1. 引言
天线的方向图是天线的重要特性,对于天线方向图的测试一般是采用远场测试。然而远场测试存在着诸多缺点,一方面是要满足远场条件,需要建造巨大的测试场地,这是由于远场条件需满足距离L ≥ 2D2/λ,这尤其是对大尺寸天线的测试场地要求很高;此外,远场测试更容易受周围环境的干扰影响。
新一代的天线测量方法是近场测量,也是目前国际上普遍采用的天线测量技术,是将测量得到的近场通过近远场变换算法得到远区辐射场的方法,包括球面近场测量和平面近场测量。近场测量具有测试精度高、受干扰影响小的特点 [1] [2],尤其对于高度相对较小、横向尺寸大的天线或辐射体,如弹载天线、机载天线等有大平台的天线。国内外关于近场测试方法的研究很多,比较成熟的有法国SATIMO公司研制的球面近场测试系统和美国NSI公司研制的平面近场测试系统。国内北京理工大学针对时域平面近场测量进行了深入研究 [3] [4];西北工业大学李南京等老师对球面近场测量的校准方法、测量误差以及近远场外推算法进行了分析研究 [5] [6];此外,西安电子科技大学、中国海事大学等单位对天线近场测量也开展了较多研究 [7] - [12]。以上国内的研究均偏重于理论分析,但对实际工程应用研究较少。
该文从工程应用角度,提出了一种简易的球面近场天线测试系统,主要用于快速测试S频段相控阵天线的辐射方向图性能。该测试系统由转台和圆弧形测试阵列组成,通过近远场外推的算法得到待测天线的远场方向图,通过将该测试系统的测试结果与远场测试系统的测试结果作对比,说明了本测试系统的正确性。
2. 系统组成及原理
本天线测试系统主要由转台、探头阵列、拱形支架、低辐射支撑结构、矢量网络分析仪、测试计算机等几部分构成。系统采用的是球形近场的测量方法,弧形探头阵列测得天线的辐射近场,然后采用近远场变换得到天线的远场辐射特性。图1给出了天线测试系统的组成示意图。
主控计算机控制矢量网络分析仪,在其控制下,矢量网络分析仪发射端口产生的激励信号通过被测相控阵天线辐射出去,23个探头天线接收到的23路信号通过衰减器衰减后送入开关矩阵,系统软件通过控制开关矩阵使不同通道的测试信号进入矢量网络分析仪的接收端口。如此反复直到转台旋转一圈,等采集完所有的数据,软件通过近远场外推算法计算出天线辐射特性。数据采集示意图如图2所示。
根据球面近场的采样准则 [13],采样间隔
,其中D为待测天线口径,k为传播系数。对于本测试系统,待测天线
,中心频点
,则
。因此,本测试系统设计的探头采样间隔为4˚,采用23个探头间隔8˚左右两侧交叉排布在弧形导轨的上,可实现俯仰方向4˚间隔的测试数据采集。
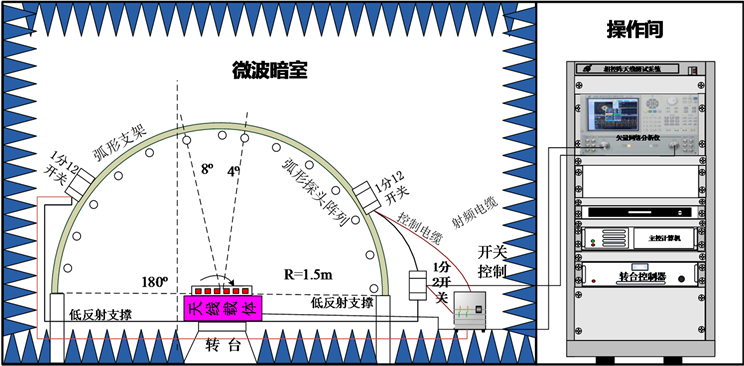
Figure 1. Composition diagram of phased array antenna measurement system
图1. 天线测试系统组成示意图

Figure 2. Diagram of data acquisition for phased array antenna measurement system
图2. 天线测试系统数据采集示意图
3. 主要模块及关键算法设计
3.1. 微波开关矩阵
微波开关矩阵作为系统的通道切换装置,实现23路通道之间信号的接收。本系统选择一个单刀2掷、两个单刀12掷的开关组成一个24路输入,一路输出的微波开关矩阵系统。输出的23路信号分别连接到两个单刀12掷开关上,然后输出的两路信号连接到单刀2掷开关,最后输出一路信号连接到矢量网络分析仪。开关控制器分别连接以上3个开关,实现对整个开关矩阵系统的控制。
3.2. 探头天线
探头天线用于接收被测相控阵天线的辐射场,由于本系统主要用于S频段右旋圆极化天线的测试,因此采用平面四臂螺旋天线作为探头天线,极化方式为右旋圆极化。其设计方式为在一个直径为4 cm,高度为1 mm,相对介电常数为2.65的圆盘介质基板上设计四臂螺旋天线,工作频率为S频段。也可根据需求更改探头天线的极化方式和工作频段。
3.3. 弧形导轨系统和方位转台
测试系统的拱形阵结构由机座、拱形阵机构、方位转台机构等组成,如图3所示。
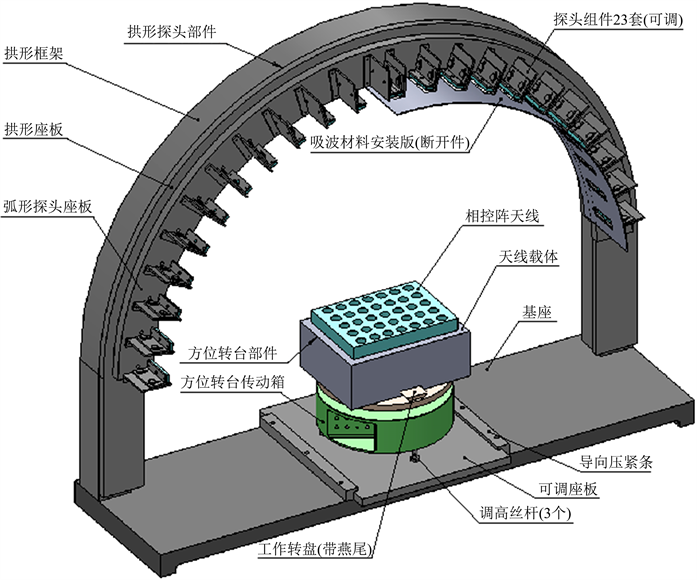
Figure 3. Mechanical structure diagram of the measurement system
图3. 测试系统机械结构图
拱形阵机构给23套可调整位置的探头天线组件提供拱形阵排列的测试机构。拱形框架设计成箱形截面以保证足够的强度和刚度,拱形座板装于其上,再在上面装弧形探头座板以供23个探头天线分布安装;系统能准确测试的关键是被测天线的中心点与23个弧形分布的探头天线的相对位置及距离的精确控制,为此设计了可微调探头高度的探头可调机构。
3.4. 吸波处理
对待测天线辐射特性产生影响的部位需进行专门的吸波材料处理。具体包括:待测天线上方的弧形支架结构、待测天线左右两侧的低辐射支撑结构、待测天线下方的方位转台基座。
此外,为尽可能保证待测天线辐射特性不受空间环境影响,专门设计了一个简易的吸波暗室。实际测试结果表明,吸波暗室对测试结果的影响不明显,这是由于天线的辐射特性主要是在近场获得的,远场空间环境的影响较小。
3.5. 近远场外推算法
近远场外推算法是整个球面近场检测系统的核心部分,针对被测天线自身尺寸和测试频率,根据采样准则获取球面辐射近场幅度和相位数据,可以导出远近场之间的依赖关系式;最后,利用辐射体全角域近场辐射信息进行外推,获得了远场条件下各个角度辐射特性。本测试系统采用的近远场外推算法借鉴西北工业大学张麟兮等人提出的近场测量中的卷积外推算法 [14],近远场外推算法的具体原理如下。
由电磁场基本理论,远区辐射场的电场强度E可以由矢量磁位A表示为:
(1)
其中
为角频率,
为传播矢量。
由电流源J在距离天线R远的观测点处的矢量磁位A为:
(2)
当辐射源高度尺寸小,可将上式整理成为二维自由空间格林函数的形式:
(3)
若
,则式(3)中的
可以近似为
,进而写成
。根据Hankel函数的叠加性原理,对其进行柱面波基函数展开为:
(4)
将式(4)代入到式(3),得到:
(5)
记
,这是辐射源的归一化傅里叶级数,属于天线的固有特性,与测量距离无关,所以可将式(5)改写为:
(6)
当R0足够大时,即处在天线辐射的远场条件下,根据Hankel函数的大宗近似,由式(6)得:
(7)
结合式(6)和式(7),可推出:
(8)
式(8)带入式(1)即可得远区辐射场表达式。
针对本测试系统,对该算法进行了仿真验证。仿真时选取一长0.5 m的线天线为辐射源,频率2.3 GHz,测试距离为1.5 m。仿真结果如图4所示,可以看到经过三维球面近远场外推的结果与远场理论值相吻合。
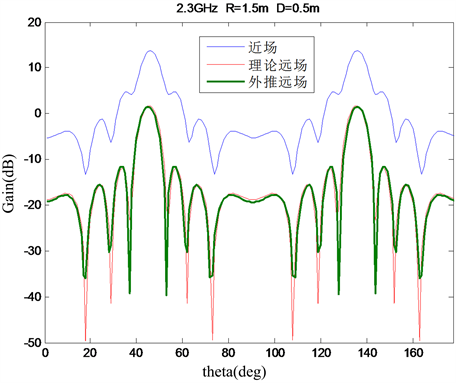
Figure 4. Simulation results of extrapolation algorithm of near-field to far-field
图4. 近远场外推算法仿真结果图
4. 系统校准及误差分析
4.1. 系统校准
对球面多探头近场测试系统,各通道的校准是一个关键过程。本系统的校准是采用一个标准半波振子天线,如图5所示,将标准半波振子的中心与拱形架的中心重合,误差不超过±2 mm。矢网发射信号经过标准半波振子辐射出来,系统通过触发开关矩阵,将各路探头的接收信号传回矢网接收机,分别获得各路的幅度和相位数据。将各路数据存储于计算机中作为校准数据,正式测试时,测试的各路复数数据再与校准数据相除,即可得到校准后的近场测试数据。
4.2. 系统测试误差分析
针对系统测试中的4类主要误差 [15] (环境、截断、校准误差、耦合误差)进行了具体分析。
1) 环境误差:是指测试系统所在的空间的杂波影响测试精度,与吸波材料构造的暗室静区直接相关。按照吸波材料的设计,天线探头的杂波比直达波低70 dB,所以对测试的EIRP误差为0.01 dB。可以忽略不计。
2) 截断误差:由于球面扫描系统只有上半空间,根据仿真分析,由上半球面外推的结果与远场相比,在大于70˚俯仰角角域,截断误差为0.5 dB;在小于70˚的角域,各波瓣峰值误差可满足小于0.1 dB。具体仿真结果如图6所示。
3) 校准误差:是各通道幅度相位的不一致性导致的测试误差。本系统采用标准半波振子进行校准,幅度误差可控制在0.25 dB,相位误差控制在5˚内。按照各通道误差为0.25 dB,带入近远场外推计算,得到EIRP的误差为0.1 dB (近场变换远场是积分的过程,平滑了误差)。
4) 耦合误差:是指从发射天线所辐射的信号经过一个天线散射到另一个天线后被这个天线接收到的信号强度与从发射天线直接辐射来的信号叠加后导致的测试误差,在标准半波振子的校准过程中,耦合误差一并得到了校准,因此该误差可以忽略不计。
综上所述,系统的总误差为:
。
5. 系统测试验证
结合一个实际的S频段相控阵天线,对本测试系统的正确性进行了验证,相控阵天线为3 × 3阵列,工作频点2.3 GHz,阵面尺寸约为220 mm × 220 mm。
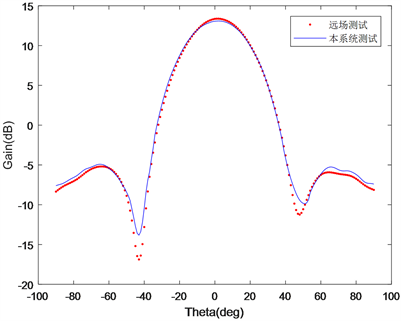
Figure 7. Beam pointing angle for theta = 0˚
图7. 波束指向角theta = 0˚

Figure 8. Beam pointing angle for theta = −10˚
图8. 波束指向角theta = −10˚
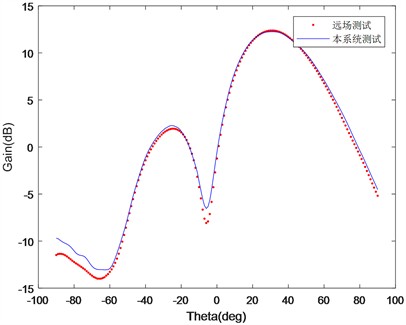
Figure 9. Beam pointing angle for theta = 30˚
图9. 波束指向角theta = 30˚
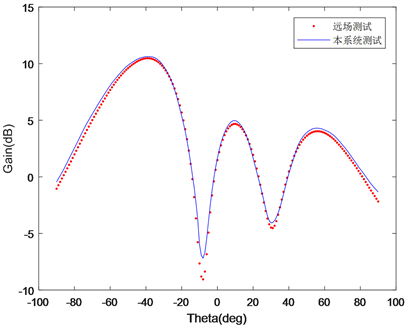
Figure 10. Beam pointing angle for theta = −40˚
图10. 波束指向角theta = −40˚
分别采用远场测试系统和本近场测试系统对相控阵天线不同波束指向的增益方向图进行测试,结果如图7~10所示。从测试结果可以看出,采用本测试系统的的结果和采用远场测试系统的测试结果基本一致,峰值误差不超过0.3 dB,从而验证了本测试系统的正确性。该系统设计简单、成本较低,且测试结果精度较高,可用于相控阵天线等多波束天线的方向图快速测试。
6. 结束语
针对相控阵天线波束多、测试复杂的特点,该文提出了一种简易的天线球面近场测试系统,可以极大地提高相控阵天线的测试效率。经过对比本近场测试系统与远场测试系统的测试结果,说明了本测试系统的测试准确性。该测试系统已成功应用于某型号S频段相控阵天线的测试,同时也可以为其他球面近场测试系统的设计提供指导意义。