1. 引言
近年来四旋翼空中机器人凭借结构简单,能在狭小空间实现自主起飞和着陆,适应性和隐蔽性更强等特点,使其在无人机学术研究领域成为新的前沿和热点问题[1]。在民用和军事上的应用中,四旋翼机器人也逐渐成为一股新力军,如玉树地震中,民政部采用无人驾驶直升机进行数据采集,评估灾情等工作。由
于四旋翼机器人是一个非线性、多变量耦合的欠驱动系统以及部分参数的不确定性,如何对四旋翼进行高效、准确的控制是各个领域所面临的挑战性课题。
动态逆控制方法的基本原理是通过构造系统的全局状态反馈来抵消系统的非线性特性,将原系统补偿为一个具有线性传递关系的伪线性新系统[2]。由于单纯的动态逆控制系统对数学模型的严格要求,在设计控制律时很多假设和近似值被应用于系统中,导致产生系统误差从而降低控制系统的鲁棒性。而自适应控制可以在线估计不确定参数来消除模型误差使系统达到全局渐近稳定[3]。
目前国内外很多研究者对四旋翼机器人的控制问题进行了研究,由于四旋翼机器人数学模型具有高度复杂性,并且是一个高强度耦合的欠驱动系统,因此各种非线性控制方法常用于四旋翼机器人的姿态控制和轨迹控制。例如自适应滑膜控制技术[4-6],自适应控制[7-10]等都得到了广泛的发展。其中,文献[4-6]对自适应滑膜控制方案的可行性进行了仿真验证,并基于Lyapunov理论证明了其渐近稳定性。文献[7-10]从不同角度阐述了当四旋翼机器人模型不确定或存在建模误差情况下如何利用自适应控制技术解决无人机的导航问题。
在自适应技术迅速发展的情况下,将自适应技术融于其他控制技术来加强控制系统的鲁棒性已经成为无人机控制研究领域的一个新方向。如文献[11]将自适应控制与滑膜控制理论相结合,针对“I”型结构四旋翼机器人的数学模型设计了一个连续的自适应动态变量用于抵消系统的扰动误差,从而实现系统稳定与导航控制。文献[12,13]设计了一种鲁棒自适应滑膜控制器,即将自适应模糊技术与滑膜技术相结合,提出一个自适应动态变量来消除系统中不良的抖动现象。由于动态逆方案设计的高度灵活性,动态反馈线性化技术在无人机研究领域也受到了广泛的关注,如文献[14]中,在牛顿欧拉方程和刚体自由运动方程的基础上,对“X”型结构四旋翼机器人数学模型进行了分析并设计了一种先进动态逆控制器,仿真实现了系统稳定和轨迹跟踪的目的。文献[15]针对四旋翼机器人的飞行控制问题提出了一种反演滑膜控制方案,根据反演理论,在满足李雅普诺夫稳定条件前提下设计滑模控制律来加强控制系统的鲁棒性,实现了系统的稳定控制。
本文主要是在“X”型四旋翼机器人非线性动态模型基础上,将自适应控制技术与动态逆控制技术相结合设计一种自适应动态逆控制器,为系统提供一个自适应动态矢量,该变量能在线估计并补偿四旋翼机器人模型逆误差,使系统达到轨迹跟踪的目的。针对该方案,本文依据Lyapunov理论证明了其渐近稳定性并进行了MATLAB仿真验证。
2. 动力学模型
建立“X”型四旋翼机器人坐标结构图,如图1所示。图中四个螺旋桨能为四旋翼机体提供升力,并满足机体沿三个轴向的俯仰,滚转和偏航运动。
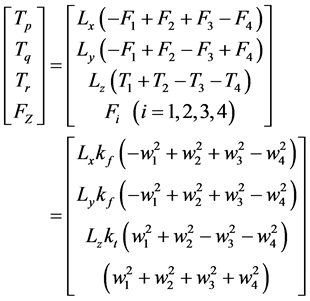
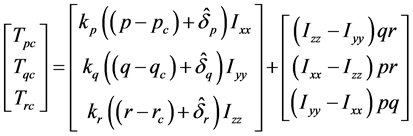
在机体坐标系下,根据“X”型四旋翼机器人的运动规律,四旋翼机器人的受力情况主要包括沿三个轴向的合外力矩和垂直于机体方向合外力,表示如下:
 (1)
(1)
其中 分别表示体坐标系下电机到x,y,z三轴的距离,
分别表示体坐标系下电机到x,y,z三轴的距离, ,
, 分别为螺旋桨拉力和陀螺力,
分别为螺旋桨拉力和陀螺力, 分别表示力矩转换系数,拉力转换系数和电机转速。
分别表示力矩转换系数,拉力转换系数和电机转速。
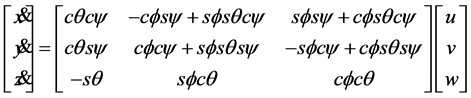
在无人机飞行动力学中,假设机体坐标系与地面坐标系之间的欧拉角为 ,机体在地面坐标系下的位置为
,机体在地面坐标系下的位置为 ,则旋转变换方程和导航变换方程[14],如下所示:
,则旋转变换方程和导航变换方程[14],如下所示:
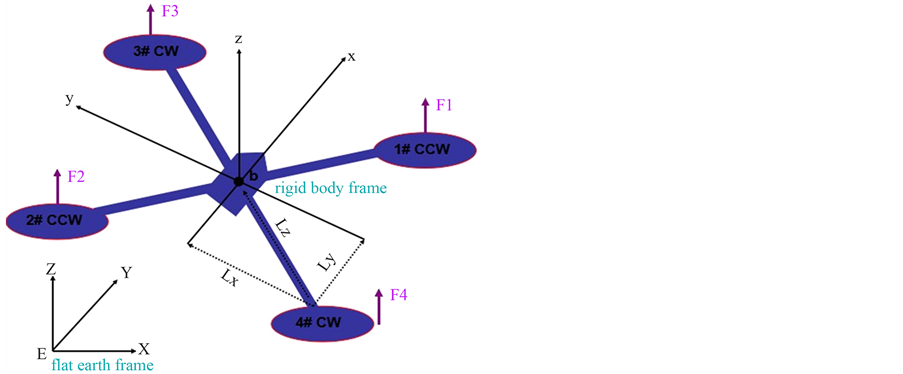
Figure 1. Quad rotor UAV coordinate frame systems
图1. 四旋翼机器人坐标结构图
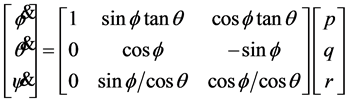 (2)
(2)
 (3)
(3)
其中 ,
, 分别表示体坐标系下机体的运动角速度和线速度。公式(3)中
分别表示体坐标系下机体的运动角速度和线速度。公式(3)中 分别代表
分别代表 。
。
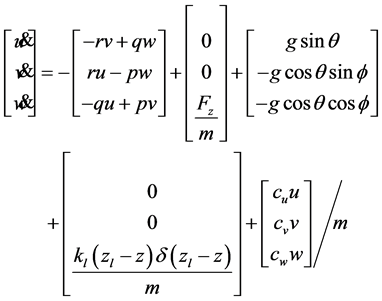
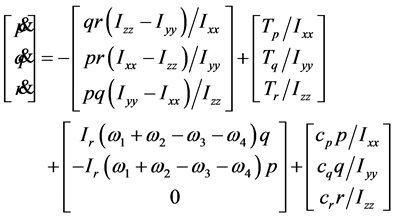
由刚体动力学和牛顿欧拉方程变换可得四旋翼机器人的六自由度数学模型[14],如下所示:
 (4)
(4)
 (5)
(5)
其中 为刚体沿x,y,z三轴的转动惯量,m为刚体质量。
为刚体沿x,y,z三轴的转动惯量,m为刚体质量。 为机体质心沿三个轴的重力向量,
为机体质心沿三个轴的重力向量, 为机体在地面的弹性力,
为机体在地面的弹性力, 和
和 为弹性系数和机体在
为弹性系数和机体在
地面的弹性形变量,其中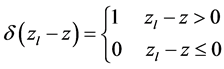 ,
,
可知机体在飞行或离开地面时弹性力消失。 为螺旋桨产生的陀螺力矩向量。
为螺旋桨产生的陀螺力矩向量。 和
和 分别为气动系数和力矩系数。
分别为气动系数和力矩系数。
3. 转子动力学模型
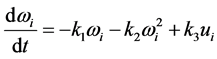
由于螺旋桨旋转速度与无刷直流电机的输入电压成正比,在执行飞行任务时,控制系统通过电机控制单元输出脉宽调制(PWM)信号来控制直流无刷电机的输入电压进而控制电机转速。假设供电电压,电机转速分别为 ,
, ,电机电感忽略不计,建立电机动态模型[11],表示如下:
,电机电感忽略不计,建立电机动态模型[11],表示如下:
 (6)
(6)
其中 为电机模型相关参数,具体数据可参见表3。
为电机模型相关参数,具体数据可参见表3。
4. 自适应动态逆控制方法
考虑到非线性仿射控制系统:
 (7)
(7)
其中 ,
, 分别为状态和控制向量且
分别为状态和控制向量且 ,
, ,
, 连续可微且
连续可微且 可逆。
可逆。 为外部干扰或模型误差,且
为外部干扰或模型误差,且 。
。
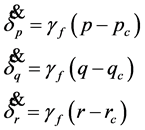
假设微分方程 ,
, 为已知对角矩阵,
为已知对角矩阵, 为误差状态向量,进行求导可得
为误差状态向量,进行求导可得 ,
, 为期望状态向量,
为期望状态向量, 为在线估计值向量,k为已知对角矩阵,可得到动态逆控制输入:
为在线估计值向量,k为已知对角矩阵,可得到动态逆控制输入:
 (8)
(8)
将公式(8)中的动态逆输入量u替换为公式(7)中输入量u并化简可得:
 (9)
(9)
其中 ,构建自适应动态模型如下:
,构建自适应动态模型如下:
 (10)
(10)
通过上述推导可得自适应变量向量 。
。
由于参考轨迹 在特定的时间范围内变化缓慢或无变化,
在特定的时间范围内变化缓慢或无变化, 可看作常数并且外部干扰和模型误差可认为是有界的,假设
可看作常数并且外部干扰和模型误差可认为是有界的,假设 。综合上述推导,由公式(9)和(10)构建被控对象等效的动态模型,该模型必须满足全局渐近稳定性条件并且收敛到零,验证过程如下:
。综合上述推导,由公式(9)和(10)构建被控对象等效的动态模型,该模型必须满足全局渐近稳定性条件并且收敛到零,验证过程如下:
考虑下面的李亚普诺夫候选函数:
 (11)
(11)
对公式(11)进行一阶求导可得:
 (12)
(12)
结合公式(9)和公式(10)可得:
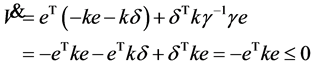 (13)
(13)
由以上验证过程可知,李雅普诺夫候选函数一阶导数小于零,因此控制变量u和自适应动态变量 能使形如公式(7)所示系统达到全局渐近稳定。其中自适应动态变量向量
能使形如公式(7)所示系统达到全局渐近稳定。其中自适应动态变量向量 用于在线补偿模型逆误差并使有界系统达到渐近稳定。
用于在线补偿模型逆误差并使有界系统达到渐近稳定。
5. 自适应动态逆控制器设计
由四旋翼动力学数学模型可知,该飞行器是一个复杂的非线性强耦合的欠驱动系统,为了提高该系统的鲁棒性,应用自适应动态逆控制方法来设计控制律。由于四旋翼机器人的状态量具有明显的时间差异,该控制律主要分为慢回路和快回路两部分,如图2所示。
5.1. 慢回路设计
由于四旋翼机器人的位置变化最为缓慢且其期望的运动轨迹可以分为一系列的序列段点。因此在期望的速度和加速度的约束条件下,轨迹跟踪从一个航
点到下一个航点,可近似看作连续轨迹。根据位置传感器动态响应规律,将慢回路工作频率设定为4 HZ。慢回路控制信号主要分为位置命令xc, yc, zc和偏航命令ψc。假设俯仰角和滚转角很小,由公式(3)和(4)简化可得姿态角和位置导数关系式:
 (14)
(14)
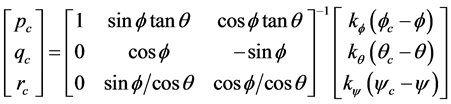
对公式(14)进行逆转换可得自适应动态逆表达式:
 (15)
(15)
其中 为自适应动态逆在线估计值,因此慢回路自适应动态控制律可设计为:
为自适应动态逆在线估计值,因此慢回路自适应动态控制律可设计为:
 (16)
(16)
在轨迹控制过程中,慢回路加速度必须满足:
 (17)
(17)
其中ξ为系统阻尼因子,ω为系统固有频率,图2中 ,
, ,且
,且
 ,
, 。由公式(15)
。由公式(15)
可知慢回路位置控制系统可为快回路姿态控制提供姿态角命令。
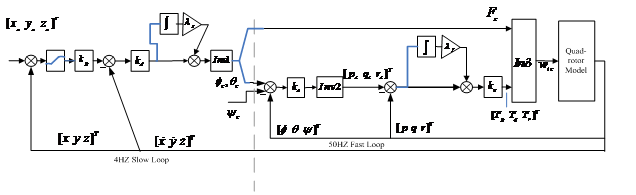
Figure 2. Adaptive dynamic inverse controller of hierarchical structure for quad rotor
图2. 自适应动态逆控制器控制结构
5.2. 快回路设计
快回路是需要快速响应的姿态角变化的姿态控制回路,其循环频率设定为50 HZ。
对公式(2)可进行逆转换可得:
 (18)
(18)
其中逆矩阵表示图2中inv2。
对公式(5)简化后进行转换可得:
 (19)
(19)
其中 表示自适应动态逆在线估计值,因此快回路自适应动态控制律可设计为:
表示自适应动态逆在线估计值,因此快回路自适应动态控制律可设计为:
 (20)
(20)
其中 ,
, 量化方法可参考慢回路公式(17)。
量化方法可参考慢回路公式(17)。
5.3. 电机速度信号
综合慢回路和快回路设计规律,可得机体沿Z轴的合力命令 和机体沿三个轴向的力
和机体沿三个轴向的力
矩命令 ,对公式(1)进行逆转换求得电机速度信号如下:
,对公式(1)进行逆转换求得电机速度信号如下:
 (21)
(21)
其中 表示四个直流无刷电机的转速,该求解过程代表图2中inv3。
表示四个直流无刷电机的转速,该求解过程代表图2中inv3。
6. MATLAB仿真结果
在仿真实验过程中,为了更好观察自适应动态逆控制器的仿真效果,参见表1设置任务一,在实验中设置十个路径包括起飞点和降落点在内,在线动画模拟四旋翼机器人轨迹跟踪的能力并记录。其中控制器和四旋翼模型参数分别如下表2,表3所示。图3为

Table 1. Mission planning
表1. 任务规划
Table 2. Controller parameters
表2. 慢/快回路控制器参数
Table 3. Model parameters in demonstrator of quadrotor
表3. 四旋翼机器人模型参数
任务一中实时自适应动态变量值变化曲线,该任务中四旋翼机器人轨迹跟踪仿真动画和运动轨迹分别如图4,图5所示。图6,图7分别为四旋翼机器人在不同计划任务下沿航点飞行的轨迹跟踪仿真效果,其中蓝色路径代表本次任务中的全部运动轨迹,红色路径为本次任务中已完成的轨迹任务。在本实验中轨迹跟踪仿真任务可描述为四旋翼机器人由起点自动起飞轨迹跟踪至航点一,然后悬停,发生偏航变化,继续轨迹跟踪至下一航点,直到自主降落即任务结束。由仿真结果可以看出,本文中自适应动态逆控制器能完好实现四旋翼机器人轨迹跟踪的目的。
7. 结论
本文在四旋翼机器人非线性动态模型的基础上,
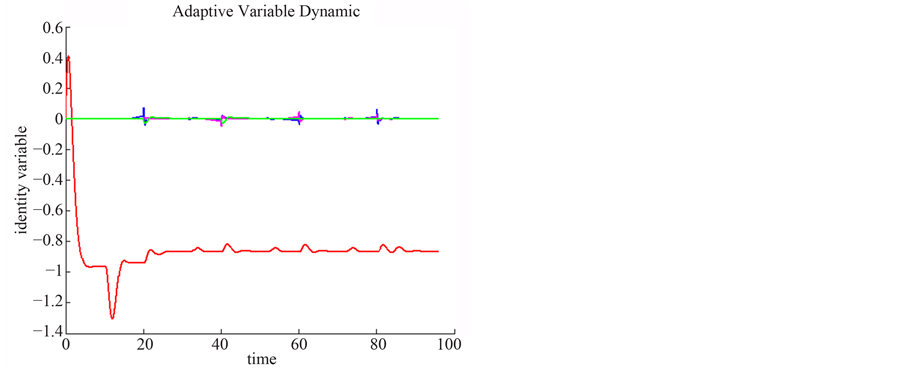
Figure 3. Adaptive variable dynamic model
图3. 自适应动态变量
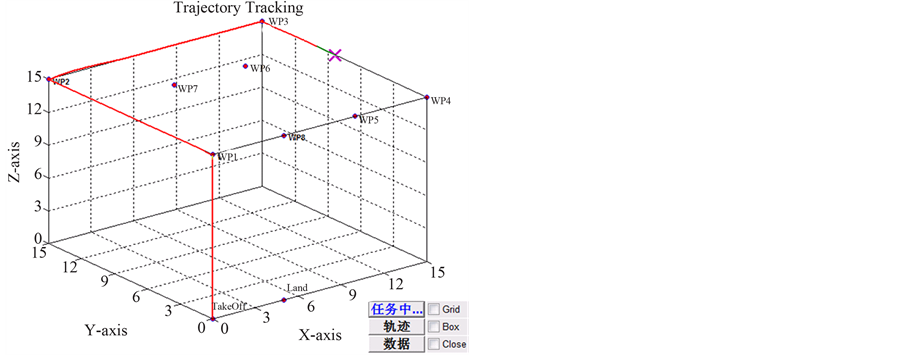
Figure 4. Quad rotor robot animation simul ation
图4. 四旋翼机器人动画仿真
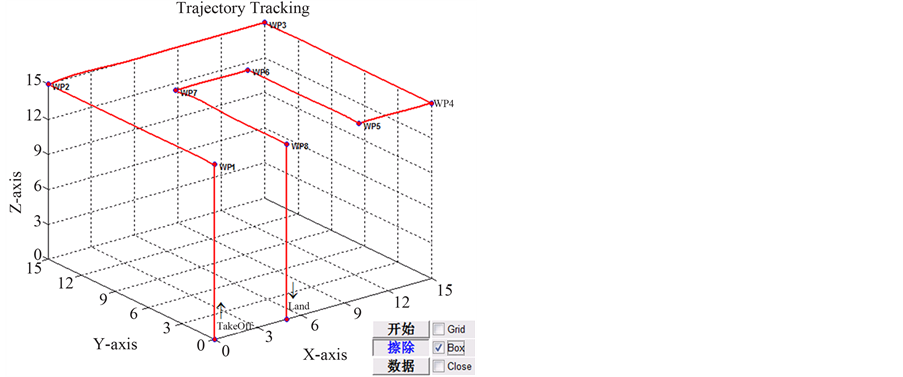
Figure 5. Trajectory of quad rotor robot
图5. 四旋翼机器人运动轨迹
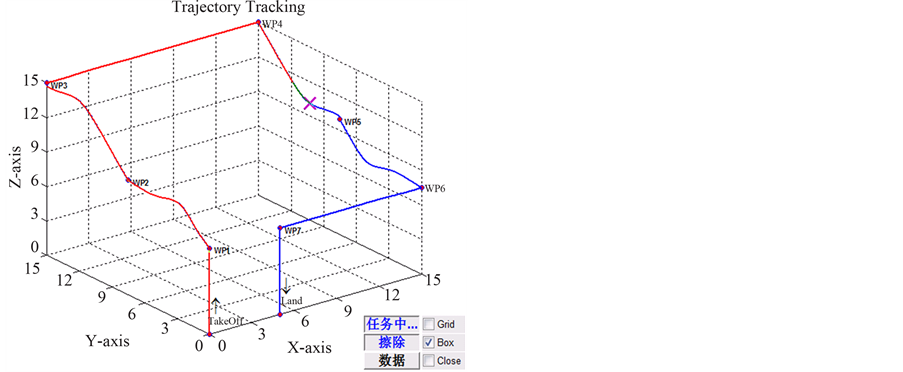
Figure 6. The trajectory of plan 2
图6. 计划二中运动轨迹
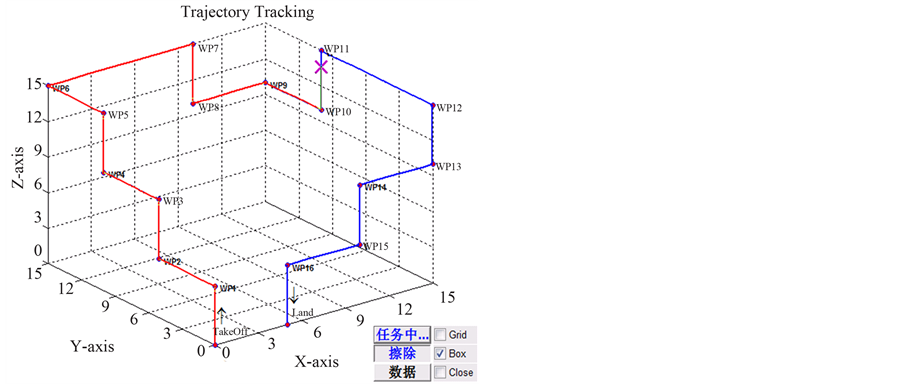
Figure 7. The trajectory of plan 3
图7. 计划三中运动轨迹
将自适应理论融于动态逆控制方法并设计控制律,相比单纯动态逆控制而言能在线估计并补偿模型误差,很大程度上加强了控制系统的鲁棒性,实现系统渐近稳定和轨迹跟踪的目的。MATLAB仿真结果表明了该控制理论的可行性。