1. 引言
混沌产生于非线性确定动力系统,它看似随机却有着内在的稳定性,对系统初值具有高度的敏感性,运动形式随着系统参数的变化而改变。混沌领域重点探讨的问题有判断系统的混沌特性、对不利于人类生产的混沌进行控制和消除并且生成有利的混沌。控制学的重要研究内容之一为非线性系统控制理论,而非线性控制理论的重要应用领域则为混沌控制。微机电谐振系统是一种非常复杂的非线性系统,它的结构中主要包括一些弹簧、电阻、电容、电感及阻尼器等非线性器件 [1] [2] [3]。目前,国内外学者都对此系统的非线性特性作深度探究,研究方面包括频域响应曲线的弯曲度和跃变现象等。同时对微机电谐振系统的混沌及其控制研究也有着极其重要的意义。
本文根据模糊系统的万能逼近原理,并结合模糊逼近理论,对不确定的微机电谐振混沌系统建立了模糊近似模型,并且在此基础上结合自适应控制和模糊滑模控制技术,提出了一种模糊自适应滑模控制策略 [4] [5] [6]。通过对系统的模糊建模可以不需要确定系统的精确模型。仿真结果表明了此方法可以将混沌系统控制到任意期望位置,证明了此方法的鲁棒性 [7]。
2. 微机电谐振混沌系统模型 [8]
微机电系统数学模型的无量纲运动方程如下:
(1)
无量纲变量x和
定义
,
,
,式(1)中各对应参数关系为:
,
,
,
,
。
是自然频率,d代表的是微梁间距的初始宽度,z是横梁的垂直偏移量。
,其中
是直流偏置电压,
和
分别是交流电压幅值和频率。
假设:
系统(1)可表示为:
(2)
给定系统参数
,
,
,
,
,
,
,取系统初值为
,运用Matlab进行数值仿真,仿真结果如下图1~4所示。
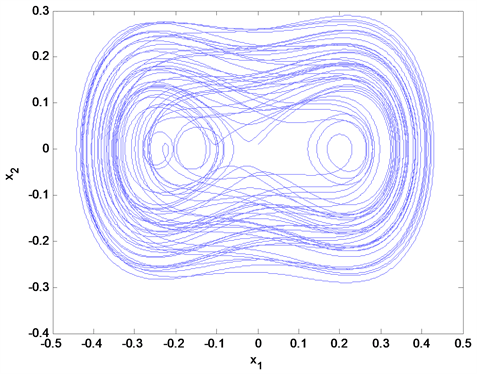
Figure 1. Phase diagram of microelectromechanical resonance chaotic system
图1. 微机电谐振混沌系统的相图
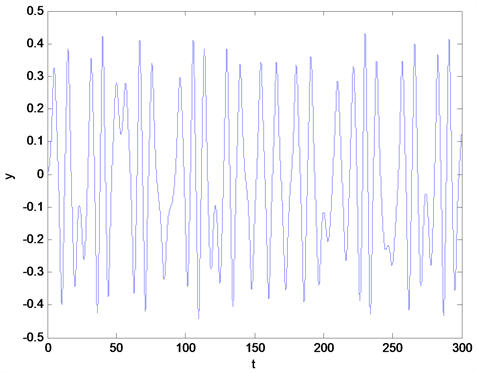
Figure 2. Time history of microelectromechanical resonant chaotic system
图2. 微机电谐振混沌系统的时间历程

Figure 3. Poincaré section of microelectromechanical resonant chaotic system
图3. 微机电谐振混沌系统的庞加莱截面图
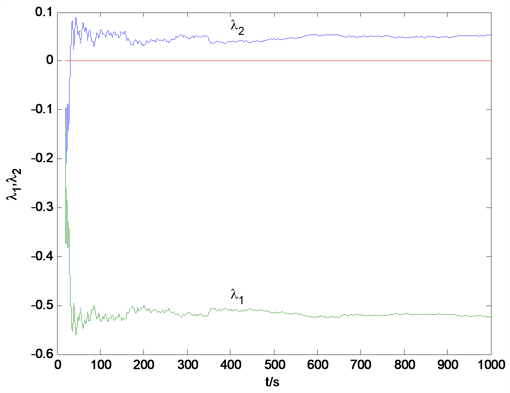
Figure 4. Lyapunov exponent of microelectromechanical resonant chaotic system
图4. 微机电谐振混沌系统的李雅普诺夫指
图1是微机电混沌系统的相图,由图可看出系统的轨迹是相互折叠,并且不封闭,因而系统是混沌的。图2是微机电混沌系统的时间历程图,图中系统的位移随时间不规则变化。图3是微机电混沌系统的庞加莱截面图,发现图中的映射点具有分形结构,则系统是混沌的。图4是当
时,系统在给定参数和初值下的Lyapunov指数曲线由Matlab仿真可知,指数
和
最终均趋近于一个固定常数。且这两个常数
,
,其中有一个为正,则系统产生混沌。
3. 基于模糊推理系统的建模 [9]
考虑如下二阶不确定被控系统:
(3)
其中,
为未知函数,
为控制输入。
根据模糊系统的万能逼近特性 [10],以
逼近
。针对模糊系统输入
和
分别设计5个模糊集,即取
,
或2,
,则共有
条模糊规则。
采用以下两步构造模糊系统
:
1) 对变量
,定义
个模糊集合
2) 采用
条模糊规则来构造模糊系统
,则第j条模糊规则为
(4)
其中,
,
,
,
为结论的模糊集。则第一条和第二十五条分别为
:IF
is
and
is
THEN
is
:IF
is
and
is
THEN
is
模糊推理过程采用如下4个步骤:
1) 采用乘机推理机实现规则的前提推理,推理结果为
;
2) 采用单值模糊器求
,即隶属函数最大值(1.0)所对应的横坐标
的函数值
;
3) 采用乘机推理机实现规则前提与规则结论的推理,推理结果为
,对所有的模糊规则进行并运算,则模糊系统的输出为
;
4) 采用平均解模糊器,得到系统的输出为
(5)
其次,
为
的隶属函数。
令
是自由参数,放在集合
中。引入模糊基向量
,式(5)变为
(6)
其中,
为
维模糊基向量,其第
个元素为
(7)
设最优参数为
(8)
其中,
为
的集合。则
其中,
为模糊系统的逼近误差。
假设位置指令为
,则误差及其变化率为
,
定义误差函数为
,
则
定义Lyapunov函数为
(9)
其中,
,
。
则
设计控制律为
(10)
则
取
,自适应律为
(11)
则
。
4. 数值仿真
考虑不确定微机电谐振被控系统:
(12)
其中,
为控制输入。取
,则
位置指令为
。取以下5种隶属函数对模糊系统输入
进行模糊化:
,
,
,
,
。则用于逼近f的模糊规则有25条。
根据隶属函数设计程序,可以得到隶属函数图,如图5所示。

Figure 5. Membership function of
图5.
的隶属函数
在控制程序中,分别用
、
和
表示模糊系统
的分子、分母及
。被控对象初始值取
,控制律采用式,自适应律采用式,向量
中各个元素取初值0.10,取
,
。仿真结果如图所示:图6是微机电谐振混沌系统在控制器作用下状态变量
和
被镇定到预期的位置与速度,并分别按期望的指令稳定运行;图7和图8说明受控系统的位置和速度跟踪误差衰减到零,即受控系统是稳定的;图9为系统被控制到稳定的周期一轨道的相图。
5. 结束语
本文对微机电谐振系统做了混沌动力学分析,利用模糊逼近理论,建立不确定的微机电谐振混沌系统的模糊近似模型,在此基础上结合自适应控制思想、模糊控制思想与滑模控制思想,提出了一种模糊自适应滑模控制策,该策略通过自适应方法在线估计系统中的未知参数,并通过模糊滑模控制来快速实现系统的镇定。仿真结果表明此方法可以使系统快速、稳定地跟踪目标信号,且具有良好的鲁棒性。模糊建模为混沌系统的模型辨识及消除混沌现象实际应用提供了极有价值的方法。
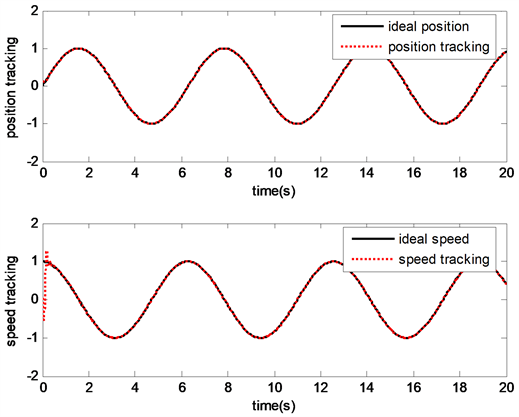
Figure 6. Position and speed tracking chart of controlled MEMS resonant system
图6. 被控微机电谐振系统位置与速度跟踪图

Figure 7. Position tracking error diagram of controlled MEMS resonance system
图7. 被控微机电谐振系统位置跟踪误差图

Figure 8. Speed tracking error diagram of controlled MEMS resonant system
图8. 被控微机电谐振系统速度跟踪误差图
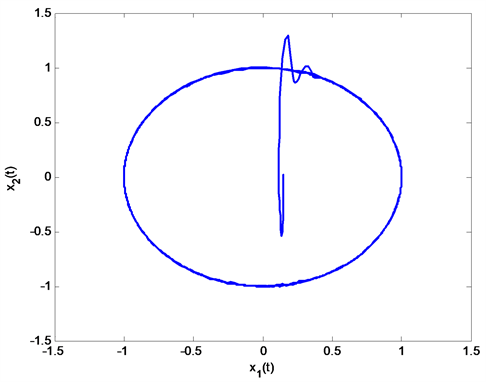
Figure 9. Phase diagram of controlled microelectromechanical resonance system
图9. 被控微机电谐振系统相图
基金项目
这项工作得到了国家自然科学基金(No. 12001404, No. 11901435)和天津自然科学基金(No. 18JCQNJC70100)和天津技术教育大学自然科学基金(No. KJ1814)的支持。
NOTES
*通讯作者。