1. 引言
中国海岸线长度约为1.85万千米 [1] ,是世界上海岸线最长的国家之一。中国海上险情频发,发生频率居高不下。根据中国海上搜救中心数据,2019~2022年共核实并组织、协调搜救险情6862场,遇险总人数46,779人,对中国人民生命财产安全造成严重冲击。航空救援是海上搜救的常用方式之一,而直升机由于具有机动性强、支持垂直起降和悬停、可以低空低速飞行等能力,在海上救援中能够完成包括搜寻定位、救援救生、通信中继、医疗转运等一系列任务,具有很强的机动性和灵活性。特别地,无人直升机相对于有人直升机,具有有效载荷大、续航时间长、支持全天候执行任务、使用成本低等优势 [2] ,将无人直升机与有人机及搜救船只结合起来,能够拓宽海上救援的时间和空间范围,增加海上搜救的效率。
体系(System of Systems, SoS)字面意思为“系统的系统”,通常可以理解为多个功能独立、操作交互性较强的系统在一定约束条件下集成的总体 [3] 。海上搜救任务涉及多种救援装备,各自具有明确功能,且协同完成救援任务,可视为体系。美国国防部体系结构框架(Department of Defense Architecture Framework, DoDAF)是由美国国防部开发的体系结构框架,用于对体系进行总体、全面、概念性的描述。
目前,已有学者采用DoDAF对航空应急救援体系进行描述。2016年,李迎春等 [4] 采用基于活动的建模方法绘制了DoDAF视图,建立了典型的重大灾害救援系统模型。2020年,区昊辰、邹贵等 [5] 采用DoDAF构建了两栖飞机航空救援场景结构,并据此进行了两栖飞机搜救能力分析。2023年,薛远博等 [6] 基于DoDAF进行了航空应急救援建模,涵盖防灾预警阶段、灾情告警阶段、灾情相应阶段和恢复重建阶段。至此,DoDAF在应急救援的绘制流程与视图选取思路较为清晰,可用于应急救援体系结构的规范性表述。
针对无人直升机特点特性及海上应急救援需求,本文提出一种有人直升机–无人直升机–救援船只(Manned helicopter-Unmanned helicopter-Vessel, MUV)协同救援的海上应急救援方案,并采用体系工程的视角,基于DoDAF体系结构框架对MUV救援场景进行建模,为之后可能的仿真试验与海上应急救援力量建设提供参考。
2. DoDAF体系结构设计
2010年,美国国防部发布了2.02版本的介绍与说明 [7] [8] ,明确了DoDAF 2.0版本的体系开发流程、元模型、视点、术语表等信息,指出应根据目的进行视点的选取与绘制,并在应用中迭代更新。基于该说明中的“体系开发六步法”进行视图选取与绘制,见表1。

Table 1. System development process
表1. 体系开发流程
根据各视图之间的逻辑关系,整理绘制顺序见图1。
体系结构设计与分析的具体步骤如图1所示,首先通过能力视角进行需求分析,能力视角反映救援任务的静态需求;然后构建救援场景的场景结构模型,从高层概念、资源流动情况、节点活动以及关键系统的具体状态变化来对场景进行结构化的描述。构建完整体系层级下的能力与任务活动的关联,并支持模型更新迭代和后续体系结构分析,为进一步的仿真推演系统开发提供顶层架构指导。
3. MUV海上搜救需求分析
3.1. MUV海上搜救任务需求
根据海上搜救的任务种类和任务流程,对MUV海上搜救任务需求进行如下分析。MUV海上搜救的主要任务类型为搜寻和救援。其中,搜寻作业主要由无人直升机完成,救援作业由无人直升机和搜救船只协同完成。搜寻作业的主要目的是搜索、定位遇险人员,并将遇险人员数据传输给有人直升机,用于信息共享和任务调度。搜寻用无人机需要支持多种搜索方式,具有长航时、低空低速飞行的性能,并支持精确定位和信息传输。救援作业的主要目的是救援、医治并转运遇险人员。无人直升机需要支持空投和无人救援两种任务模式,其中无人救援又根据伤情严重与否分为吊带救援和吊索救援。此外,医疗支持也是救援的关键需求,整体MUV海上搜救需求结构见图2。
任务指挥主要由有人直升机完成,作为海上移动平台进行信息获取、信息共享,并对救援力量进行高效调度,形成多机配合、船机配合的任务协同模式。

Figure 2. MUV marine search and rescue requirements analysis
图2. MUV海上搜救需求分析
3.2. 能力需求分析
CV-1能力视点模型见图3,其基于需求分析对MUV海上搜救体系的能力进行了描述,实现了从概览信息到四个一级战术技术指标要求的进程。
CV-2能力分类模型见图4,其定义了战术技术指标要求的层次、关系。图中明确了四个一级战术指标及构成/有机聚合成它们的二级战术指标。
CV-4能力依赖模型见图5,其对战术指标进行了进一步细化,展示了战术技术指标之间的依赖关系,对战术技术指标的从属、战术技术指标间的影响关系进行了描述。

Figure 5. CV-4 capability dependencies
图5. CV-4能力依赖视图
4. MUV场景结构模型构建
由上文分析可知,MUV救援场景涉及元素众多,场景较为复杂多变,存在着难以结构化描述的特点。因此,采用不同视角建模的方式对其场景进行结构化的分析,有助于实际救援人员更好的理解场景,梳理场景中元素与元素之间的关系。
4.1. 高层作战概念模型
高层作战概念模型OV-1见图6,其以图像(辅以文字)的形式直观描绘系统概念,展现系统的目标、架构以及与相关系统的交联关系,其组成包括系统和资源流。
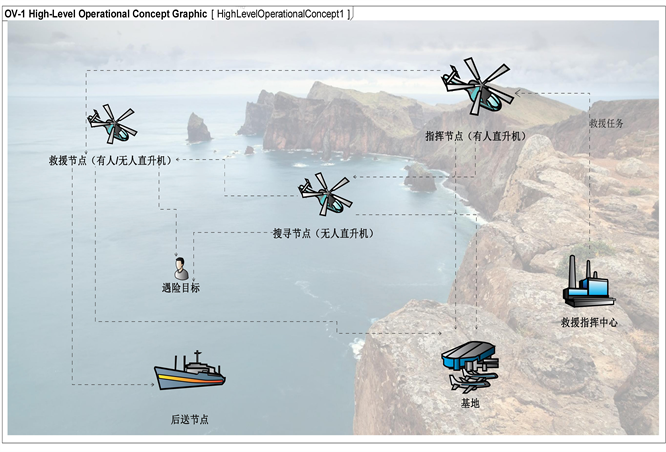
Figure 6. OV-1 high level concept model
图6. OV-1高层作战概念模型
在高层作战概念模型中,MUV救援场景中涉及的主要元素被以“节点”的形式进行描述,其中包括:基地、救援指挥中心、遇险目标、指挥节点、搜寻节点、救援节点和后送节点。在OV-1模型中所描述的“节点”并不是具体的某一型装备,而是代表具有实现某种功能任务的一类对象的总称,例如“救援节点”是所有救援直升机、无人直升机等装备的总称,具体每个装备的行为模型将在系统视点下的相关模型中进行介绍。
4.2. 作战资源流描述
作战资源流描述模型见图7,重点是描述系统内外部节点间的资源交互情况,其对高层作战概念模型所展示的一种场景概念在资源流动的角度上进行了更加详细的补充描述。
MUV救援场景中,以遇险目标节点向救援指挥中心节点发送“遇险信息”信息流作为整个系统运转的起点。救援指挥中心收到遇险信息后,将“救援需求”发送给基地节点,基地则向各个行动实施节点发送“保障请求”。在发现遇险目标后,搜寻节点将搜寻结果反馈至指挥节点,指挥节点根据遇险目标情况发送救援指令协调救援节点对遇险目标展开救援行动,并将其转送至后送节点,最后将救援结果发送至救援指挥中心。以上仅为MUV救援场景中各个节点之间的资源流动方向,描述了信息流的发出方和接收方,但缺少时序性,这将在作战活动模型中进一步补充。

Figure 7. OV-2 description of resource flow
图7. OV-2作战资源流描述
4.3. 作战活动模型设计
作战活动模型见图8,进一步细化分解了OV-1高层概念,描述了与体系结构描述相关的救援活动、活动之间的关系或依赖关系,同时进一步对作战资源流描述模型内外的信息交互、以及活动之间交换的资源进行补充,使整个体系结构更加全面完备。
4.4. 系统状态转换模型
SV-10b系统状态转移描述模型展示了各个系统的内部动作的显式排序。绘制无人救援直升机与无人搜寻直升机的状态机图,见图9、图10,明确其核心状态与转换条件,并保持其活动与体系视角下的作战流程相符合。

Figure 9. SV-10b systems state transition description-rescue
图9. SV-10b系统状态迁移描述–救援

Figure 10. SV-10b systems state transition description-search
图10. SV-10b系统状态迁移描述–搜寻
5. 结构模型分析
能力指标涌现性分析
1) 分析方法
能力指标项涌现是指体系形成之后产生了新的能力指标项,这个能力指标项是构成体系的组分所没有的。体系的能力指标项涌现性,可以通过分析该能力指标项对体系整体的重要度来衡量。Molodtsov提出了一种处理不确定性的方法——软集理论 [9] 。该理论在解决不确定性问题上得到了广泛应用,具有计算相对简单、易于理解的特点,可以很好地描述系统中部分与整体的相互关系,本文采用软集理论对能力指标项涌现度量进行分析和计算。
对于一个软集,关于组分集合E为
,对象集
为各项能力,该软集的决策划分及删除掉一项组分后的决策划分分别为:
(1)
(2)
则
对于决策划分的重要度定义为:
(3)
其中,
,
表示集合的基数。
假设体系应该具有的能力集合
参数集重要度反映体系应该具有能力指标集U基础上,组分E的变化对体系整体能力或性能的影响。重要度最大取值为1,如果重要度越接近1,表明该组分对于体系越重要。由此可以定义该组分对于体系完成特定任务的重要程度。
装备
对体系的重要度为:
(4)
能力指标项涌现性测度为:
 (5)
(5)
能力指标项涌现是体系形成后产生了新的性质,形成了新的功能,出现了新的能力指标项。通过软集理论中的能力指标集决策划分的变化情况来分析度量其涌现性 [10] 。
2) MUV救援场景能力指标涌现性模型
为了证明基于软集理论的能力指标涌现性分析方法的合理性和有效性,本文建立了MUV救援场景体系节点结构,以此进行验证,见图11。
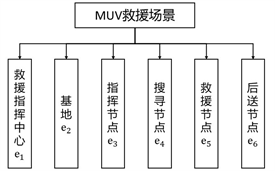
Figure 11. Node structure of MUV rescue scene system
图11. MUV救援场景体系节点结构图
其中集合
为构成该场景的各项节点集合,根据评估主体对各项能力给出的评判结果构建的节点–能力信息表,见表2,评估对象为该场景下各节点所具备的能力,其中各能力项对应第二章需求分析中提出的能力需求。
Table 2. Node capability information table
表2. 节点–能力信息表
其中,A为医疗支持能力、B为无人救援能力、C为空投物资能力、D为联合搜索能力、E为实时通讯能力、F为信息获取能力、G为任务调度能力、H为信息共享能力。
如果将搜寻节点去除,则体系中联合搜索能力则将不存在,去掉搜寻节点后的节点–能力信息表见表3。
Table 3. Node capability information table after removing search node
表3. 去除搜寻节点后的节点–能力信息表
从上表中可以看出,当加入搜寻节点时,不仅搜寻节点具备了相应的能力,并且使得指挥和救援节点均具备了联合搜索能力。因此D可以认为是该体系形成后涌现出来的能力指标项。则依据软集理论,对于
的决策划分为:
;
;
。
通过上述分类结果,可以求得节点重要度依次为:
;
;
;
;
;
。
可求得各节点对完成该任务的贡献率为:
。因此可以得到搜寻节点加入体系后,出现搜寻能力的这项新指标的涌现性测度为: 。
。
上述案例说明,基于软集理论,通过体系各项能力集相关数据的变化情况,可以分析该能力指标项对体系整体的重要度来衡量能力指标项涌现性。
6. 结论
1) 提出了一种有人直升机–无人直升机–救援船只(MUV)救援方案,并针对海上搜救需求进行了分析,将抽象的任务需求转化为具体的8种能力。
2) 针对MUV救援场景,基于DoDAF方法论构建了场景概念模型,描述了各个节点之间的资源流动情况,采用活动模型分析了节点活动及其之间的交互关系,最后通过系统状态转换模型具体构建了搜救装备的系统运行情况,实现了对复杂场景的结构化描述。
3) 基于软集理论对结构模型进行分析,构建了MUV救援场景能力指标模型,验证了能力指标涌现性分析方法是可行的。
基金项目
2022年海南省重点研发计划(第一批),海上多用途无人直升机研制(项目编号:ZDYF2022GXJS014)。
NOTES
*通讯作者。