1. 引言
对于空间悬索桥,影响其线形和结构受力的一个重要因素就是索鞍位置安放的准确性 [1] [2] [3] [4] 。如果其位置安放不当不仅影响到悬索桥的几何形状,还会在桥塔的底部产生巨大弯矩,就有可能使桥塔产生偏位。因此,对空间悬索桥索鞍的设计位置进行精确的计算具有重要意义 [5] [6] [7] [8] 。
李传习等 [9] [10] 根据索鞍和主缆的几何相容条件建立出多元非线性方程组,并用牛顿–拉斐森法求解方程组得到空间悬索桥鞍座设计位置,但这类方法对约束条件和迭代初值的选取具有较高要求,计算过程也较为繁琐。齐东春 [11] 提出了可自动满足主缆与鞍座相切的鞍座单元,通过对单元进行状态求解可推导出单元节点力,在计算中发现该单元具有很高的计算精度,但该方法在对初始值进行迭代时不够精确,在某些特殊情况下会由于迭代初值精度不高而导致计算结果不收敛。
针对上述方法存在的问题,本文在分析主缆与索鞍几何及力学关系的基础上,引入空间斜率作为缆索系统方程的基本参数,并根据主缆与索鞍存在的几何相容条件建立二元非线性方程组,最后采用二分法求解上述方程组即可求解出空间缆索悬索桥水平母线鞍座的设计位置。在整个计算过程中不需要初始值的参与即可实现对所有水平母线鞍座设计位置的计算结果收敛。
2. 以空间斜率为基本参数的主缆线形方程的推导
2.1. 主缆索段的划分
在分析过程中,假定主缆具备以下三条性能:1) 主缆的材料满足胡克定律,在正常的使用过程中其伸长量与受力呈线性关系;2) 主缆仅承受拉应力;3) 主缆在受力情况下其横截面积的变化在计算中可以忽略不计 [12] 。
对图1所示的空间主缆,以缆索和吊杆连接处将主缆索段划分开。以主缆的最低点S点为分界点将主缆分为左右两部分,并以S为坐标原点定义沿纵桥向、横桥向及铅垂方向分别为其x轴、y轴及z轴。
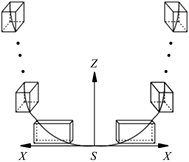
Figure 1. Schematic diagram of cable segment division
图1. 索段划分示意图
2.2. 以空间斜率为基本参数的主缆线形方程的提出
将任意一个索段的坐标原点移动到该索段曲线上斜率为0的位置,可以得到所有索段的悬链线方程。索段坐标系示意如图2。
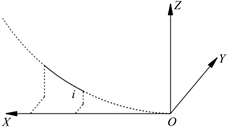
Figure 2. Schematic diagram of cable segment coordinate system
图2. 索段坐标系示意图
本文作者通过前期研究得到全桥的主缆线形方程 [13] :
(1)
(2)
(3)
其中x、y、z分别为索段i上某一点沿纵桥方向、沿横桥方向及沿铅垂方向的坐标;Hx、Hyi、及Vi分别为索段i所承受索力沿纵桥方向上、沿横桥方向及沿铅垂方向的分力大小;Hi为索段i所受索力投影到XOY平面的索力大小;Hys为第s个索段沿横桥方向所受的索力大小;Li为索段i的最高点至最低点沿着x轴方向的长度;xc为第n个索段上的任意一点c与该索段最低点沿x轴方向上的距离;E为主缆弹性模量;A为主缆的横截面积;q为主缆单位自重集度;k为空间斜率(对鞍座两侧的主缆上任意一点引一条切线,其相对于XOY平面的倾斜程度)。
3. 水平母线鞍座位置计算
3.1. 水平母线鞍座模型的构建
空间悬索桥鞍座为了支承所有受力的主缆能够平顺地改变其方向 [14] ,鞍座上的鞍槽曲线在理论上应该是三维结构的。但在工程上,往往会对其三维结构进行简化处理,将鞍座的主缆中心线设计到同一圆柱面上,并以该圆柱面上的母线倾斜程度不同将鞍座分为水平母线鞍座和倾斜母线鞍座两类 [15] 。本文讨论的水平母线鞍座可以看作圆柱体的某一部分,并构建如图3所示的鞍座模型便于分析计算。
图3中,T为理论顶点(索鞍两侧主缆的切点顺延悬链线的交点 [12] ),B、C点分别为鞍座左右两侧主缆的切点,线L即为圆柱体的中轴线。T点在理论顶点左侧主缆坐标系下的坐标
,空间斜率k1;B点在理论顶点左侧主缆坐标系下的坐标
,空间斜率k3。T点在理论顶点右侧主缆坐标系下的坐标
,空间斜率k2。C点在理论顶点右侧主缆坐标系下的坐标
,空间斜率k4。本文所求的索鞍设计位置即为该模型中轴线L的位置。为便于计算线L的位置,将图4索鞍模型投影到平面XOZ上。投影后,图4坐标系的原点、x轴及z轴不变。
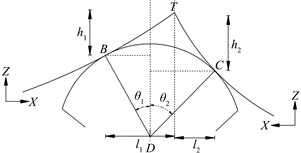
Figure 4. Planar projection of cable saddle
图4. 索鞍平面投影图
在图4中,圆心D点即是本文最终所需计算的索鞍设计位置,由于图4为XOZ二维坐标系,故在理论顶点左、右两侧坐标系下,理论顶点坐标分别简化为
及
,理论顶点的平面斜率(T点所在切线相对于x轴的倾斜程度)分别为g1、g2,左右侧主缆切点B、C点平面斜率分别为g3、g4,B、C点坐标分别为
、
,B、C点空间斜率分别为k3、k4。
是B、D之间的连线与过D点的铅直线的夹角,
是C、D之间的连线与过D点的铅直线的夹角。h1是B、T在z轴方向上的距离,h2是C、T在z轴方向上的距离。l1是B、T在x轴方向的距离,l2是C、T在x轴方向的距离。
利用图3、图4中的计算模型,构建方程组,计算水平母线鞍座设计位置。在图4中未知量有左、右切点空间斜率,左、右切点平面斜率,左、右两侧主缆切点的坐标。已知量有理论顶点坐标,左、右两侧主缆所受拉应力沿着纵桥向的分力Hx1、Hx2,沿着横桥向的分力Hy1、Hy2,沿着铅垂方向的分力V1、V2,主缆的弹性模量E、单位自重集度q及横截面积A。
3.2. 索鞍位置的计算
将索鞍切点于空间中进行分析,索鞍切点分析图见图5。
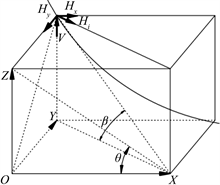
Figure 5. Analysis of the tangent point of the saddle
图5. 索鞍切点分析图
将主缆在切点处所受拉力投影到水平面XOY上其大小为:
(4)
切点空间斜率k的表达式:
(5)
切点平面斜率g的表达式:
(6)
由式(4)、式(5)、式(6)可得:
(7)
切点平面斜率g可由夹角
表示:
,
(8)
由图4可知,BT和TC之间的水平距离之和相等于BD和DC之间水平距离之和:
(9)
式(8)与式(9)联立得:
(10)
式(7)与式(10)联立得:
(11)
右切点C的x坐标:
(12)
右切点C与理论顶点T在纵桥方向的距离:
(13)
左切点B的x坐标:
(14)
左切点B与理论顶点T在纵桥方向的距离:
(15)
式(11)、式(13)、(15)联立得:
(16)
式(16)所构建方程的未知参数只有左、右切点空间斜率k。求解该方程,只需构建另一个仅含有左、右切点空间斜率两个未知参数的方程。
图4中左、右切点B和C分别与理论顶点T之间的竖直距离之差相等于左、右切点分别与圆心之间的竖直距离之差:
(17)
式(8)与式(17)联立得:
(18)
式(7)与式(18)联立得:
(19)
右切点C的z坐标:
(20)
右切点C与理论顶点在竖直方向的距离:
(21)
左切点B的z坐标:
(22)
左切点B与理论顶点在竖直方向的距离:
(23)
式(19)、式(20)、(22)联立得:
(24)
式(24)是本文构建的另一个未知参数只有切点空间斜率的方程。它和式(16)组成一个二元非线性方程组,通过二分法即可求解。
求解过程应首先给出左、右切点的求解范围,再两次利用二分法分别逼近左、右切点的正确解,直到左、右切点空间斜率均满足精度要求。具体步骤如图6。
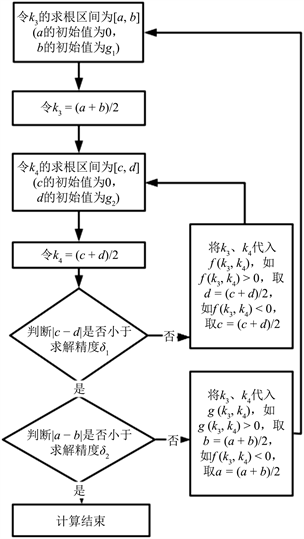
Figure 6. Calculation process of spatial slope k3, k4
图6. 空间斜率k3、k4计算流程
得到左、右切点空间斜率的解后,再利用式(1)、式(2)、式(25)、式(26)可得左、右切点的坐标。
(25)
(26)
最后通过左、右切点与圆心之间的几何关系确定圆心D的位置。
(27)
(28)
4. 算例
某自锚式空间悬索桥(桥跨83 + 260 + 83 m)采用独柱式桥塔,索鞍半径为3.2 m,鞍座上主缆材料基本参数为:横截面面积A = 0.0715 m2、自重集度q = 6.2 KN/m、弹性模量E = 198,000 MPa。低塔侧理论顶点为(2273.0000, 97.7050, 1.5000),在成桥状态理论线形计算中,得出索鞍左、右两侧主缆索力沿着纵桥向、横桥向及铅垂方向的分量分别为Hx1 = 20929.52 kN、Hy1 = 0 kN、V1 = 16600.98 kN (边跨),Hx2 = 20929.53 kN、Hy2 = 5176.92 kN、V2 = 16918.72 kN (中跨)。高塔侧理论顶点为(2533.0000, 99.9150, 1.5000),同理计算出索鞍左、右主缆索力沿着纵桥向、横桥向及铅垂方向的分量分别为分量Hx1 = 20923.26 kN、Hy1 = 5744.63 kN、V1 = 17238.66 kN (边跨),Hx2 = 20923.26 kN、Hy2 = 0 kN、V2 = 16237.99 kN (中跨)。
利用算例的已知条件将算例的坐标体系转化为图4的坐标体系。由式(1)、式(2)、式(5)可得,低塔侧T点在索鞍左侧坐标系下空间斜率k1 = 0.793184936874,T点坐标(2459.25, 934.55),低塔侧T点在索鞍右侧坐标系下空间斜率k2 = 0.784717036837,T点坐标(2436.89, 944.49)。高塔侧T点在索鞍左侧坐标系下空间斜率k1 = 0.794498074908,T点坐标(2462.14, 971.77),高塔侧T点在索鞍右侧坐标系下空间斜率k2 = 0.776073613768,T点坐标(2413.00, 898.56)。最后解得低塔侧左切点空间斜率 = 0.792427884476,右切点空间斜率k2 = 0.783968691582。高塔侧左切点空间斜率k1 = 0.793751716614,右切点空间斜率k2 = 0.775319099426。
将本文的计算结果同文献 [9] 的结果放在一起进行对比,如表1。

Table 1. System resulting data of standard experiment
表1. 索鞍位置计算结果
5. 结论
1) 本文提出了一种改进的求解空间缆索悬索桥水平母线鞍座设计位置的方法。以空间斜率作为主缆线形方程的基本参数,并结合索鞍与其主缆存在的变形相容关系及力学关系,以鞍座左、右两侧主缆的切点空间斜率为未知量建立二元非线性方程组,再求解该二元非线性方程组即可得到水平母线索鞍设计位置。
2) 本文改进方法采用二分法求解非线性方程组,计算过程无需任何迭代初值与约束条件,大大减少了计算量,同时对所有水平母线鞍座设计位置的计算均可保证收敛。
3) 通过算例计算水平母线鞍座位置并与传统算法进行对比,发现改进算法计算的水平母线鞍座设计位置精度较高。
参考文献