1. 引言
煤炭是我国最重要的能源,是我国经济、社会发展基础 [1]。同时,由于煤炭在开采过程中会致使覆岩产生不同程度的损伤,地表沉陷日益加剧,因此煤炭开采所产生的生态成本越来越大。对煤矿开采造成的地表沉陷进行高精度监测,研究地表沉陷发育特征,为更加合理开采煤炭资源,保护矿区生态环境具有十分重要的意义 [2]。
目前矿区地表移动观测普遍存在的困难,即村民不允许在农田里埋设测量点或测点大量丢失,使地表移动观测无法正常进行,导致观测站资料残缺不全,严重制约了“三下”开采的进行。传统的地表观测大多采用全站仪、水准仪等设备对地表的观测点进行平面测量和高程测量 [3]。由于煤矿开采造成的地表移动塌陷是一个三维空间的问题,而利用传统仪器所获取的三维坐标只反映了地表移动的部分点,这种以点带面的研究方法无法获取整个工作面的开采沉陷数据。无人机LiDAR (即三维激光扫描,Light Detection and Ranging的缩写)技术的应用,为地表岩移观测带来了全新的监测手段 [4] [5]。该技术能够快速获得地表采样点的三维空间坐标,已成为空间数据获取的一种重要技术手段;同传统的观测手段相比,该技术不需要合作目标,可以自动、连续、快速的采集数据;拥有快速性,不接触性,实时、动态、主动性,高密度、高精度,数字化、自动化等特点 [6] [7] [8]。其最大特点在于它能够快速、高精度、以非接触方式直接获取物体表面每个采样点的空间三维坐标,得到一个表示实体的点集合,称之为“点云”(point cloud),经过滤波和地面点插值形成DEM,通过多期叠加求差即可获得地表沉陷DEM [9] [10] [11]。LiDAR技术在煤矿区地表沉陷观测时不受光线条件、地形影响,可以进行大范围、高密度空间三维数据采集,点位测量精度高,有效提高野外数据采集效率 [12]。
目前,采用LiDAR技术监测煤矿区地表沉陷取得了较好的效果。李永强等 [13] 将LiDAR技术用于开采沉陷监测,并对点云数据快速处理,有效提高了监测效率。胡大贺等 [14] 将LiDAR用于矿区沉陷监测,监测精度可达到厘米级。梁周雁等 [15] 将LiDAR应用于变形小至厘米级的测量范围,并基于Hausdorff法提取地表沉陷信息。柏雯娟等 [16] 采用LiDAR技术构建沉陷模型,可实现对研究区地表沉陷进行快速高精度测量。于海洋等 [17] 采用LiDAR技术实现了快速确定沉陷区位置,提取沉陷区高精度信息。Zhou Dawei等 [18]、Lian Xugang等 [19] 将LiDAR与全站仪、GPS等相结合,可对矿区地表沉陷、次生地质灾害等进行有效监测。
综上可知,LiDAR技术在矿区沉陷监测方面取得了良好的效果,但大多数研究是基于工作面地表沉陷进行相关研究,对于区域面这种大范围的沉陷监测有待于进一步研究。本文将LiDAR技术应用于地表沉陷观测中,与采用传统观测方法取得的数据对比,探讨LiDAR监测的精度,拟解决设站用地和测点保护难等问题,将经典的点、线研究模式,转换为对区域面的研究,为地表沉陷监测提供一种新的思路。
2. LiDAR的基本原理
机载LiDAR系统组成及原理
1) 系统组成
无人机LiDAR系统主要包括观测平台(飞机等)、动态差分GPS、姿态测量单元IMU、激光扫描测距系统(Laser Range Finder)及多光谱成像仪等,见图1。

Figure 1. Typical composition of Unmanned aerial vehicle LiDAR measurement system
图1. 典型机载激光雷达测量系统组成
其中,GPS模块在整个机载LiDAR系统中发挥三项作用:提供激光扫描装置瞬时位置;提供导航控制数据;与姿态测量装置相结合,构成GPS与IMU复合姿态测量装置以进行GPS和INS数据组合滤波,提高三轴姿态量测精度。一般地面需布设多个基站来形成差分GPS,随着全球导航卫星系统及相关技术的完善,单点定位(Precise Point Positioning, PPP)、单基站(CORS)的作业模式表现出很大的优势,卫星定位已经成为获取空间基础信息的重要支撑。
姿态测量单元有些也称为惯性导航系统INS,利用陀螺和加速度计来确定扫描时的瞬时姿态等信息。
激光扫描测距系统通过向扫描对象主动发射激光束来获取扫描系统至扫描对象的距离信息、回波信息、强度信息等。然而,单束激光反映的信息是有限,大多情况下,希望能够获得更多的、密度更大的激光脚点,以期更详细的反演扫描区域。目前,借助机械、光学等装置实现的典型扫描方式有摆镜扫描、旋转多面镜扫描、旋转正多面体及纤维光学阵列扫描,其形成的激光脚点分布如图2所示。

Figure 2. Laser point distribution of different scanning modes
图2. 不同扫描方式的激光点分布
为了避免激光雷达作业方式的限制,在机载LiDAR系统中安置的成像设备主要是用于获取扫描区域的地物地貌真彩色或红外数字影像,以满足后续数据处理中对地表光谱、纹理等的需求。
2) 工作原理
LiDAR是利用激光测距原理确定目标空间位置的新型测量仪器,属于主动遥感。按工作方式,可将LiDAR系统分为脉冲式、相位式和光学三角式,目前使用最多的是脉冲式激光雷达。
机载激光雷达测量对地定位原理示意图如图3所示。对于一个空间向量S,其模为S,方向为(ψ,ω,κ),当该向量的起点坐标已知时,则其另一端点的坐标便可计算得出。在机载激光雷达测量系统中,向量的起点由动态差分GPS或精密单点定位技术来确定;向量的方向信息由包含陀螺仪、加速度计的姿态测量单元测定;向量的模则通过激光测距系统来测定。当然在实际应用之前,应考虑到系统的安置偏差等参数并进行校正。

Figure 3. Principles of ground positioning of LiDAR
图3. 机载激光雷达对地定位原理
3. 许厂煤矿采煤沉陷监测
本文以济宁市许厂煤矿地表沉陷监测为背景,结合煤矿地表下沉的特点,对矿区回采的工作面进行分析,探究地表在工作面开采进行中的沉陷发展规律,分析地表沉陷影响因素,验证传统测量得出的结论,对工作面的进一步开采奠定基础,保证开采的安全性。
3.1. DEM构建技术线路
DEM,即数字高程模型,是数字化表达地面起伏形态的一种数据组织。DEM依结构形式可分为方格网模型、TIN模型和混合模型。方格网模型是基于固定的间距等,由邻域点云高程内插方格网上的高程构建的。
鉴于获取的研究区点云分布和密度,本文选择构建0.5 m × 0.5 m分辨率的DEM方格网模型。需要进行 DEM数据内插和重采样,插值采样的结果是生成一个连续的表面。此操作属于栅格插值的一种。需要指出,如果栅格数据的来源不同,进行空间分析时其分辨率不匹配,为生成统一分辨率的DEM格网,需要进行DEM栅格数据的重采样。
使用经过精度评定的机载雷达点云数据,进行点云抽稀,同时在目标区域建立地表0.5 m分辨率的DEM,见图4。

Figure 4. Generate a DEM map of the ground
图4. 生成地面DEM图
3.2. 多期DEM匹配与叠加分析
以原始地面为基准,与最后一期DEM叠加分析,获得测区沉降值,形成测区沉降图,见图5。

Figure 5. Analysis diagram of DEM matching and superposition
图5. DEM匹配与叠加分析图
将处理好的DEM匹配与叠加分析图导入Global Mapper分别形成观测区沉降色阶图及观测区开采沉陷等值线图,进一步进行开采沉陷分析,见图6~8。
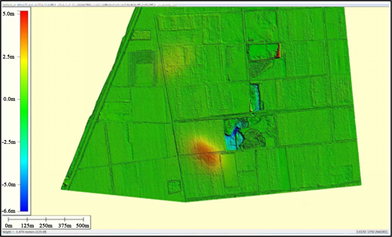
Figure 6. Color scale map of subsidence in observation area
图6. 观测区沉陷色阶图

Figure 7. Contour map of mining subsidence in observation area
图7. 观测区开采沉陷等值线图
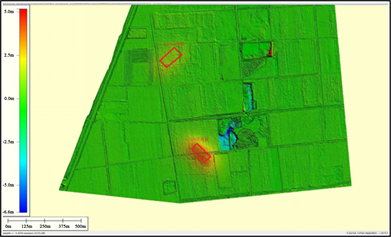
Figure 8. The upper and lower comparison of the mining subsidence in the observation area
图8. 观测区开采沉陷井上下对照图
由上图可知,观测区共计形成两个沉降中心,一个位于观测区南部3309工作面上方,一个位于观测区西北部的3326工作面上方。
3.3. DEM观测线特征分析
通过线性内插与匹配方式,筛选监测范围内采空盆地。随后通过不动剖面匹配的方法,建立测区观测线,见图9。
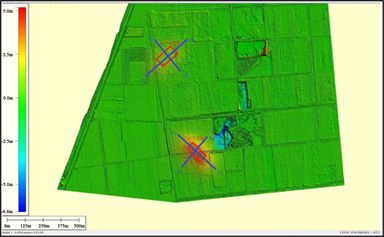
Figure 9. Surface subsidence monitoring line layout of working face
图9. 研究区工作面地表沉陷监测线布置图
通过点云数据生成地面数字模型(DEM),通过对比各期间DEM数据间高差值,以此完成累积沉降值、期间沉降速率等基础数据采集。
多期DEM剖面分析是建立在多期数据间相互匹配已完成的基础上来进行的,但是多期DEM剖面分析一般是对典型区域所进行的研究。在研究对象周围选取适当数量不变的区域,拉取剖面,完成多期DEM的匹配。本文选取工作面走向和倾向剖面,获取不同期次DEM间相同剖面的差异,研究其变化,获取变化量等。筛选原始、最后第二期、最后一期数据后,绘制沉降剖面图,如图10,图11。


Figure 10. P1~P2, P3~P4 profile measurement effect of Xuchang Coal Mine
图10. 许厂煤矿P1~P2、P3~P4剖面测量效果图
由重点观测区域内剖面测量曲线图可知,P1~P2、P3~P4观测区域内,最大下沉点发生在B26,最大沉降量为3.650 m。最后两期观测数据间最大沉降量145 mm,表明3309工作面仍处于活跃期。
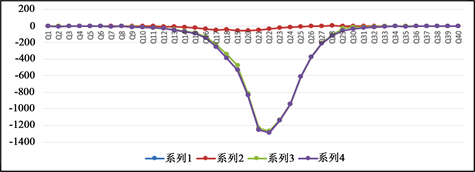
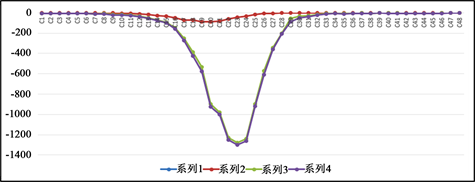
Figure 11. Q1~Q2, Q3~Q4 profile measurement effect of Xuchang Coal Mine
图11. 许厂煤矿Q1~Q2、Q3~Q4剖面测量效果图
由重点观测区域内剖面测量曲线图可知,Q1~Q2、Q3~Q4观测区域内,最大下沉点发生在C23,最大沉降量为1300 mm。最后两期观测数据间最大沉降量为26 mm,下沉速率小于1.67 mm/d,表明3326地表进入衰退期。
4. 观测成果对比
在3326工作面地表布设常规观测站,采用全站仪和四等水准测量分别进行测点平面坐标和高程监测。沿工作面中央地表布设走向观测线Q1Q2,距开切眼510 m,布设倾向观测线,Q1Q2观测线与Q3Q4观测线相互垂直。
在3326工作面地表上分别在道路、农田、村庄和水塘选取四个点,利用这四个点在不同方法中测得的累计沉降值,对比常规测量和采用LiDAR方法取得的成果,见表1。由表1可知,无论是相对平坦简单的地形,还是复杂多变的地形,采用传统的常规测量和采用LiDAR监测的数据基本相符。因此,采用无人机LiDAR技术监测的地表沉陷数据精度满足要求。

Table 1. Comparison table of results obtained by different observation methods
表1. 不同观测方法取得成果对比表
5. 结论
1) 利用全新的机载LiDAR监测手段,快速获得物体表面采样点的三维空间坐标,对重点采区进行了高效精细化监测,能够获得地面三维模型,为安全开采提供了技术支持。
2) 通过常规岩移观测技术与机载LiDAR点云数据处理等两种手段对许厂煤矿矿区地表岩移及变形进行了数据采集与规律分析,验证了机载雷达云数据处理的有效性和快捷性。
3) 采用LiDAR技术不仅适用于工作面地表沉陷监测,对采区等大面积地表沉陷也可以有效监测。
参考文献