1. 引言
时间积分法是求解结构动力学响应强有力的方法之一,它的基本思想是将时间域离散,通过迭代格式求出各离散时刻的物理量近似值。经典时间积分法有Houbolt方法 [1] ,Newmark方法 [2] ,Wilson-θ方法 [3] ,Hilber-Hughes-Taylor-α方法 [4] 和Wood-Bossak-Zienkiewicz-α方法 [5] 等,上世纪九十年代以来也出现了诸多新颖的时间方法,例如Zhai方法 [6] ,广义-α方法 [7] ,Bathe方法 [8] 和基于加权残量思想的方法 [9] 等。但这些方法大都只有二阶精度,需要使用非常小的步长才能实现高精度要求,导致大量的计算量。
对于线性定常系统,钟 [10] 提出了精细积分方法(Precise Integration Method, PIM),以其高精度,高效率等优点得到了广泛应用。PIM的基本思想是对微分方程的解析解进行精确数值计算,对于齐次方程,PIM可以给出计算机精度的解。而对于非齐次方程,需要求解非齐次项产生的Duhamel积分,钟 [11] 和林 [12] 就非齐次项分别为多项式、弦函数、指数函数以及它们的组合形式时,推导了相应的精细积分递推格式,后来又发展了很多种非齐次项的积分方法,例如直接对非齐次项Duhamel积分进行数值积分求解 [13] ,或者增维精细积分方法 [14] 等。当用于求解结构动力学响应时,PIM是一种条件稳定算法 [15] ,它的精度会随着展开项的增多而提高。
本文借助PIM中使用的指数矩阵乘法和存储增量的技术,基于Fox-Goodwin方法 [16] 构造高精度时间积分法Highly Accurate Fox-Goodwin time Integration Method (HAFIM)。Fox-Goodwin方法是一种辛几何算法,对于无阻尼系统可实现四阶精度,并且具有足够的稳定区间。对于收敛的算法来说,当步长趋近于0时,数值解趋近于解析解。HAFIM的思想是将每个时间步长N等分,在每一个分步内使用Fox-Goodwin方法,通过连乘每分步的Jacobi矩阵计算出单步的高精度Jacobi矩阵,利用该Jacobi矩阵进行迭代求解。在构造高精度Jacobi矩阵的过程中,2m算法和增量算法分别被用来减少计算量和降低舍入误差。与PIM相比,HAFIM具有更简单的矩阵形式和更优秀的数值性能。
2. 算法格式
2.1. 动力学方程
结构动力学方程的一般形式为
(1)
式中,M,C,K分别为质量,阻尼和刚度矩阵,
,
,x分别为加速度,速度和位移向量,R(t)为外部激励。若R(t)可表示为一系列基本函数的组合,且这些函数可以用其本身和一阶和二阶导数线性表出,即
(2)
则可使用增维的方式将外载荷函数转化为待求变量,从而将非齐次方程(1)转化为齐次方程
(3)
式中,I为单位矩阵,O为零矩阵。下面给出最一般的转化方式。
在有限时间内,任意连续函数都可展开成傅里叶级数的形式,则R(t)可近似表示为
(4)
式中,T0为R(t)的基本周期,a0,an和bn为傅里叶系数,q为展开项数。若令
(5)
则任意函数均可近似转化为方程(2)的形式。特别地,如果外激励函数本身是二阶齐次常微分方程的解,如常激励,简谐激励,或它们的组合形式等,方程(2)可严格满足。
基于以上讨论,本文仅关注齐次方程的求解,即
(6)
式中
(7)
2.2. 求解格式
时间积分法求解方程(6)的简明递推格式为
(8)
式中,A为Jacobi矩阵或称为传递矩阵,zk为在时间点
的状态向量,h为时间步长。本文采用Fox-Goodwin方法,其差分格式为
(9)
则对应的Jacobi矩阵为
(10)
HAFIM用多分步的思想,将步长h等分为N份,在每个分步内使用时间积分法,则其递推格式可写为
(11)
式中,AH为高精度Jacobi矩阵,可由各分步的Jacobi矩阵连乘得到,即
(12)
式中,分步长
。在构造AH的过程中,2m算法和增量算法可分别用来减小计算量和计算机舍入误差。
1) 2m算法
取
,如
,
,则仅需m次迭代就可得到AH,相当于执行下列语句
(13)
2) 增量算法
当hN很小时,A(hN)与单位矩阵十分接近,可写为
(14)
式中,S(hN)为增量矩阵
(15)
可以看出,当hN趋近于0时,S(hN)接近于零矩阵。由于一般台式计算机仅有16位有效数字,S(hN)的精度可能会在迭代过程中丧失殆尽。为避免精度损失,在构造AH的过程中,要单独存储S(hN),而不是A(hN)。又因为
(16)
则需执行的语句变为
(17)
经过m次乘法后,S不再是一个很小的矩阵,此时AH可由下式得到
(18)
综上所述,表1给出了HAFIM求解线性定常系统的执行步骤。在计算过程中,HAFIM与PIM有两处不同:首先,HAFIM直接给出了增量矩阵S(hN)的形式,而PIM的增量矩阵需由系数矩阵进一步计算得到;其次,HAFIM无需对结果进行变换,可直接求得位移、速度和加速度,而PIM的速度和加速度需由进一步变换得到,所以说HAFIM计算更为简便,所需时间成本也更低。
实际上,任意一种时间积分法都可按照同样的方式来构造相应的高精度方法,本文选取Fox-Goodwin方法是由于其具备良好的精度和稳定性,下面我们将说明这种方法的性能优势。

Table 1. Solution procedures of the highly accurate Fox-Goodwin time integration method
表1. 高精度Fox-Goodwin时间积分方法的执行步骤
3. 算法性能
衡量算法性能优劣的指标主要有稳定性和精度两个方面。对于线性定常系统,由于模态正交性,可以通过对单自由度系统问题的分析来说明算法的特性,即振动方程为
(19)
式中,ξ和ω分别为阻尼率和固有频率。为避免参数N的影响,这里仅研究Fox-Goodwin方法本身的性质,并与梯形法则(Trapezoidal-Rule, TR),中心差分法(Central-Difference-Method, CDM)和PIM进行对比。TR和CDM是结构动力学中常用的时间积分法,对无阻尼系统不具有数值阻尼,精度较高。
3.1. 稳定性
稳定性要求算法的谱半径
。对于单自由度方程(19),Fox-Goodwin方法的Jacobi矩阵为
(20)
式中,
。类似地,TR和CDM的Jacobi矩阵分别如下
(21)
(22)
而PIM的性质随着展开项数的增多而不同,这里给出最常用的两种情况:
1) L = 3
(23)
2) L = 4
(24)
式中L表示截断阶数,而
(25)
图1和图2分别给出了无阻尼情况和阻尼率为0.1时这几种方法的谱半径曲线。可以看出,TR为无条件稳定算法,其余方法均为条件稳定方法,Fox-Goodwin方法的稳定区间介于两种精细积分法之间。为方便应用,表2给出了这三种方法的稳定极限τcr,当
时,算法可以给出稳定的结果。
3.2. 精度
考虑单自由度系统(19),该问题的解析解为
(26)
式中,c1和c2为由初始条件确定的常数,
。而数值解的形式为
(27)
式中
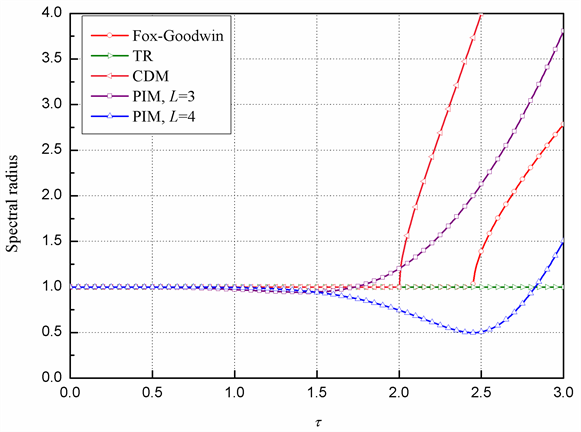
Figure 1. Spectral radius ( ξ = 0)
图1. 谱半径曲线( ξ = 0)
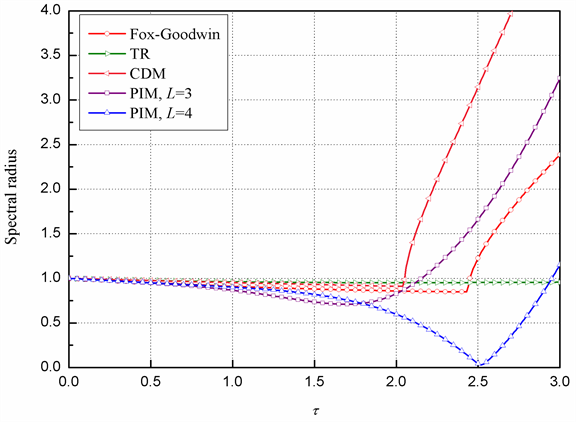
Figure 2. Spectral radius (
= 0.1)
图2. 谱半径曲线(
= 0.1)
Table 2. The stability limits of these methods
表2. 算法的稳定极限
(28)
在稳定区间内,λ1,2为一对共轭复根。将数值解的形式与解析解对比,我们可以用
来表示数值耗散的程度,称为幅值衰减率。而数值弥散一般用周期延长率来表示,定义为
(29)
图3和图4分别给出了这几种格式的幅值衰减率和周期延长率曲线,结果表明无阻尼情况下,PIM的幅值精度较差,TR和CDM方法的相位精度较差,而Fox-Goodwin方法的幅值和相位精度皆优于其它方法,因此本文选用Fox-Goodwin方法来构造高精度时间积分法。特别地,由于Fox-Goodwin方法的辛几何特性,其幅值衰减率为零,这意味着幅值误差不会随着步数的增多而累积,对长期仿真十分有利。
4. 数值仿真
考虑三自由度无阻尼质点-弹簧系统,如图5所示。弹簧的刚度系统均为k = 1 N/m2,质点的质量均为m = 1 kg,质点1处受到简谐激励R = 10sin5t N作用,系统的运动方程为
(30)
令
,则方程(28)可转化为齐次方程
(31)
初始条件为
(32)
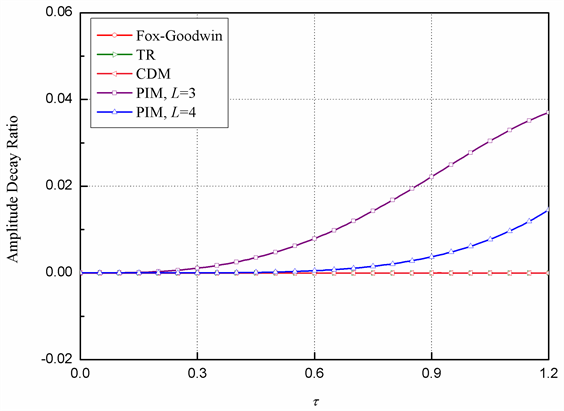
Figure 3. Amplitude decay ratio ( ξ = 0)
图3. 幅值衰减率曲线( ξ = 0)
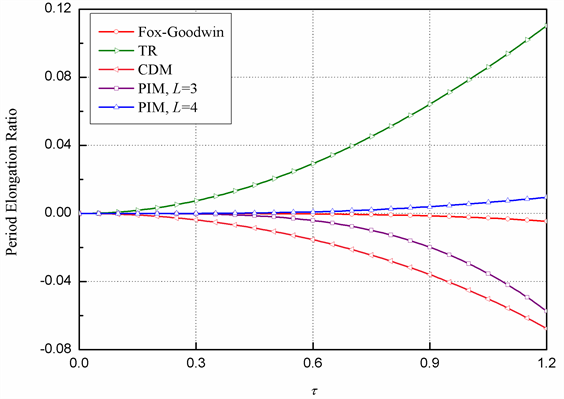
Figure 4. Period elongation ratio ( ξ = 0)
图4. 周期延长率曲线( ξ = 0)
在本例中,由于激励为简谐函数,齐次方程(29)与原方程(28)的解析解完全相同。
简谐激励周期为
,因此采用的时间步长选为
,令
,应用HAFIM和PIM (L = 3, L = 4)计算了该系统在[0, 40 s]内的位移,速度和加速度响应。质点1的结果如图6~8所示,其中精确解由模态叠加法得到。可以看出,由于HAFIM的保辛特性,其幅值误差不累积;而经过一段
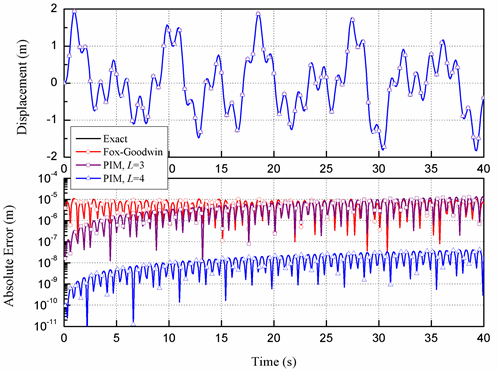
Figure 6. Displacement and the absolute errors of the methods at node 1
图6. 质点1的位移响应和数值方法的绝对误差
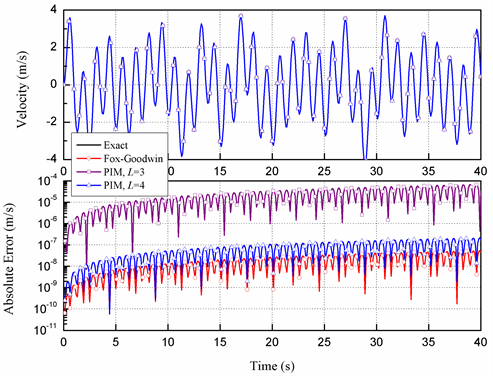
Figure 7. Velocity and the absolute errors of the methods at node 1
图7. 质点1的速度响应和数值方法的绝对误差
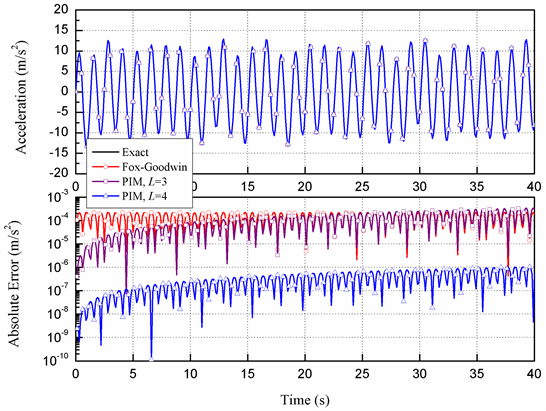
Figure 8. Acceleration and the absolute errors of the methods at node 1
图8. 质点1的加速度响应和数值方法的绝对误差
时间后,PIM的幅值耗散会大大降低结果的精度,尤其是位移和加速度响应更加明显,因此HAFIM对长期仿真十分有利。此外,虽然PIM的位移精度较高,但其速度精度较差,即使是截断到第4阶(L = 4),其速度误差也远大于HAFIM给出的结果。
5. 结论
本文构造了高精度Fox-Goodwin时间积分法。它的基本思想是将每个时间步等分为N份,连乘每个分步的Jacobi矩阵构造高精度Jacobi矩阵,然后使用高精度Jacobi矩阵进行递推求解。在构造高精度Jacobi矩阵的过程中,2m算法和增量算法被用来提升计算效率,减小舍入误差。
相比较于精细积分法来说,本文提出的方法结合了时间积分法本身的优势,使得其在计算量和性能上得到优化。首先,这种方法的增量矩阵无需进一步计算,可采用文中给出的形式,并可直接得到位移和速度的数值解;其次,Fox-Goodwin方法的辛几何特性使得该方法具备较高的幅值精度,且应用于无阻尼系统时是一种四阶格式;最后,数值结果证实了高精度Fox-Goodwin时间积分法的精度优势。
致谢
感谢国家自然科学基金资助项目(批准号为11372021和11672019)的资助。