1. 引言
随着全球化和城市化进程的加速,商品运输等交通需求日益增长,汽车保有量也随之急剧增加,使得全国的大、中、小型城市都面临着严重的交通拥堵和环境污染问题 [1] 。近年来,随着5G、人工智能等技术的发展,集无线传感、无线通信、自动化和管理科学等跨学科技术于一体的智能交通系统(Intelligent Traffic System, ITS)应运而生,成为解决这些问题的优选解决方案 [2] [3] 。在目前的ITS中,车辆的智能化和网联化已逐渐成为主导的发展方向,由此,智能网联车(Connected and Automated Vehicles, CAVs)成为各大厂家和各国竞相发展的前沿技术。CAVs可以通过V2I通信技术及时与交通管理中心进行数据交互,同时依靠可靠的V2V通信、先进的检测和控制技术来实现编队运行,完成集体性、系统性运动,具有节能、减低排放和更高效地利用道路容量等优点 [4] [5] 。
然而,在现有的编队运行技术条件下,理想的V2V通信却难以实现。V2V通信中不可避免地因各种原因导致队列车辆遭遇通信故障 [6] ,遭遇通信故障的CAV队列无法维持原有既定行驶状态,甚至会导致碰撞率的上升。当前已有研究着眼于单车通信故障,认为故障引起的速度波动会影响车辆的动态性能,造成交通事故率增大,对交通流有明显的负面影响 [7] 。因此,提前预知非理想通信情况下可能导致的问题,并针对具体问题提出解决方法成为关键 [8] 。Hifner等人研究了故障风险和缓解措施,提出了复杂车辆交互协议,以避免CAV在行驶过程中出现通信故障 [9] 。为了最大限度地减少碰撞和事故,Haridasu等人应用了基于蓝牙的系统,以促进车辆之间的通信并优化车辆队列的行驶过程 [10] 。还有研究者认为,如果不能及时更新信息权重以应对通信故障,将会导致灾难性的后果 [11] ,Wang等人提出非故障车辆重新对可用数据的权重进行分配,同时故障车辆及其前方邻近车辆使用车载传感器获取所需的状态数据,以此来维护数据的可用性。然而,车载传感器并不总是可靠的,因为它们可能会受到天气等恶劣环境的影响 [12] ,这可能导致后继车辆使用不准确的参考值进行控制计算。因此有研究人员事先将可能引入的错误信息如车辆和通信链路的动态不确定性考虑在内,从而提出稳健的协作控制策略 [13] [14] 。
目前,大多数关于CAVs编队运行通信故障问题的研究都集中在数据丢失的预防和缓解,国内外未见研究涉及CAVs编队运行通信故障情况下的数据弥补。因此,为了填补通信故障下CAV队列控制数据弥补研究的空白,本文提出了新的方案,即在连续多车通信故障的情况下,对编队运行中故障车辆所丢失的数据进行弥补。具体来说,包括基于单数据源的弥补策略、基于双数据源的弥补策略和基于多数据源的弥补策略,旨在对数据进行弥补而最大限度地维持队列的原有性能。
本文其余部分的结构如下:第2节介绍理想通信情况下CAVs的编队运行。第3节介绍CAV队列的通信故障及其数据弥补方法。第4节进行数值仿真和性能评估。最后,在第5节中对本工作进行总结。
2. 智能网联车的编队建模
V2V环境下CAVs编队运行的分布式控制结构主要由通信层和车辆层构成,本节将对其通信层的通信拓扑和车辆层的动力学模型进行介绍。
2.1. 通信拓扑结构
理想通信条件下的CAV队列能实现实时精准的信息交互,CAV队列通信系统的成功实施很大程度上依赖于信息的全面可用性。通信拓扑(Communication Topology, CT)在信息交换中至关重要,因为它定义了CAV之间信息传输的起点和终点,用于描述CAVs的交互过程。通常,通信拓扑被描述为一个有向图
,其中
是节点集,代表队列中的车辆;
是边的集合,代表通信连接,A = [aij]是领接矩阵 [15] 。aij的值用于表示从j到i的链路能否成功连接(1:可连接;0:不可连接)。
随着V2V的快速发展,编队研究中出现了多种CT,包括前置跟随通信拓扑(PF-CT)、前置领导跟随通信拓扑(PLF-CT)、双前置领导跟随通信拓扑(TPLF-CT)、M前置跟随通信拓扑(MPF-CT)和M前置领导跟随通信拓扑(MPLF-CT),其中M表示通信范围内的前置数量 [16] [17] 。
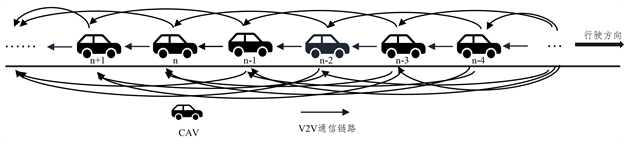
Figure 1. CAV platoon under ideal communication conditions
图1. 理想通信条件下的CAV队列
本文在不失一般性的前提下考虑使用MPF-CT。假设道路上有N辆车,M为4,在没有通信故障即通信条件理想的情况下,车辆间的信息交换路径如图1所示,其中每辆车都能获得完整的数据,其邻接矩阵A可表示为式(1)。
(1)
2.2. 动力学模型
在CAVs编队运行中,CAVs以2.1中通信拓扑所示方式进行数据获取,得到周边车辆信息之后,其动力输出机制由车辆动力方程决定。本研究中所采用的跟驰模型参考 [2] 选用元素较少、物理含义明确的智能驾驶模型(Intelligent Driver Model, IDM)。其动力学模型表达式如式(2)所示:
(2)
式中,s*和s0分别为车辆之间的理想间距和最小安全距离,amax、b、td和v0分别为最大加速度、最大舒适减速度、期望车头时距和自由流车速。
通过引入队列中车与车之间的通信关系,可将式(2)扩展为多信息源按权重求和的形式,如式(3)所示,称为协同式智能驾驶模型(Cooperative Intelligent Driver Model, C-IDM),其更符合CAVs编队运行时的信息交互关系,同时详细表示出车辆在行驶过程中所获取的多个前车信息。
(3)
式中,
为对应车辆信息的权重,权重计算式如式(4)所示:
(4)
式中,M为可与当前车辆n进行V2V通信的车辆数,
为大于1的常数,表示信息加权因子,
的值越大,则与当前车距离较近的车辆的信息权重越大。
3. 多车通信故障及数据弥补策略
交通环境中的众多复杂因素会导致队列通信条件的不理想,如天气、通信区容量、车辆通信硬件、恶意攻击等。通信条件的退化会导致队列中车辆之间的信息交互渠道受损,原有的完整数据产生缺口。此时车辆原有运行状态无法维持,甚至可能会引发不可预期的急剧加减速行为,从而导致相邻纵向车辆之间的碰撞概率显著增加,引发交通事故。
本节使用第2节中的编队驾驶模式,考虑队列由于信号干扰所出现的连续多车故障情况,聚焦于多车通信故障会对CAV编队运行所产生的影响,提出基于单数据源的弥补策略、基于双数据源的弥补策略和基于多数据源的弥补策略共三种方案来进行控制数据的弥补。期望通过数据弥补的方式,解决通信受阻、通信中断等不理想通信情况下的数据缺失问题,以最大程度维持队列的性能,减小其对整体交通流的影响。
3.1. 信故障下的CAV队列
一般情况下,CAV队列以保持相同的速度、稳定的小车间距为运行常态。本节主要介绍队列遇到屏障区时引发的连续多车通信故障,此时CAV队列无法按照原有的编队方式运行,车辆之间无法继续维持稳定的速度和车间距。
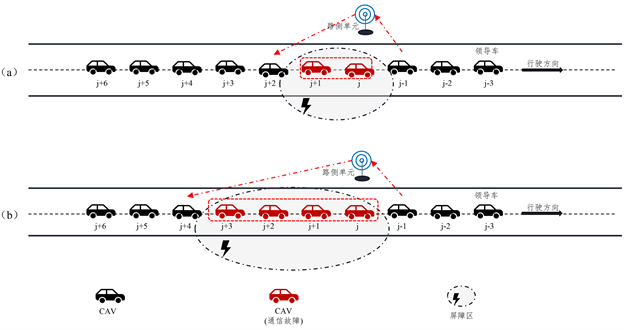
Figure 2. Diagram of continuous multi-vehicle communication failure scenario: (a) R = 2; (b) R = 4
图2. 连续多车故障场景示意图:(a) R = 2;(b) R = 4
本文采用图像对通信故障场景进行示意,如图2所示。以图1所设定的队列为例(N = 10),当队列路过屏障区时,屏障区内车辆的通信功能均受到影响,导致与其相连的车辆无法顺利获取信息,即连续多车通信故障。此时处于V2V范围外的车辆可用借助路侧单元进行状态信息共享,而故障车辆及与其相连的跟随车辆只能通过传感器获取信息,该方式不可避免地将有损数据准确性的感知误差添加到模型的输入参数中。考虑到实际情况的复杂性,本文将屏障区能容下的最大车辆数
定义为故障窗口大小。此外,鉴于领导车信息的重要性,本文假设领导车配备有抗扰能力更强的通信装备,路过屏障区时其信息传输能力不受影响。
用集合
表示故障车的序号,其中j为首辆故障车,则发生故障的CAV跟驰模
型可表示为式(5):
(5)
3.2. 三种典型的数据弥补策略
由第3.1节可得,一旦发生通信故障就会使队列控制数据丢失,因此本文采用数据弥补策略来应对数据缺口问题,以更好地维持编队运行的原有性能。
在CAV队列中,每辆汽车的驾驶状态都是从前往后依序传递的,这种反应可以视为领导车的驾驶动作在空间轴上的后移。跟驰车辆的行为会受到与前车速度差、车间距等因素的制约,使其必须在前车的基础上对行驶状态做出相应的调整。因此,本研究认为,在队列驾驶的过程中,尽管每个时刻、每辆车的状态数据都会被更新,但它们的状态数据之间必然存在特定的耦合关系。
本文将队列中其他可通信且具有较高运动状态参考价值的车辆作为计算弥补值时的数据来源,包括起到队列引领作用的领导车(Vleader)、最新通过屏障区的车辆(Vj−1)以及当前车自身(Vn)。鉴于参考数据的数量可能一定程度上对弥补效果产生影响,本研究根据数据源由近到远和数据从前往后传递的方向,依次增加数,从而提出三种弥补策略,即基于单数据源的弥补策略(只考虑Vj−1信息)、基于双数据源的弥补策略(考虑了Vleader和Vj−1的信息)和基于多数据源的弥补策略(Vleader、Vj−1和Vn均考虑在内)。
用
来表示在计算弥补值时所使用的数据源数量,具体弥补值算法如式(6)~(10)所示:
(6)
(7)
(8)
(9)
(10)
式中,
、
和
分别表示来自Vleader、Vj−1、和Vn的速度信息;表示故障刚开始发生的时刻;
表示模拟时间间隔;
表示计算得出的速度弥补值;
和
分别表示由补偿值进行后续计算而得的加速度和车辆位置。最后,得出故障车辆的弥补数据速度差
和车间距
。
经过以上分析和弥补值的计算后,队列中的通信故障车辆的后方车辆可以获得完整的数据。由此得到可弥补的协同式智能驾驶模型(Compensable Cooperative Intelligent Driver Model, CC-IDM),为CAV队列出现通信故障时提供数据弥补,如式(11)所示:
(11)
式中,
和
是通过弥补机制计算得到的对应故障车信息,分别代表弥补后的当前车与故
障车之间的相对速度差和间距,通过依次计算并求和完成所有故障车辆的数据弥补。
4. 数据弥补策略的交通特性评估
第3节的理论分析说明,在CAV队列遭遇多车通信故障时,队列内部车辆的控制数据会产生缺失,此时利用其他数据源的信息进行弥补,能恢复完整的数据集。为了进一步验证上述弥补机制的有效性,选出弥补效果最佳的弥补方案,本节进行了一系列数值仿真实验和结果分析。
4.1. 评估指标及仿真设定
针对数据丢失对CAV队列性能产生的负面影响,已有研究人员提出了多种参数来进行量化,包括平均速度方差、最小跟踪误差、燃料消耗和加速度的一阶导数 [18] 。本文在前人研究的基础上,将性能评估分为三个方面:车辆跟随性、燃油经济性和驾驶舒适性,从队列整体层次对其性能进行深入探讨。车辆跟随性指标(JT)如公式(12)所示,由间距误差值和速度误差值决定,JT值越小表示跟车性能越好。队列油耗主要受车辆加速度影响,因此燃油经济性指标(JF)如公式(13)所示用加速度和加速度变化率来表示。同样,JF的值越小,表示油耗越少。在驾驶过程中,加速度波动即加速度的变化率越小,驾驶舒适性指标(JC)的值越小,说明乘客感觉越舒适,其表达式如公式(14)所示。
(12)
(13)
(14)
式中,JTn、JFn和JCn分别表示当前车辆n的三种性能指标;es(t)和ev(t)表示当前车辆的间距误差和速度误差;we,wv,wa,wi和wc分别表示间距误差、速度误差、加速度和两个加加速度的权重。仿真实验结果见后续章节,在仿真中we,wv,wa,wi和wc的取值均为1。
仿真设定如下:一个车辆数N为10的CAV队列行驶在一条单车道上。队列中的第一辆车为领导车,其速度曲线由人为设定。加、减速工况下领导车初始速度分别为10 m/s和20 m/s,前10 s以1 m/s2的加速度进行变速运动,10 s后停止变速并按当前速度保持匀速行驶。其余车辆为跟随车,其速度由相应的跟驰模型控制(无故障车辆:C-IDM;有故障未弥补车辆:缺失数据的C-IDM;有故障已弥补的车辆:CC-IDM),其余所需参数参考 [11] 进行设置,详见表1。队列在指定状态行驶的第20 s开始进入故障区并发生连续多车通信故障,其中因通信故障引入的感知误差由公式(15)得,故障窗口由仿真场景进行动态设定。仿真中分别采用基于单数据源、双数据源和多数据源三种弥补方法进行数据弥补。
(15)
4.2. 编队运行交通特性对比分析
本节展示了4.1所述场景下CAV队列在车辆跟随性、燃油经济性和驾驶舒适性三个性能下的指标数值,并对其进行对比和分析。
4.2.1. 车辆跟随性
要研究数据弥补策略对于队列车辆跟随性的提升效果,需要用相同模型参数情况下发生故障但未进行数据弥补的性能指标来对比验证数据弥补是否具有改善故障队列性能的作用,同时与未发生故障的理想通信状态的性能指标进行对比,以研究数据弥补是否完全弥补了因数据丢失而降低的性能。
 (a) 加速工况
(a) 加速工况 (b) 减速工况
(b) 减速工况
Figure 3. Results of performance of vehicle following index in different conditions
图3. 不同情况下队列的车辆跟随性指标结果
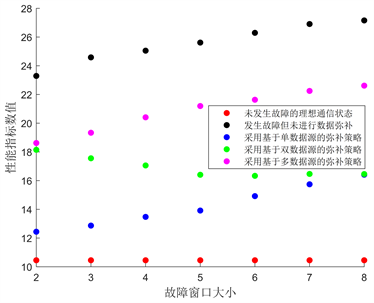
图3所示为不同情况下的性能指标数值,其中图3(a)为加速工况,图3(b)为减速工况。从图3(a)和图3(b)可以看出未发生故障的通信理想状态下的数值最小,即性能最佳,且始终保持在固定值,可将其视作基准状态。而发生故障但未进行数据弥补情况与基准状态差距最大,不同故障窗口大小情况下都为最大值,表明该情况下队列的车辆跟随性能最差。此外,观察基于单数据源的数据弥补方法、基于双数据源的弥补策略和基于多数据源的弥补策略,三者均在无数据弥补的基础上有所降低,说明对数据进行弥补可以改善通信故障下队列的车辆跟随性。三种弥补策略之间进行对比,只有基于单数据源和双数据源的弥补方法效果不受窗口大小的影响,而基于多数据源的弥补方法会随着窗口大小的增加逐渐向未进行弥补的情况靠近,这是因为随着故障窗口增加,Vn与故障车之间的信息偏差也在增加,于是弥补效果受到影响。因此,车辆跟随性看,采用基于单数据源和双数据源的数据弥补策略所得结果更接近于通信理想状态,具有更好的弥补效果。
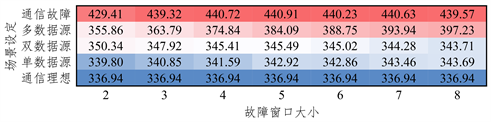
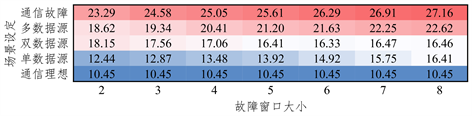
图4所示为队列加速(a)和减速(b)工况下的性能指标数值,图中蓝色为低数值,红色为高数值,由蓝向红的渐变表示的是性能逐渐恶化的变化趋势。纵向从下往上依次为:未发生故障的理想通信状态、采用基于单数据源的弥补策略、采用基于双数据源的弥补策略、采用基于多数据源的弥补策略和发生故障但未进行数据弥补的情况(图6、图8同)。从两幅子图的垂直方向看,不同场景下的数值总体呈现依次增大的趋势;同样地,从水平方向看,故障窗口越大,数值越大,说明队列性能的退化越严重。通过对比可得弥补策略效果由优到劣的顺序依次为:基于单数据源的弥补策略、基于双数据源的弥补策略、基于多数据源的弥补策略,与图3所示结果相对应。这是因为在队列经过屏障区时,基于单数据源的弥补策略所使用的信息来源,即最新通过屏障区的车辆(Vj−1),同样也是首辆故障车的邻近前车,其交通状态与后方正处于屏障区内的故障CAVs最相似,在弥补时能达到最佳效果,而基于双数据源的弥补策略、基于多数据源的弥补策略在依次添加领导车和本车的信息后偏差值增加,因此改善效果逐渐减小。
 (a) 加速工况
(a) 加速工况 (b) 减速工况
(b) 减速工况
Figure 4. The variation result of vehicle following index value with fault window and scene
图4. 车辆跟随性指标数值随故障窗口和场景变化的结果
4.2.2. 燃油经济性
本节从燃油经济性对结果进行分析,其数值结果主要受到队列行驶过程中变速行为的影响。同样地,在三种弥补策略的基础上增加了发生故障但未进行数据弥补和未发生故障的理想状态进行对比。
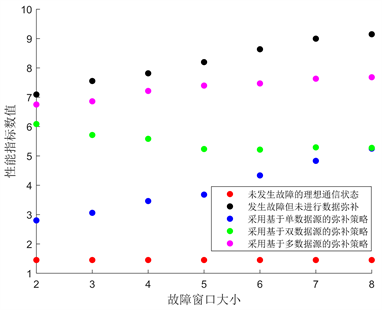
图5所示为燃油经济性能指标值分布。同样地,在图5(a)和图5(b)中,数值最小的为通信理想状态情况,以此为基准,从小到大依次为:基于单数据源的弥补策略、基于双数据源的弥补策略、基于多数据源的弥补策略、未进行数据弥补情况,表明三种弥补方法均在燃油经济性能方面有改善作用。对比图5(a)和图5(b)发现,在速度范围相对更大的加速工况(图5(a))中,随着故障窗口的增加,基于单数据源和双数据源的弥补策略结果逐渐靠近,这是因为窗口越大,队列中Vj−1和Vleader的位置越接近,双方的行驶状态也更相似。而图5(b)两者结果差别相对更小,这是因为减速工况处于更小的速度范围,其调控速度时产生的加减速行为更不明显。两种工况下,基于单数据源的弥补策略的结果均最接近理想状态,再次印证基于单数据源的弥补策略弥补效果最好。
 (a) 加速工况
(a) 加速工况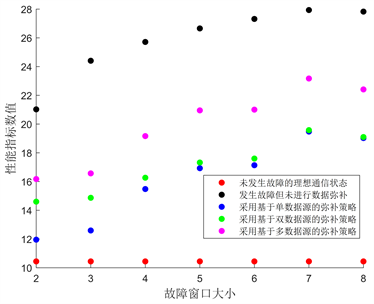 (b) 减速工况
(b) 减速工况
Figure 5. Results of performance of fuel economy index in different conditions
图5. 不同情况下队列的燃油经济性指标结果
图6所示为每个场景下得到的性能指标数据,颜色逐渐由蓝变红,即数值由小变大,与图4所呈现的趋势相似。除理想通信状态外,横向观察,故障车数量越多,得到的性能指标数值越大,说明性能越差;纵向观察,性能指标数值由小到大依次为:通信理想状态、基于单数据源的弥补策略、基于双数据源的弥补策略、基于多数据源的弥补策略、未进行数据弥补情况。表明采用基于单数据源的弥补策略时,队列能得到最佳的弥补效果。
 (a) 加速工况
(a) 加速工况 (b) 减速工况
(b) 减速工况
Figure 6. The variation result of fuel economy index value with fault window and scene
图6. 燃油经济性指标数值随故障窗口和场景变化的结果
4.2.3. 驾驶舒适性
本节从驾驶舒适性对结果进行分析,其数值结果主要受到队列加速过程中加速度变化率的影响。如图7所示,在通信故障期间,即使已经对所缺失数据进行弥补,但由于行驶过程中需要不断地对行驶状态进行调控,因此车辆的加速度变化较频繁,三种弥补策略所获结果与通信理想状态相比数值较大,其中基于多数据源的弥补策略在驾驶舒适性的改善上效果最小。相反地,基于单数据源的弥补策略具有最显著的弥补效果。表明基于单数据源的弥补策略在驾驶舒适性能方面具有最佳的弥补效果。
 (a) 加速工况
(a) 加速工况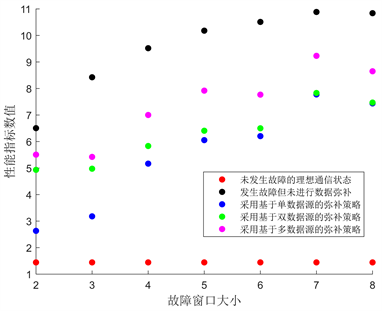 (b) 减速工况
(b) 减速工况
Figure 7. Results of performance of driving comfort index in different conditions
图7. 不同情况下队列的驾驶舒适性指标结果
 (a) 加速工况
(a) 加速工况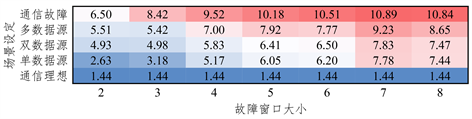 (b) 减速工况
(b) 减速工况
Figure 8. The variation result of driving comfort index value with fault window and scene
图8. 驾驶舒适性指标数值随故障窗口和场景的变化结果
图8所示结果与图7相对应,数据表从左往右、从下往上趋势为颜色由蓝变红,数值逐渐增大。原因是队列性能所受负面影响的程度与故障窗口的大小呈正相关;而弥补机制下的基于单数据源、双数据源、多数据源的弥补策略弥补效果逐次降低,即基于单数据源的弥补策略具有最佳弥补效果。
以上结果表明,数据的缺失会导致CAV队列的车辆跟随性、燃油经济性和驾驶舒适性三方面性能出现下降;而使用弥补策略可以让性能再次回升。其中车辆跟随性更多地反映队列之间的行驶状态误差,该跟驰行为上的误差很大程度上决定了整个交通系统的运行状态,将其作为本研究主要的性能判别准则,结果表明该性能的改善中基于单数据源和双数据源的弥补策略数据效果最明显,说明弥补策略的有效性最高。相对而言,燃油经济性和驾驶舒适性更多反映的是队列的速度变化率以及变化率的变化,导致两方面性能降低的原因除了数据缺失带来的信息变化冲击外,还有通信故障期间对车辆行驶状态不断调控过程带来的持续波动。因此将两者作为辅助的性能判别标准。结果表明性能的改善中基于单数据源的弥补策略数据效果最佳。综上,基于单数据源的弥补策略为最佳弥补策略。
5. 总结
本文针对CAVs编队行驶过程中连续多车通信故障引发数据丢失的问题,提出了三种数据弥补策略,以增强CAVs的编队运行性能维持能力,并从车辆跟随性、燃油经济性和驾驶舒适性对三种弥补策略进行对比,以选出最佳弥补策略。具体来说,本文提出了基于单数据源、基于双数据源和基于多数据源的数据弥补策略。数值仿真结果表明,三种数据弥补策略均可以缓解通信故障所造成的队列性能退化。当只关注车辆跟随性时,单数据源和双数据源均起到良好的性能改善作用;当综合考虑车辆跟随性、燃油经济性和驾驶舒适性后,基于单数据源的弥补策略具有明显的最佳弥补效果。本研究为未来通信故障导致的数据缺失问题提供了详细的数据弥补方案。当需要对某项数据进行补充时,可以利用周围车辆中交通状况最为相似的数据源的有效信息,优先考虑采用单数据源的弥补策略,若存在其他需求再考虑增加数据源来调整弥补值。
基金项目
国家自然科学基金的资助(资助号:61773290);上海市2021年度“科技创新行动计划”启明星项目(项目编号:21QB1404300)。
参考文献