1. 引言
近年来,随着技术的进步和经验的积累,可植入式心室辅助装置对心力衰竭患者的治疗效果得到了显著提高。它可以有效改善心脏功能,减轻心脏负荷,提高生活质量,并且可以在等待心脏移植的过程中维持患者的生命。血泵驱动控制系统是可植入式心室辅助装置实现电能到血泵旋转机械能转换的关键,稳定高效且满足生理需求的驱动系统是血泵运行的基础 [1] 。由于可植入式心室辅助装置需安装在人体内,并能实现在人体血液中持续稳定高速运转。而传统的带有转子位置传感器的电机驱动系统电缆布线、安装和包装会占用较大空间,不适用于体积小的微电机 [2] 。因此可植入式血泵驱动多采用无位置传感器的控制方式。
目前,国内外学者对直流无刷电机的无位置传感器控制方法进行了很多研究,提出了包括反电动势过零检测法、续流二极管法、状态观测器法、磁链法、电感法及智能控制法等一系列转子位置估计方法。其中反电动势过零检测法是目前最常用、实现最简单的一种控制方法 [3] 。然而与低速和中速驱动器不同,高速驱动器的控制需要在硬件上非常准确且深入实现算法。执行中的任何不准确性(执行顺序、测量触发等)都会导致相当大的位置误差,从而导致不稳定和低效运转 [4] 。目前,对高速电机的无位置传感器控制主要围绕基于状态观测器法的永磁同步电机FOC控制。其中,扩展卡尔曼滤波观测器是目前使用最为广泛的状态观测器算法。
由此,本课题致力于研究比较反电动势过零检测法和扩展卡尔曼滤波观测器法两种无感控制方式用于潜血式高速微电机驱动控制系统的性能。并且证明了将扩展卡尔曼滤波器用于高速永磁同步电机驱动器进行电机转子位置观测是可行的,并且具有良好的鲁棒性。
2. 直流无刷电机无感控制原理
直流无刷电机无感控制整体框图如图1所示,电机由六步逆变器供电。直流无刷电机的反电动势和相电流波形如图2所示。
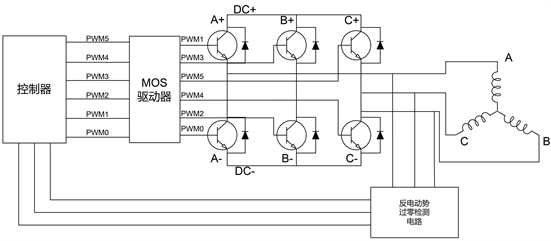
Figure 1. Overall block diagram of DC brushless micromotor sensorless control
图1. 直流无刷电机无感控制整体框图

Figure 2. The back-EMF and phase current waveforms of the brushless DC motor
图2. 直流无刷电机的反电动势和相电流波形图
第一个60˚内,A相电流为正,B相电流为负,C相电流为零,这说明电机AB相通电,电流从A相流入B相,C相为开路。此时将A、B两相的中点电压设为
。将
和
引出作为比较器的两个输入端,如图3所示。
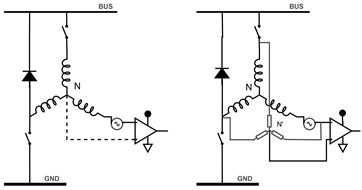
Figure 3. The zero-crossing detector for back-EMF
图3. 反电动势的过零点检测器
(1)
(2)
因为在第一个60˚内,
,所以当
时,
,比较器输出高电平;当
时,
;比较器输出低电平。当发生高低电平跳变时,C相反电动势过零点产生。准确检测出反电动势的过零点后,将其延迟30˚,进行换相操作。在电机旋转的一个电周期中,电机A、B、C三相会产生六个过零点,分别对应六种过零信号组合情况 [5] 。六个开关(A+、A−、B+、B−、C+、C−)的换向顺序如下表1所示。

Table 1. The conduction status of the windings corresponding to the combination of zero-crossing signals
表1. 过零信号组合对应的绕组导通情况
3. 永磁同步电机FOC控制
磁场定向控制(FOC)具有控制精度高、转矩脉动小的优点。它采用了坐标变换方法,将采集的三相电流分解为转矩方向和励磁方向的电流,采用这样的解耦方式可以把对交流电机的控制转化为近似直流电机的控制,大大提高了控制电机的性能 [6] 。因此,FOC算法适用于控制精度高、外部环境稳定的场景,非常适合于潜血式高速微电机驱动系统的设计。
3.1. FOC控制流程
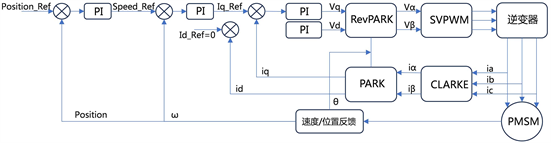
Figure 4. The block diagram of a FOC motor control system
图4. FOC系统控制框图
如图4所示,FOC系统控制框图包括电流环、速度环、位置环三大闭环控制。其控制过程如下:
1) 电流采样,对电机的三相定子电流进行采样;
2) Clark变换,将三相静止坐标系下的电流变换到α-β坐标系下;
3) 位置速度估算,用观测器估算出新的速度ω和位置θ。速度ω与参考值Speed_ref产生的误差信号作为速度环PI的输入,位置θ作为Park变换和逆变换的输入角度;
4) Park变换,按照观测器输入的位置θ,将α-β两相坐标系旋转到与转子磁通对齐的d-q同步旋转坐标系,得到iq和id;
5) 速度环计算,将速度误差作为速度环PI的输入,输出为Iq的参考值I_qref;
6) 电流环计算,将iq和id分别作为两个电流环PI的输入,输出分别为Vq和Vd,作为下一次在电机上的电压矢量;
7) Park逆变换,使用新的角度把Vq和Vd变换到到两相静止坐标系的Vα和Vβ;
8) SVPWM运算,将Vα和Vβ通过Clark逆变换得到三相电压值Va、Vb和Vc,再根据SVPWM算法进行调制,合成电压空间矢量,输出该时刻三个半桥的开关状态进而控制电机旋转 [6] 。
3.2. Clark变换和逆变换
Clark变换是按照电流产生的磁场相等的原则将三相静态坐标系转化到两相静态坐标系α-β的坐标变换。如图5所示,根据坐标系之间的关系,可以得出坐标变换矩阵为式3所示。
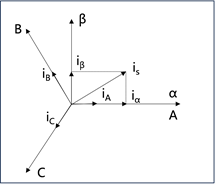
Figure 5. Schematic of Clark coordinate transformation
图5. Clark坐标变换示意图
(3)
Clark逆变换是指将两相静态坐标系α-β转换到三相静态坐标系的坐标变换,其坐标变换矩阵为式4所示。
(4)
3.3. Park变换和逆变换
Park变换是将两相静态坐标系α-β转化到两相旋转坐标系d-q的坐标变换,如图6所示。根据各坐标系的关系可得出坐标变换矩阵为式5所示。
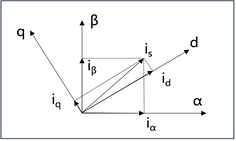
Figure 6. Schematic of Park coordinate transformation
图6. Park坐标变换示意图
(5)
相应地,Park逆变换是将两相旋转坐标系d-q转化到两相静态坐标系α-β的坐标变换,其坐标变换矩阵为式6所示。
(6)
以上简单分析了静止坐标系与同步旋转坐标系中各变量之间的关系。需要说明的是,进行坐标变换的原因是将三相电流解耦到两相垂直于和平行于转子的方向,即Iq和Id,从而可以像控制直流电机一样,通过控制转矩电流和励磁电流来控制转矩的大小和方向从而控制交流电机。当励磁电流为零时,只存在转矩电流用来提供力矩,此时可以使力矩实现最大化,这就是FOC算法中常用的Id为0的控制策略。
3.4. SVPWM运算
SVPWM即空间电压矢量由三相逆变器的六个开关元件组成的特定开关模式,使输出电压波形尽可能接近于理想的正弦波形。如图7所示,SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。
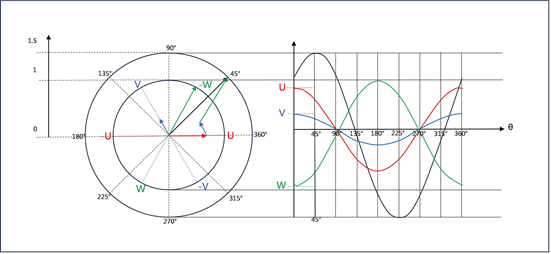
Figure 7. Three-phase sinusoidal system and its rotational equivalent space vector
图7. 三相正弦系统及其旋转等效空间矢量
4. 扩展卡尔曼滤波算法在永磁同步电机FOC无感控制中的应用
4.1. 永磁同步电机数学模型的建立
PMSM在两相静态坐标系α-β中的数学模型建立如下 [7] :
(7)
(8)
其中,
和
分别是定子电压的α-β轴分量;
和
是定子电流的α-β轴分量;R是定子的电阻;
为PMSM的直轴和正交轴的定子电感,表贴式PMSM的直轴和正交轴定子电感相同,
;
是电角速度;
是PMSM的磁链;
表示当前转子的电角度。
由方程(7)和方程(8)可得电流方程为 [8] :
(9)
(10)
(11)
(12)
PMSM的连续时间状态空间模型可以写如下:
(13)
(14)
其中,A、B、C可以表示如下:
(15)
(16)
4.2. 扩展卡尔曼滤波器数学模型的建立
扩展卡尔曼滤波(EKF)是一种用于非线性系统的两阶段预测校正算法,它的优势在于巧妙的融合了观测数据与估计数据,对误差进行闭环管理,将误差限定在一定范围。EKF算法是将非线性函数进行泰勒展开,省略高阶项,保留展开项的一阶项,以此来实现非线性函数线性化,最后通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值。
扩展卡尔曼滤波EKF的状态转移方程和观测方程为 [9] :
(17)
(18)
其中,
为状态向量,
为量测向量,
和
分别为系统非线性状态函数和量测函数, 为过程演化噪声,
为量测噪声。
为过程演化噪声,
为量测噪声。
假设我们已知k时刻状态估计值和估计方差
我们将非线性函数
在
处进行一阶泰勒展开可得:
(19)
我们定义
,忽略高阶项,状态方程可转化为:
(20)
基于以上的公式,给出EKF的预测和校正的五个步骤 [10] :
预测状态方程:根据系统状态变量k − 1时刻的最优值以及系统输入计算得到系统的预测值。
(21)
其中,
为状态转移矩阵,表示将k − 1时刻的状态向量转移至k时刻的状态向量;
代表着控制向量,
是输入控制矩阵,代表着将控制向量
映射到状态向量上,统一控制向量和状态向量之的关系。
预测协方差方程:根据k − 1时刻的系统协方差预测k时刻系统协方差。
(22)
其中,
为预测状态的高斯噪声的协方差阵。
卡尔曼增益方程:根据协方差矩阵的预测计算卡尔曼增益,使得最优估计值的方差最小。
(23)
其中,
为转换矩阵,他将状态向量
映射到测量值所在的向量空间
。
校正最优值方程:根据状态变量的预测值和实际系统的测量值计算得到k时刻状态变量的最优值。
(24)
校正协方差方程:为得到下一时刻的卡尔曼输出值做准备。
(25)
5. 驱动系统的设计与仿真
本章利用Matlab Simulink对BLDC无感驱动系统和FOC无感驱动系统进行设计和仿真。被控对象为额定电压为6 V的5 mm稀有金属高速微电机,型号为DCU08017,电机的主要参数如表2所示。
Table 2. Main parameters of DCU08017 Motor
表2. DCU08017电机主要参数
5.1. 仿真模型的建立
5.1.1. BLDC无感驱动系统的仿真
基于反电动势传感技术的BLDC无感驱动系统仿真模型如图8所示。系统采用电流环速度环双闭环控制,在电流反馈回路中采用了基于反电动势过零点检测的PWM逆变器。在速度反馈回路中采用了PI控制器,以给定速度为输入,在运行过程中对给定速度和当前速度的偏差进用PI控制器进行调节。
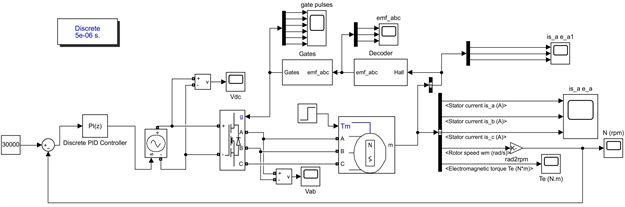
Figure 8. Simulation model of BLDC sensorless drive system based on back EMF sensing technology
图8. 基于反电动势传感技术的BLDC无感驱动系统仿真模型
5.1.2. 永磁同步电机FOC无感驱动系统的仿真
基于扩展卡尔曼滤波观测器的FOC无感驱动系统仿真模型如图9所示。系统采用电流环速度环双闭环控制。如图10所示,三相电流Ia,Ib,Ic经过Clark变换得到Iα,Iβ;然后经过Park变换得到Iq,Id分别与他们的设定值Iq-Ref,Id-Ref计算误差值;再分别将q轴电流误差值代入q轴电流PI环计算得到Vq,将d轴电流误差值代入d轴电流PI环计算得到Vd,对Vq,Vd进行反Park变换得到Vα,Vβ经过SVPWM算法得到Va,Vb,Vc,最后输入到电机三相上。这样就完成了一次电流环的控制。其中,Clark变换、Park变换、反Park变换输入端所需的当前转子位置信息θ由扩展卡尔曼滤波观测器测得。如图11所示,将扩展卡尔曼滤波观测器计算得到的电机反馈速度Speed_fdk与速度设定值Speed_Ref进行误差值计算,代入速度PI环,计算的结果作为电流环的输入;因为d轴电流对于驱动电机的转动不会产生输出力,所以通常情况下都会将d轴电流设定为零(但不是总是设定为0的);当Id_Ref = 0时,Iq_Ref就等于了速度环的输出;再结合上面的电流环,就实现了速度电流的双闭环控制。
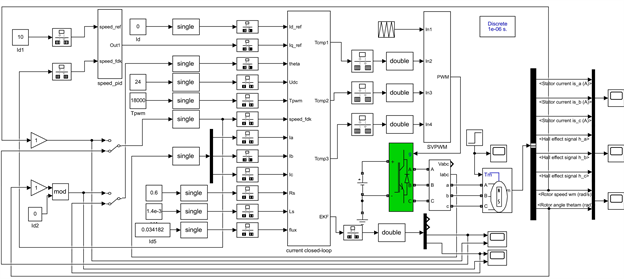
Figure 9. Simulation model of FOC sensorless drive system based on EKF observer
图9. 基于扩展卡尔曼滤波观测器的FOC无感驱动系统仿真模型
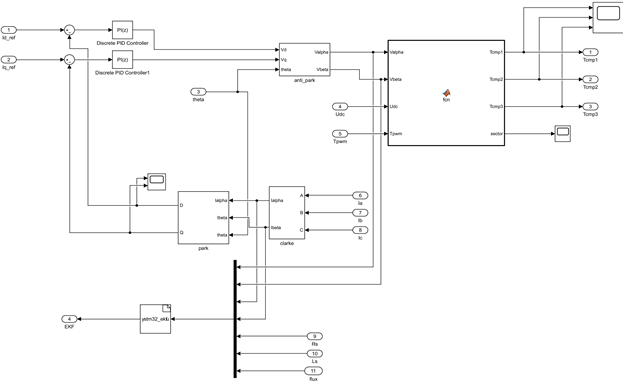
Figure 10. Current loop simulation model of FOC sensorless drive system
图10. FOC无感驱动系统电流环仿真模型
为了得到当前电机的转速ω和当前转子位置θ需要用到扩展卡尔曼滤波观测器,其控制流程图如图12所示。
5.2. 仿真结果分析
设计目标转速为30,000 r/min,根据DCU08017电机参数表对两个仿真模型设置电机参数,并调整PI控制器参数。分别对两个驱动控制系统进行仿真实验,通过观察相电流、转速、电磁转矩波形图对两个驱动系统的性能进行分析比较。
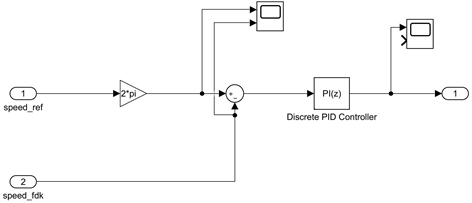
Figure 11. Velocity loop simulation model of FOC sensorless drive system
图11. FOC无感驱动系统速度环仿真模型
3

Figure 12. Extended Kalman filter control flow
图12. 扩展卡尔曼滤波控制流程
电流环和速度环的PI控制器参数由表贴式永磁同步电机电流环和速度环的传递函数得出,公式(26)表示电流环的PI控制器参数整定公式,公式(27)表示速度环的PI控制器参数整定公式。
(26)
(27)
公式中,β代表速度环的带宽(通常设置为50),J代表转动惯量,p代表磁极对数,
代表磁链。
计算后,电流环的PI参数应设为
,
,速度环的PI参数应设为
,
。
5.2.1. 三相电流波形
BLDC无感驱动三相定子电流仿真波形如图13所示,FOC无感驱动三相定子电流仿真波形如图14所示。三相定子电流波形表明在BLDC无感驱动方式下三相定子电流会出现大量噪声,而在FOC无感驱动方式下三相定子电流均为比较规则的正弦波。
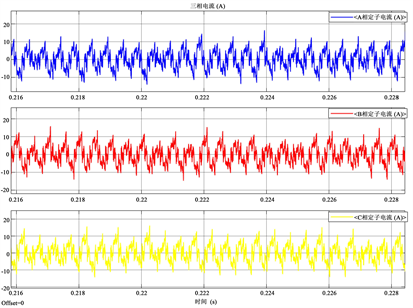
Figure 13. Simulated waveform of three-phase stator current of BLDC sensorless drive
图13. BLDC无感驱动三相定子电流仿真波形图
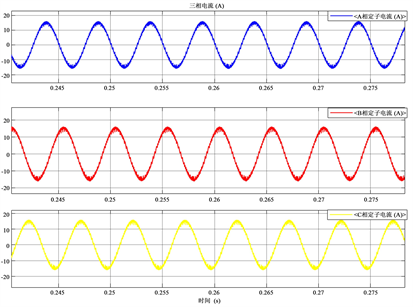
Figure 14. Simulated waveform of three-phase stator current of PMSM FOC sensorless drive
图14. 永磁同步电机FOC无感驱动三相定子电流仿真波形图
5.2.2. 转子转速波形
图15、图16分别为BLDC无感驱动转子转速波形图和FOC无感驱动转子转速波形图。从转速波形图可以看出,在BLDC无感驱动方式下电机到达目标转速响应时间较长且存在超调现象,而在FOC无感驱动方式下电机起动响应快且较为精确地达到目标转速。
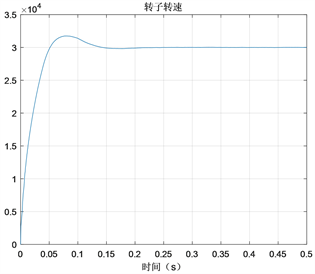
Figure 15. Simulated waveform of BLDC sensorless drive rotor speed
图15. BLDC无感驱动转子转速仿真波形图
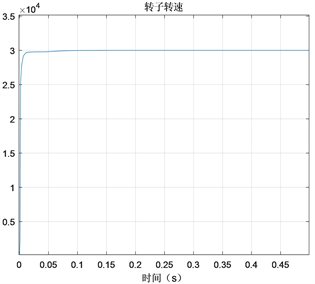
Figure 16. Simulated waveform of rotor speed of PMSM FOC sensorless drive
图16. 永磁同步电机FOC无感驱动转子转速仿真波形图
5.2.3. 电磁转矩波形
BLDC无感驱动电磁转矩波形和FOC无感驱动电磁转矩波形如图17、图18所示。从电磁转矩波形图可以看出,FOC无感驱动方式相较于BLDC无感驱动方式电磁转矩脉动小且转矩纹波较少。
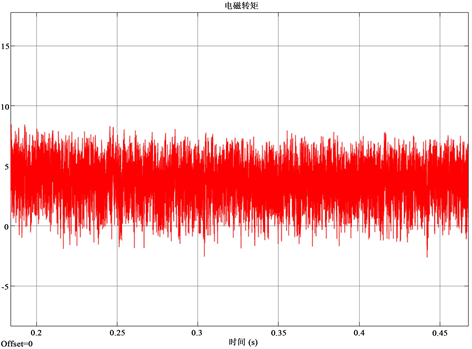
Figure 17. Simulated waveform of BLDC sensorless drive electromagnetic torque
图17. BLDC无感驱动电磁转矩仿真波形图
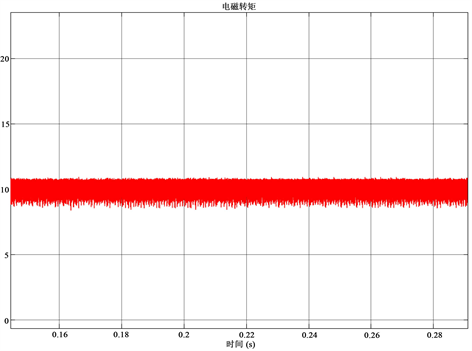
Figure 18. Simulated waveform of electromagnetic torque of PMSM FOCsensorless drive
图18. 永磁同步电机FOC无感驱动电磁转矩仿真波形图
通过对电机三相电流、转子转速、电磁转矩三种波形的分析可以判断,基于扩展卡尔曼滤波的FOC无感驱动方式在高速电机控制方面相较于BLDC无感驱动方式更为精确且效率更高、稳定性更高、能耗更低。
6. 结论
本文针对用于潜血式血泵驱动的高速微电机无传感器反馈驱动控制系统,研究比较了基于反电动势传感技术的BLDC无感控制系统和基于扩展卡尔曼滤波观测器的FOC无感控制系统。对两个系统的工作原理进行了分析,并利用matlab simulink软件对两个控制系统进行仿真实验。实验结果表明,对于我们最高转速为35,000 r/min的医用高速微电机来说,FOC无感控制方式转矩平稳、效率高、噪声小、动态响应快。而BLDC无感控制方式精度差、运转不流畅、转矩波动大、存在一定的电流噪声,仅适用于对电机转动性能要求不高的场合。本文还验证了扩展卡尔曼滤波算法应用于高速电机驱动器的可行性,基于扩展卡尔曼滤波观测器的FOC无感控制系统用于型号为DCU08017的稀有金属高速微电机具有良好的动态性能和鲁棒性。