1. 引言
换相失败属于LCC-HVDC输电系统中的常见故障,其主要的危害包括直流电流的突增使换流阀电流应力加大、换流变压器直流偏磁及逆变器侧换流母线短时过电压等,若换相失败没有得到有效控制,还会引发连续换相失败,最终导致单极甚至双极停运,使直流传输功率中断。
换相失败的本质是换流阀的关断角γ过小,工程采用半控型电力电子器件–晶闸管,换相后其恢复正向电压阻断能力需要足够时间,时长可用固有极限关断角
来表示。若直流系统受到扰动后,逆变侧换流阀承受反压时间少于
,当加在该换流阀上的电压为正时,该换流阀将重新导通,导致换相失败。引发关断角过小的主要原因包括交流系统中换流母线电压幅值降低和电压过零点偏移两方面 [1] [2] [3]。
低压限流控制环节(voltage dependent current order limiter, VDCOL)是指在某些故障情况下,当发现直流电压低于某一值时,自动降低直流电流调节器的整定值,待直流电压恢复后,又自动恢复整定值的控制功能。设置VDCOL的目的是改善故障后直流系统的恢复特性。其主要作用有:① 避免逆变器长时间换相失败,保护换流阀。② 在交流系统出现干扰或干扰消失后使系统保持稳定,有利于交流系统电压的恢复。③ 在交流系统故障切除后,为直流输电系统的快速恢复创造条件,在交流电压恢复期间,平稳增大直流电流来恢复直流系统 [4]。
目前换相失败的抑制策略主要是减小逆变侧触发角和直流电流整定值,为减小直流电流整定值,工程上常用VDCOL来减小换相失败的概率。
文献 [5] [6] 分析了VDCOL的控制原理及其对HVDC系统的作用,它可以根据交直流电压的大小动态调整直流电流指令值,在一定程度上预防换相失败的发生和改善系统的恢复特性,但电流指令调节灵敏度不够高;文献 [7] 提出了一种非线性动态VDCOL控制策略,根据电压大小动态调节VDCOL控制器的控制曲线;文献 [8] 提出一种基于VDCOL启动电压实时计算的控制算法,该法可以得到缓慢的启动电压,从而达到抑制换相失败的目的。文献 [9] 提出一种基于模糊控制理论的自适应VDCOL控制方法。本文先介绍了国际大电网会议Benchmark模型中整流侧和逆变侧的控制原理,分析Benchmark模型中VDCOL的参数改变对交直流系统的影响,并设置三相接地故障引发系统换相失败,改变VDCOL的参数进行仿真来验证VDCOL的参数改变对交直流系统的影响。
2. Benchmark模型介绍
CIGRE的Benchmark模型是HVDC控制研究的标准模型,常用于电力系统暂态仿真研究中。Benchmark模型是单极两端输电系统,模型的短路比为2.5,是典型的弱交流系统。整流侧和逆变侧都使用12脉动换流器,额定直流电压为500 KV,额定直流功率为1000 MW [10]。
Benchmark模型中,整流侧控制方式为定电流控制、最小触发角控制。逆变侧的控制方式有定关断角控制、定电流控制、低压限流控制、电流偏差控制。
2.1. 定电流控制
定电流控制的结构框图如图1所示,将直流互感器输出的直流电流Id经一阶线性滤波环节
除
去脉动后与电流的给定值Idref进行比较,所得到的误差信号经过PI调节器后,作用于移相控制电路以改变换流器的触发延迟角,实现定电流调节的作用。

Figure 1. Structure block diagram of constant current control
图1. 定电流控制结构框图
在正常运行时,逆变站的定电流调节器并不参与调节。当由于整流站出口侧直流电压发生极大程度的下降或者逆变站出口侧直流电压产生极大程度的上升,导致整流侧转入定最小触发角运行时,逆变侧即转入定电流运行。正常时由整流侧定电流控制决定运行电流,逆变侧定熄弧角控制决定运行电压。两侧交流电压由大的变动时,则由逆变侧定电流控制决定运行电流,整流侧决定运行电压
2.2. 定关断角控制
定关断角控制是将测量到的关断角γ与定关断角γref比较,所得误差信号放大后,对逆变器进行移相控制。定关断角控制控制结构图如图2所示,
的输入要取一个周期的最小值,只要当检测到的最小值满足大于某一定值时,才能保证不会换相失败。在选出最小的
角后经过一个加减环节,用恒定值0.2618 (15˚)和电流偏差控制的输出值之和减去γ角的测量值,其中加减环节中加入恒定值15˚,可以保证
角的最小值大于15˚从而防止发生换相失败。同时
角不可以过大,否则使
过大增加了逆变器的无功功率,所以设置
角限幅环节。在最大值选取环节,输入恒定值为−0.544,换算成角度约为−31˚,再加上前面γ最小角15˚,所以
角的最大值不会超过46˚。超过这一值即进入最大
角控制。

Figure 2. Structure block diagram of constant turn off angle controls
图2. 定关断角控制结构框图
2.3. 电流偏差控制
电流偏差控制(Current Error Controller, CEC)的目的是使逆变侧定
角控制和定电流控制之间能够平稳切换。电流偏差控制是逆变侧控制的一部分,它是定电流和定
角控制之间的辅助控制环节。当逆变侧的电流测量值差值过大时,电流偏差控制器中的函数会输出较大的数值加到定
角控制的加减环节上,从而使
角迅速增大,使得Id迅速上升。其结构框图如图3所示:

Figure 3. Structure block diagram of current error controller
图3. 电流偏差控制结构框图
2.4. 低压限流控制
低压限流环节共同作用于整流侧和逆变侧,但在Benchmark模型中被封装在逆变侧控制器中。低压限流环节的结构框图如图4所示:

Figure 4. Structure block diagram of voltage dependent current order limiter
图4. 低压限流环节结构框图
输入值为逆变侧电压和电流的测量值,经过一阶线性滤波环节
除去脉动,Rv是补偿电阻,例
如在Cigre_Benchmark模型中其值为0.01 (标幺值),用它来补偿逆变侧的电压来得到线路的中点电压,因为VDCOL环节的启动电压为线路中点电压。Idref作为最后的电流整定值是Id0和里的较小值,Id0是人为给定Imax的电流,Imax是经过VDCOL的最大允许电流 。如果不使用进行电压补偿,则送入VDCOL的电流值为逆变侧的电压值,会比实际启动VDCOL的电压值小,系统会过早进入低压限流控制,使电流不稳定 [11] [12]。
常规的VDCOL控制数学模型如图5所示。
图5中Udc表示直流电压;Idc表示直流电流;UL、UH分别表示直流电压处于低水平时和处于高水平时取值;Imin、Imax分别表示对应低水平直流电压时电流取值和对应高水平直流电压时电流取值,其中benchmark模型中VDCOL的参数取值(标幺值)为UL = 0.4、UH = 0.9、Imin = 0.55、Imax = 1,电压、电流的关系
如式(1)所示:
(1)

Figure 5. Mathematical model of VDCOL control
图5. VDCOL控制数学模型
3. VDCOL参数改变对交直流系统的影响
UH减小时,VDCOL的斜率变大,这种情况下则当直流电压较小的情况下才开始抑制直流电流,这样不利于交流母线电压的恢复和电压稳定,但传输的有功功率和和消耗的无功功率都增大,有利于有功的恢复和功角稳定。UH增大时情况相反。
UL增大时,VDCOL的斜率变大,这样则直流电压还较大时,VDCOL的作用便使得直流电流设置为最小值Imin,使得动态过程中直流系统的无功需求不会过高,有利于交流母线电压的恢复和电压稳定;但在直流电压较大时,直流系统的传输功率会降低,不利于快速缓解送、受端交流系统内的功率失衡和功角稳定。UL减小时情况相反。
Imax代表下降时,VDCOL的斜率减小,使得在具有相同直流电压的情况下直流系统输送的功率降低,不利于缓解送、受端交流系统内的功率失衡,但从无功消耗和交流电压恢复的角度来看是有利的。Imax增大时情况相反。系统稳定运行时运行电流为Imax,改变Imax参数值会与定电流控制相矛盾,因此工程上不会改变Imax值。
Imin增大时,VDCOL的斜率减小,对应于相同的直流电压直流电流指令增大,直流线路的输送功率也随之增大,有利于缓解送、受端交流系统内的有功功率失衡和保持系统的功角稳定;但此时直流系统对交流系统的无功需求也相应增加,在某些情况下不利于动态过程中交流电压的恢复和电压稳定。IL减小时过程相反。
4. 仿真验证
为了验证VDCOL参数改变时对交直流系统的影响,在Benchmark模型运行至0.8 s时在逆变侧换流母线处设置一个持续0.1s的三相接地故障,从而引发系统换相失败。VDCOL的初始参数设置为UL = 0.4、UH = 0.9、Imin = 0.55、Imax = 1,在此初始参数下发生故障后,逆变侧直流功率、交流母线电压有效值以及直流电流的波形如图6所示,0.8 s发生三相接地故障,交流母线电压下降,引起逆变侧发生换相失败,逆变站直流侧电压下降,直流电流上升,逆变侧直流功率下降,后在VDCOL的作用下恢复正常。
改变VDCOL的参数大小,同一故障下逆变侧直流功率、直流电压及电流的波形变化规律是一样的,但随着VDCOL参数的改变,同一故障下,直流功率、直流电压及电流受影响的程度发生改变,波形变化的幅度大小有所不同。
同样的,0.8 s时在逆变侧交流母线处施加三相接地故障,在其他参数不变的前提下,分别改变VDCOL的Imin、UH、UL大小,统计不同VDCOL参数下的直流功率最小值Pdmin以及交流母线电压恢复时间t如表1所示(Imax保持值不变)。

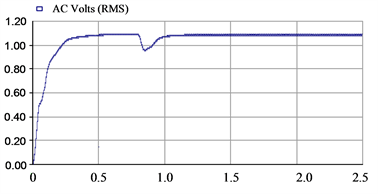

Figure 6. Waveform change curve of DC power, DC voltage and DC current at inverter side under fault
图6. 故障下逆变侧直流功率、直流电压以及直流电流波形变化曲线

Table 1. Statistics of Pdmin and AC bus voltage recovery time (t) under different VDCOL parameters
表1. 不同VDCOL参数下逆变侧直流传输功率最小值Pdmin以及交流母线电压恢复时间t统计
由表1中数据可以观察到:
1) 同一故障时,不同的VDCOL参数组合下,直流系统的最小传输功率Pdmin以及交流母线电压恢复时间t各不相同,说明VDCOL对于故障后发生的换相失败有作用效果。
2) Imin增大,则VDCOL的坡度变缓,直流功率Pd降低的幅度越小,故障发生后交流母线电压的恢复所需时间越长,验证了第2章所述Imin增加的幅度越大,直流线路的输送功率增大,不利于动态过程中交流电压的恢复和电压稳定。
3) UH减小,则VDCOL的坡度增大,直流功率Pd降低的幅度越小,故障发生后交流母线电压的恢复所需时间越长,验证了第2章中所述UH减小的幅度越大,直流线路的输送功率增大,不利于动态过程中交流电压的恢复和电压稳定。
4) UL增大,则VDCOL的坡度增大,直流功率Pd降低的幅度越大,故障发生后交流母线电压的恢复所需时间越长,验证了第2章中所述UL增大的幅度越大,直流线路的输送功率增大,不利于动态过程中交流电压的恢复和电压稳定。
5. 结论
通过在Benchmark模型中进行仿真验证,可知低压限流控制对于直流输电系统逆变侧换相失败能够起到很好的抑制作用,从而有效地防止连续换相失败的发生。当VDCOL的参数发生改变时,对于交直流系统的影响也会有所变化。
Imin增大,则有利于缓解送、受端交流系统内的有功功率失衡和保持系统的功角稳定,直流线路的输送功率增大,不利于动态过程中交流电压的恢复和电压稳定;
UH减小时,则不利于交流母线电压的恢复和电压稳定,但传输的有功功率和和消耗的无功功率都增大,有利于有功的恢复和功角稳定;
UL增大时,则有利于交流母线电压的恢复和电压稳定;但在直流电压较大时,直流系统的传输功率会降低,不利于快速缓解送、受端交流系统内的功率失衡和功角稳定。