1. 引言
中低速磁浮列车作为一种新型的轨道交通形式,以低噪声、无污染、能耗低、速度快、爬坡能力强、转弯半径小等优势,较为适合于城市轨道交通。磁浮列车是通过电磁力达到无接触的悬浮、导向和驱动的车辆系统,悬浮电磁铁作为磁浮列车走形机构的关键部件,对其电磁特性的深入研究关系到列车运行的安全性、稳定性、可靠性。
对于悬浮电磁铁的电磁特性分析,国内学者也作了很多相关研究。詹佳雯 [1] 建立了悬浮电磁铁3D有限元模型,研究了横向偏移、励磁电流对电磁力的影响;刘慧敏等 [2] 对悬浮电磁铁二维有限元分析,搭建二维简化模型,探究了悬浮力与悬浮间隙在不同励磁电流下的关系;刘少克等 [3] 建立悬浮电磁铁三维数值模型,仿真分析了在磁铁发生位置变化时导向力和悬浮力的变化情况。罗芳等 [4] 建立了悬浮电磁铁二维有限元模型,对电磁场进行二维有限元分析,得到了在起浮工况和额定工况下励磁电流、磁力线分布和磁场饱和状态等数据。
可以看到,对于电磁特性的分析方法主要是建立二维或三维的有限元模型,通过对悬浮电磁铁施加电流激励,探究其各项参数间的变化关系。本文采用的是建立3D有限元模型,设计了两种不同规格的铁芯尺寸和线圈材料,通过对比仿真,探究在额定工况下保证悬浮力不变时,励磁安匝数、导向力、导向刚度与磁极侧向偏移距离之间的变化关系,以及起浮工况下悬浮电磁铁所需的励磁安匝数与额定工况下所需励磁安匝数的数量关系。
2. 磁浮车辆动力学建模
2.1. 车辆结构原理
中低速磁浮列车一般采用三节编组,每节车辆包含两个主要组成部分:车体和走形机构。走形机构的作用类似轮轨交通车辆的转向架,用于支承车体并传递载荷与各种作用力。5个悬浮架模块共同组成走形机构,如图1所示,悬浮架的作用是装载悬浮电磁铁,并通过滑台、迫导向机构等二系悬挂系统与车体相连接,将悬浮力、导向力、牵引力以及制动力传递至车体 [5]。单个悬浮架模块主要由4套托臂、2套纵梁、2套抗侧滚梁、2套牵引拉杆装置和2套悬浮电磁铁模块组成,如图2所示。
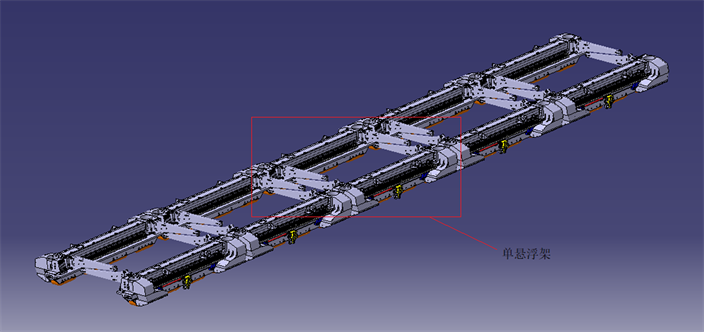
Figure 1. Bogie structure of maglev vehicle
图1. 磁浮车辆走形机构
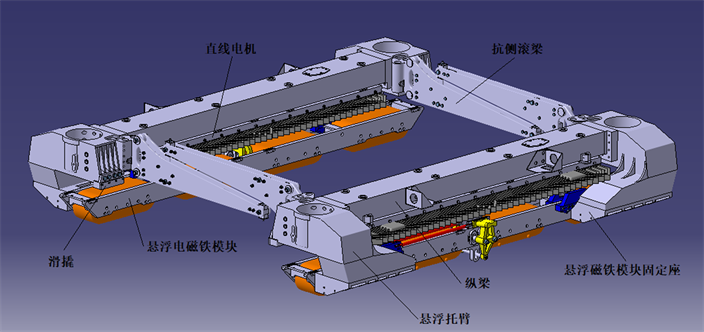
Figure 2. Single suspension frame structure
图2. 单个悬浮架结构
当列车在线路上运行时,由于轨道不平顺、侧向风干扰等因素的影响,悬浮架与轨道之间的位置状态会发生变化,尤其是在通过小半径曲线时,又叠加受到离心力、重力横向分力、二系悬挂力等的共同作用,悬浮电磁铁磁极与F轨之间的相对位置会产生较大的变化。极面间磁场的变化会使得悬浮力和导向力不能满足车辆的动力学要求,严重时甚至会出现掉点等情况,对于磁浮列车的运行安全性有较大的隐患,所以对列车曲线通过时悬浮电磁铁的电磁特性研究具有重要意义。
2.2. 动力学建模
磁浮车辆动力学模型的建立利用的是多体动力学仿真分析软件SIMPACK,在开始搭建模型前,首先对磁浮车辆各个构件之间的连接构造方式及各构件间相对自由度进行分析,得到车辆的拓扑结构示意图,如图3所示。图中最下方的横线代表轨道面,悬浮架通过电磁吸力浮于轨道面之上,悬浮架与车体之间由空气弹簧悬挂系统连接,主要包含空气弹簧和滑台两个构件。从横向视图可以看到,每个滑台坐于两个空气弹簧之上,滑台共有六位,其中1、3、4、6位为滑动滑台,车体与悬浮架之间有横向平动的自由度;2和5位为固定滑台,与车体固结在一起。从纵向视图来看,悬浮架左右两侧纵梁之间由抗侧滚梁连接,两片抗侧滚梁之间由两个吊杆连接,存在竖向平动及绕纵向转动的自由度。
此外,由于磁浮车辆是一个复杂的系统,为了避免在仿真分析中计算机出现内存不足而卡顿死机的情况,对车辆模型作适当的简化,将车体、悬浮架各模块、悬浮电磁铁及F轨等视为刚体,忽略其自身的弹性形变;将空气弹簧及抗侧滚梁吊杆等效为弹簧阻尼元件 [6]。
车辆模型的搭建主要分三个部分:首先建立悬浮架模块,使用弹簧阻尼元件模拟悬浮磁铁产生的电磁吸力,利用移动标志点(作用等同于轮对)来模拟磁浮列车沿轨道的运动;然后将车体模型简化为一个具有6个自由度的刚体,定义好标志点并建立迫导向机构模型;最后为了减少重复性工作量,可将悬浮架模块作为子模块导入车体模型中,重复5次后得到磁浮车辆整车动力学模型,如图4所示。
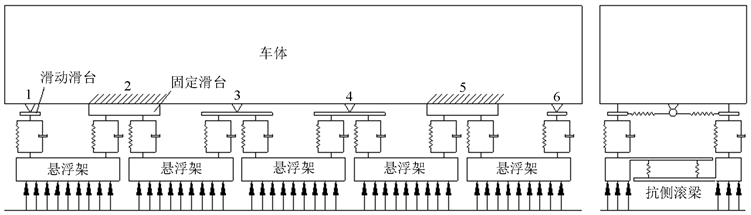
Figure 3. Vehicle topology diagram [6]
图3. 车辆拓扑结构图 [6]
3. 悬浮电磁铁技术特征及原理分析
悬浮电磁铁通电产生电磁吸引力,用于将磁浮列车吸引至与轨道无接触的状态。不同于常导磁吸式高速磁浮安装有独立的导向电磁铁,中低速磁浮列车采用的悬浮电磁铁是同时具备悬浮和导向功能的U型磁铁以及配套的F型悬浮导轨。每节车5个悬浮架模块共10个电磁铁,每个电磁铁上安装有4个铁芯,绕制四组相同的线圈。
3.1. 悬浮电磁铁结构
悬浮电磁铁装置由托臂连接件、内外侧极板、横向止挡滑橇、垂向防吸死滑块、磁轭、极板间支承、以及若干传感器安装座组成 [7],电磁铁及部件总装三维模型示意图如图5所示。
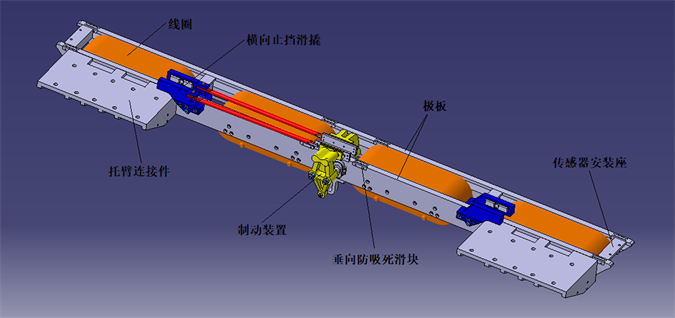
Figure 5. Schematic diagram of suspension electromagnet assembly
图5. 悬浮电磁铁总装示意图
3.2. 悬浮控制及导向原理
悬浮系统作为中低速磁浮列车上的关键系统,肩负着列车起浮与运行中稳定悬浮的重要任务。悬浮控制技术是悬浮系统中最为核心的一项技术,它主要包含两个主要装置:悬浮传感器和悬浮控制器。悬浮传感器用于测量电磁铁与F轨间隙大小及垂向加速度信号,悬浮控制器接收到传感器信号后根据悬浮间隙的给定值对悬浮电磁铁的励磁工作电流做出及时调整,电流变化引起磁场变化使得电磁力发生变化,使悬浮间隙保持在允许的范围内。中低速磁浮每节车的走形机构有5个悬浮架,对应装配了20个悬浮控制器,每个悬浮控制器控制半个电磁铁(即两个电磁铁线圈),一节车的悬浮控制系统配置如图6所示。
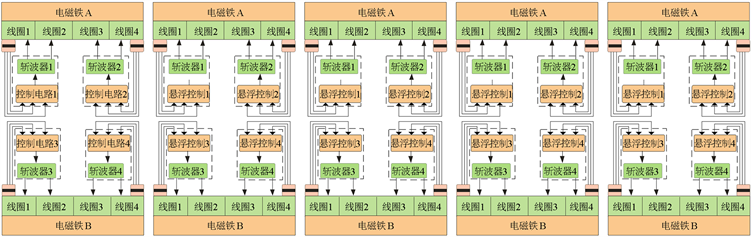
Figure 6. The suspension control system configuration of single vehicle [7]
图6. 一节车的悬浮控制系统配置 [7]
中低速磁浮列车在垂向上设置有多个悬浮间隙传感器,由悬浮控制器对垂向悬浮进行主动控制。而在横向上的导向采用的是被动控制,当列车通过曲线时,悬浮电磁铁发生横向位移,如图7所示,由于磁力线发生倾斜,电磁力在垂向和横向上分为两个分力,垂向的悬浮力使列车悬浮,而横向的导向力也称为复原力会促使电磁铁回到正确的位置,达到导向的目的。
4. 电磁模型建立及仿真分析
悬浮电磁铁电磁模型的建立利用的是ANSYS Maxwell,该软件在磁场分析中既可以建立二维模型也可以建立三维模型,在分析工业电磁元件中应用较为广泛。
4.1. 电磁模型
在本节的分析中,建立的是三维分析模型。根据实际的需要,建立了两种不同底铁尺寸下的模型,具体参数规格如表1所示,主要区别如下:
1) 规格1 (励磁线圈用铜扁线):420 mm (底铁长度) * 56 mm (底铁高度);
2) 规格2 (励磁线圈用铝箔):390 mm (底铁长度) * 60 mm (底铁高度)。
建模的时候,在基本不影响磁路的基础上,作了适当的简化。一方面,根据磁极模块的对称性,只建立两个线圈的半磁极模块模型;另一方面,对F铁和磁极铁芯的圆角进行钝化处理(方便剖分),具体的模型如图8所示。

Table 1. Electromagnetic design parameters of suspension electromagnet
表1. 悬浮电磁铁电磁设计参数
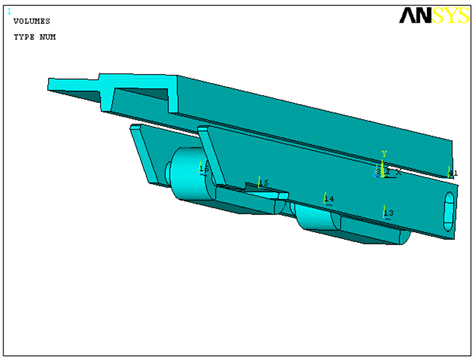
Figure 8. 3D finite element model of floating electromagnet (half)
图8. 悬浮电磁铁三维有限元模型(半个)
4.2. 电磁仿真结果
4.2.1
. 磁极侧向偏移分析
在列车实际运行中,通过曲线工况时,悬浮电磁铁磁极与F轨的相对位置关系是复杂多变的,在空间内有六个运动自由度,分别是沿横向、纵向和垂向的平动,以及绕三个坐标轴的侧滚、俯仰和偏航运动。为了便于分析,将模型简化为仅考虑横向平动,即磁极侧向偏移时的工况。在保证悬浮力不变的情况下,改变侧移量的大小,可以得到各工况下两种不同规格电磁铁的励磁安匝数大小、导向力大小及导向刚度大小。具体仿真结果如图9,图10,图11所示。
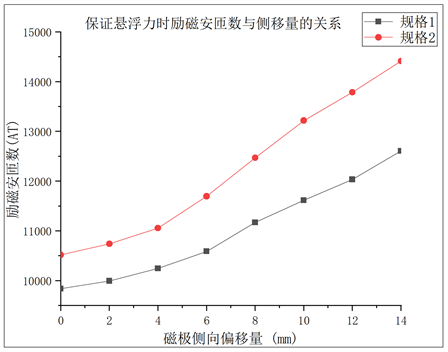
Figure 9. The relationship between ampere-turns and side shift when ensuring the suspension force
图9. 保证悬浮力时安匝数与侧移量的关系
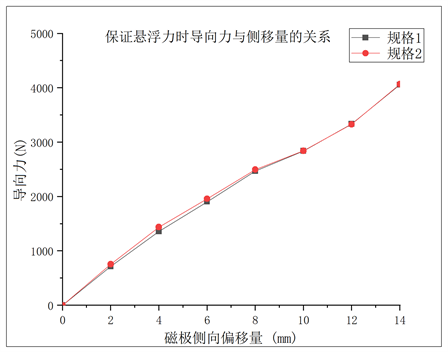
Figure 10. The relationship between guidance force and side shift when ensuring the suspension force
图10. 保证悬浮力时导向力与侧移量的关系
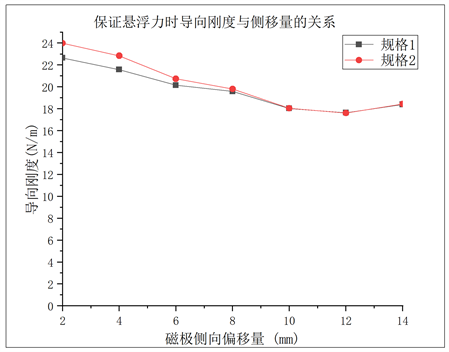
Figure 11. The relationship between guidance stiffness and side shift when ensuring the suspension force
图11. 保证悬浮力时导向刚度与侧移量的关系
由图可知,磁极发生侧向偏移时,在保证悬浮力的情况下,励磁电流和导向力的大小均随偏移量增大而增大,而导向刚度随偏移量增大呈下降趋势。比较两种规格电磁铁可知,在磁极侧向偏移一定时,规格2电磁铁所需励磁电流远大于规格1电磁铁,究其原因,初步认为是线圈材料和铁芯尺寸两方面因素共同作用导致的;而导向力与导向刚度差别不大,这是因为中低速磁浮列车采用被动导向,导向力是电磁吸力在横向的分力,其大小受悬浮力的影响,而与线圈材料和铁芯尺寸无关。
另外选取磁极无侧向偏移和磁极偏移14 mm两种工况,对悬浮电磁铁的磁场分布情况进行有限元分析,可以得到磁场分布情况如图12,图13所示。由磁场分布云图可以看出,内外侧极板上靠近线圈部分较远离线圈部分的磁感应强度更大;当磁极无侧移时,可以看到在同一位置上的磁感应强度规格2电磁铁比规格1电磁铁较大,且当磁极发生侧移时,电磁铁整体磁感应强度都急剧增加,这是由于通入线圈的励磁电流增大引起感应磁场的强度增大所导致的。
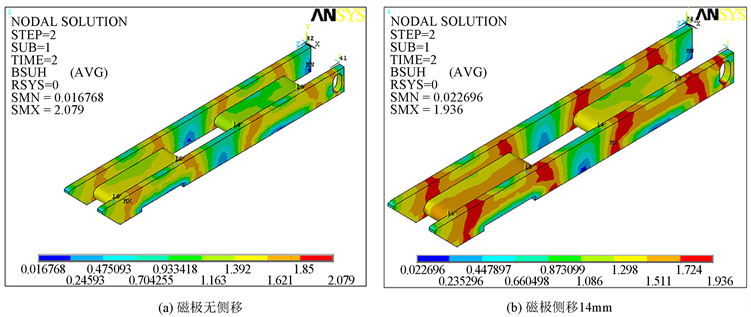
Figure 12. Magnetic field distribution of Size 1 electromagnet
图12. 规格1电磁铁磁场分布图
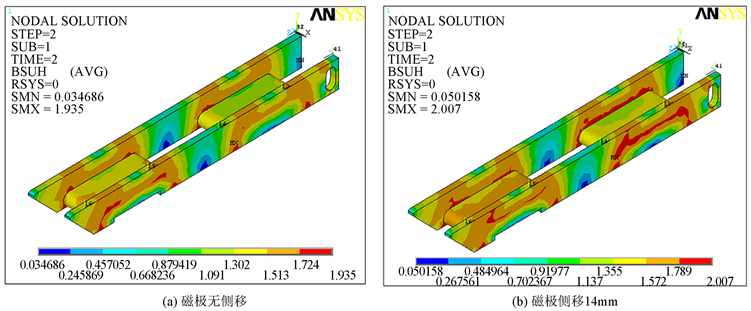
Figure 13. Magnetic field distribution of Size 2 electromagnet
图13. 规格2电磁铁磁场分布图
4.2.2. 起浮工况仿真
理论上,设计起浮间隙是稳定悬浮间隙的2倍,稳定悬浮气隙长度为8 mm,起浮气隙长度为16 mm,根据公式:
起浮时的励磁电流是稳定悬浮时悬浮电流的2~3倍(考虑向上加速度)。经仿真分析得到的起浮工况励磁安匝数如表2所示。
Table 2. Ampere-turns under floating conditions
表2. 起浮工况下的安匝数
规格1 (420 * 56)的电磁铁要在起浮时产生2吨/沿米的悬浮力,需要的励磁安匝数为23,704安匝,约为8 mm时产生相同悬浮力所需安匝数的2.409倍;规格2 (390 * 60)的电磁铁要在起浮时产生2吨/沿米的悬浮力,需要的励磁安匝数为33,138安匝,约为8 mm时产生相同悬浮力所需安匝数的3.15倍。之所以规格2电磁铁(短铁芯)所需励磁电流远大于规格1电磁铁(长铁芯),初步认为是由于侧板磁饱和后到某一程度后,增加励磁电流对悬浮力的影响很小。
5. 结论
根据上面的仿真分析结果可以得出以下结论:
1) 当悬浮电磁铁相对F轨发生横向偏移时,所需的励磁电流和导向力都随偏移量增加而增大;
2) 对比分析两种规格电磁铁的电磁仿真特性,可以得出,采用铜扁线作为线圈材料且铁芯尺寸为420 mm * 56 mm的电磁铁,达到相同的工况所需的励磁电流均远小于采用铝箔为线圈材料的电磁铁,从节能和安全方面考虑,应选用规格1电磁铁作为中低速磁浮列车电磁铁方案。
本文通过增设一组对比试验规格的悬浮电磁铁,利用Maxwell对悬浮电磁铁进行三维有限元建模并对比仿真,分析总结了悬浮电磁铁各关键参数与其电磁特性之间的影响关系,得到了一些有价值的结论,对悬浮电磁铁设计参数的优化提供了一定的技术支持。
目前国家正推动新一代160~200 km/m中速磁浮列车的研发,悬浮系统作为其中的核心技术在更高的速度等级下必然面临更大的挑战,对于悬浮电磁铁电磁特性的研究也会得到更广阔的发展和应用。