑到海上风电场中,风力机之间前后间距为7~8 D,左右间距为3~5 D [25] ,单台风机单锚链的断裂不太可能碰撞邻近平台。
4.3. 13.2 MW风机与10 MW风机动态特性对比
在额定工况下,对SNL 13.2 MW半潜海上浮式风力机与DTU10MW风机使用FAST进行全耦合分析,由二者的运动响应的对比图7和表3可知:在纵荡、纵摇、垂荡运动上,相较于10 MW风机,13.2 MW风机的运动均值变化不大。比较图7中13.2 MW和10 MW浮式风力机相近工况下 [6] 运动响应频谱可知:10 MW浮式风力机由波浪荷载所激励的波频运动的幅值略高于13.2 MW浮式风力机波频运动的幅值;13.2 MW浮式风力机由风荷载所激励的低频纵荡运动的幅值略高于10 MW浮式风力机低频纵荡运动幅值,且前者的低频的纵摇幅值要显著高于后者的低频纵摇幅值,验证了文献 [6] 观点:浮式海上风力机大型化后,风荷载对风力机系统运动的低频激励作用更突出。
5. 结论
本文针对SNL 13.2 MW半潜浮式风机平台的水动力性能、风浪联合作用下的动力响应及锚泊系统性能展开研究,对平台在不同工况下的运动特性和动力学响应进行了对比分析。得出以下结论:
1) SNL 13.2 MW半潜浮式风机平台在湍流风作用的正常运行工况下,纵荡、纵摇、垂荡的响应幅值较小,处于合理范围内,满足风机正常安全工作的规范要求;极限工况下,由于变桨作用,风机在纵摇、纵荡方向运动幅值小于额定工况下的幅值,在垂荡方向幅值显著大于额定工况,但在较深水域仍满足安全工作规范要求。
2) SNL 13.2 MW半潜浮式风机平台极限工况下,单条系泊线断裂时,能实现新的平衡。在纵荡上,1号或2号系泊缆断裂后,在剩余系泊缆张力的影响下,风机在纵荡方向产生较大的位移,但最终能达到新平衡位置。
3) 正常工况下,13.2 MW风机与10 MW风机在纵荡、纵摇、垂荡方向上的动态响应差异较小。前者的低频的纵摇幅值要显著高于后者的低频纵摇幅值,验证了文献 [6] 观点:浮式海上风力机大型化后,风荷载对风力机系统运动的低频激励作用更突出。
基金项目
1) 国家自然科学基金委员会,青年项目,61803325,基于光纤检测系统的运营期海上风电叶片多区域损伤定位机理研究,2019-01至2021-12,25万元,在研,主持。
2) 江苏省应急管理厅,研发示范类项目,YJGL-YF-2020-13,基于光纤检测的边坡在线检测系统优化构建及其云图预测机制研究,2021-01至2022-12,20万元,在研,主持。
3) 教育部科技发展中心,新一代信息技术创新项目,2019ITA01024,大数据背景下鱼类产品可溯源管理平台研发,2020-09至2021-09,2万元,在研,主持。
4) 江苏省科学技术厅,产学研合作项目,BY2020621,电流温度型保护器自动生产系统研发,2020-01至2021-12,50万元,在研,主持。
5) 江苏省人力资源和社会保障厅,“六大人才高峰”高层次人才项目,XYDXX-103,光纤Bragg光栅边坡传感监测系统优化构建研究及其云图预测机制研究,2019-07至2022-06,4万元,在研,主持。
6) 江苏省自然科学厅,江苏省自然科学基金项目,BK20181049,基于光纤检测系统的运营期海上风电叶片多区域损伤定位机理研究,2018-07至2021-06,20万元,在研,主持。
7) 江苏省教育厅,自然基金面上项目,18KJB510046,基于光纤检测系统的运营期海上风电叶片多区域损伤定位机理研究,2018-07至2020-06,5万元,结题,主持。
8) 校企合作,横向项目,电流温度型保护器自动生产系统研发,50万元,2020-04至2022-04,50万元,在研,主持。
9) 校企合作,横向项目,日照市入河排污(水)口排查野外调查工作及技术服务,21万元,2020-09至2021-11,21万元,在研,主持。
10) 校企合作,横向项目,大数据分析背景下的智慧交通APP研发及优化设计,2020-09至2021-09,100万元,结题,主持。
11) 校企合作,横向项目,YT22-1温度保护器产品开发和生产系统研发,2022-07至2023-07,100万元,在研,主持。
参考文献