1. 引言
Markov跳变系统是一类系统模态受Markov过程驱动的混杂系统,广泛应用于航空航天、化工生产、生物医疗等多个领域 [1] [2] 。然而,在实际应用过程中,由于系统所处网络环境具有开放共享式属性,经常导致系统遭到恶意的网络攻击,如通过阻止信号传输攻击系统的DoS攻击、通过注入虚假信息攻击系统的欺骗攻击等。尤其是DoS攻击,因其实施成本低、灵活性强等特点,已成为当前最具威胁性的网络攻击。众所周知,稳定是系统正常运行的基本前提,而网络攻击的存在,使得系统的稳定面临巨大威胁。因此近年来,关于DoS攻击下Markov跳变系统的稳定性问题已成为国内外学者的研究热点。
目前,国内外学者基于零输入策略 [3] 或保持输入策略 [4] ,结合模糊控制 [5] 、异步控制 [6] 、采样控制 [7] 或事件触发控制 [8] [9] [10] [11] [12] 等方法,针对DoS攻击下Markov跳变系统的稳定性问题进行了广泛探索。具体来说,文献 [5] 针对DoS和欺骗攻击下的非齐次马尔可夫跳变电力系统,提出了一种自适应模糊异步控制方法;文献 [6] 采用异步控制器克服了由DoS攻击导致的被控对象模态和控制器模态不匹配的现象;文献 [7] 针对异构多智能体系统网络中存在DoS攻击的情况,基于随机采样数据设计了输出反馈一致性控制器;文献 [8] [9] [10] [11] [12] 利用动态事件触发控制研究了DoS攻击下Markov跳变系统的稳定性问题。值得注意的是,模糊控制和异步控制作为一种连续控制方案,需要一直占用通信信道,极易造成通信资源的浪费;采样控制作为一种离散控制方案,只需要在采样时刻占用通信信道,该方案虽然能够克服连续控制的不足,但不能按需决定触发时刻;而事件触发机制仅将满足所设条件的数据传输到网络中,使得网络资源得到合理的利用,其性能优于采样控制。综上所述,利用事件触发机制研究DoS攻击下Markov跳变系统的稳定性问题具有重要的理论和现实意义。
需要指出的是,由于采样控制方法是一类按时控制策略,难以解决按需控制的问题,极易造成网络资源的不必要浪费,因此具有较大的保守性。而在事件触发控制方法中,只有当系统状态满足预设的触发条件时才会被控制,从而在一定程度上克服了采样控制的不足。值得一提的是,根据触发参数的类型,事件触发控制分为静态事件触发控制 [13] [14] [15] 和动态事件触发控制 [16] 。相比静态事件触发控制,动态事件触发控制通过引入一个非负的内部动态变量,有效降低了系统状态的传输频率,从而进一步提高了资源利用率,因此动态事件触发控制方法具有较小的保守性。然而,DoS攻击下Markov跳变系统的动态事件触发控制问题尚未得到充分考虑,这给本文提供了良好的研究契机。
基于上述讨论,本文将深入研究DoS攻击下Markov跳变系统的动态事件触发控制问题,首先根据DoS攻击的物理特性,将DoS攻击下的Markov跳变系统建模为一类混杂切换系统;然后考虑Markov跳变参数和事件触发时刻信息,构造一类新的公共Lyapunov泛函,紧接着利用积分不等式方法和其他分析技巧,结合零输入策略和动态事件触发机制,建立保守性较低的安全控制方案;最后,通过一个仿真例子说明本文方法的有效性。
符号说明:
和
分别表示
的实矩阵和n维欧几里德空间。
和
分别表示实数集和自然数集。
。
表示
是正定矩阵。符号
表示对称矩阵中的对称项。
2. 问题描述
2.1. 系统描述
考虑以下Markov跳变系统:
(1)
其中
系统的状态向量,
是系统的控制输入,
和
是已知的常数矩阵。
是在有限集
中取值的Markov过程。转移速率矩阵
满足:
其中
,
。
表示系统从模态i到模态q的变化速率,且满足
。为了方便,本文记
,
,
,
,其他依次类推。
定义1 [17] . 如果存在常数
和
,满足
,则称Markov跳变系统 是均方指数稳定的。
定义2 [18] . Lyapunov泛函
的无穷小算子定义如下:
引理1 [19] . 对满足
的标量
和
和对称正定矩阵G,下列不等式成立:
其中
,
,
。
引理2 [19] . 对标量
、对称正定矩阵
和
以及矩阵
,下列矩阵不等式成立:
其中
,
,
。
2.2. 动态事件触发机制

Figure 1. The framework of Markov jump systems under DoS attacks
图1. DoS攻击下Markov跳变系统的框架
如图1所示,假设系统在零阶保持器和执行器之间的控制信道中遭受周期性DoS攻击,且
表示DoS攻击的第
个周期,
表示DoS攻击的休眠期,
表示DoS攻击的活动期,其中
,
,
。本文针对DoS攻击在周期采样的基础上构建了以下动态事件触发规则:采样器以固定周期
对系统状态进行采样,其中
为采样时刻,然后由事件生成器判定每个采样时刻是否满足下列预定的动态事件触发条件,只有满足触发条件的采样数据才会被传输到控制器。在DoS攻击的第
个休眠期内,k表示该休眠期内的触发次数,
是第k次触发时刻,
是
之后最近的触发时刻。为了方便,在本文中用
和
分别表示
和
。
和
满足如下动态事件触发规则:
(2)
其中
,
,
,
,
,
。
是当前采样状态和最新触发状态之间的误差。
是给定的常数,S是待确定的权重矩阵。
是动态变量,其定义如下:
(3)
其中
和
是已知的常数,
是待确定的权重矩阵,且初始条件为
。
备注1. 由于DETM (2)是在周期采样的基础上进行的,因此自动避免了芝诺现象的发生。
引理3 [20] . 对
,对于给定的常数
和矩阵
,如果
,则定义(3)中的动态变量
满足
。
由于DoS攻击会影响闭环系统中的数据传输,因此本文在DoS攻击的活动期采用零输入策略,在DoS攻击的休眠期内采用动态事件触发控制策略。在此基础上,控制器可以设计如下:
(4)
其中
是待确定的控制器增益矩阵。
2.3. 切换系统模型
接下来采用输入时滞方法将休眠期内两个连续触发时刻之间的间隔被划分为以下采样间隔。
定义
,并且用
表示
。当
时,
(5)
定义
,并且用
和
分别表示
和
。当
时,
(6)
根据(5)式和(6)式中划分的采样间隔,定义以下两个分段函数:
(7)
其中对
,
;对
,
。在本文中,
,
。
(8)
其中
。
由(7)和(8)可得,对
,成功触发的采样状态可以表达为:
(9)
定义
,
。我们可以得到如下切换Markov跳变系统:
(10)
3. 主要结论
下面利用线性矩阵不等式方法给出了系统(10)均方指数稳定性判据,并得到了事件触发参数和控制器增益矩阵。为了方便描述,定义:
定理1. 对给的正标量
和
,满足引理3和
,Markov跳变系统(10)是均方指数稳定的,如果存在具有适当维数的对称矩阵
和矩阵
满足对
和
,下列矩阵不等式成立:
(11)
其中
且事件触发参数和控制器增益矩阵分别为
、
和
。
证明:构造一个通用的Lyapunov泛函:
(12)
其中
,且矩阵
,
和
具有适当的维数。为了方便,我们用
表
。
根据定义2,
沿着系统(10)的无穷小算子为
(13)
在DoS攻击的休眠期:根据引理1和2,有
(14)
其中
当t时刻不满足触发规则(2)时,根据(2)和(9)可得
(15)
由(12)、(13)、(14)和(15),可得
(16)
其中
在DoS攻击的活动期:根据引理1和2,有
(17)
其中
令
,则
,由引理3可得
(18)
从(12)、(13)、(17)和(18)有
(19)
其中
定义
,
和
。用Schur补和不等式
,
等价于
(20)
定义
,
,
和
。(20)式前后同乘以
,可得(11)。
由(11)、(19)和(16)可得
(21)
由(21)可得
(22)
讨论以下两种情况:
情况1:对
,由
和(22)可得
由
和
得
(23)
情况2:对
,从(22)可得
从
和
可得
(24)
由(12)可得存在标量
满足
(25)
其中
,
,
。
对于给定的
和
,存在一个标量
满足
。由(23)、(24)和(25)知,存在
和
,满足
因此,系统(10)是均方指数稳定的。
4. 仿真实验
使用如图2所示的机器人机器臂来验证本文方法的有效性,其动力学方程如下 [20] :
(26)
其中q和
分别表示连杆的角度和角速度,u表示控制输入,
表示外部扰动,M是连杆的质量,J是电动机的转动惯量,D是阻尼系数,l是关节轴到质心的距离,g是重力加速度。我们取系统(26)中的参数为
和
。在零附近线性化系统(26),可得
其中
,
,
,
。然后,我们设置
,
,
,
,
,
,
,
,
,
,
。可得控制器增益矩阵和权重矩阵为:
图3~6分别表示DETM机制下的状态响应、控制输入、触发时刻与触发间隔之间的关系以及动态参数
的变化趋势;图7表示系统在不加控制时的状态响应。由图3和图7可知,本文采用的DETM能使系统在DoS攻击下达到稳定状态。由图4可知,在DoS的活动期内控制输入为零,且系统稳定后控制输入保持为零。由图5可知最大触发间隔大约为1.45 s。由图6可知动态参数
整体呈下降趋势。
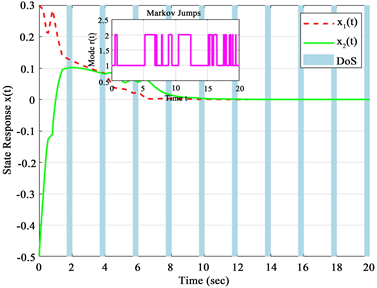
Figure 3. The state response under DETM
图3. DETM下的状态响应
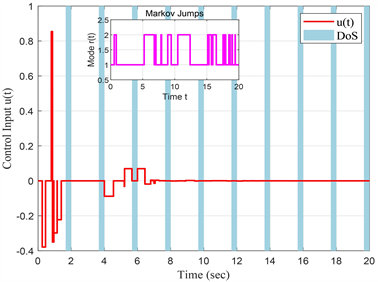
Figure 4. The control input under DETM
图4. DETM下的控制输入
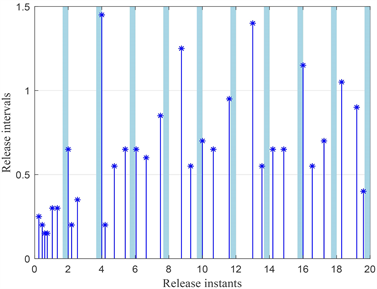
Figure 5. The relationship between trigger instant and trigger interval under DETM
图5. DETM机制下触发时刻和触发间隔之间的关系

Figure 7. The state response of the system without control
图7. 系统在不加控制时的状态响应
5. 结论
本文利用DETM研究了DoS攻击下Markov跳变系统的镇定性问题。通过构造一类公共的Lyapunov泛函,结合零输入策略和DETM,使用积分不等式方法和其他分析技巧得到了保守性较低的稳定性准则,设计了新的控制方案。最后,通过一个仿真实例论证了该方法的实用性和有效性。在未来的工作中,作者将进一步研究含DoS攻击成功率信息的Markov跳变系统的相关问题。
基金项目
第一通讯作者受到云南省科技厅基础研究青年基金项目202101AU070050和云南省教育厅科研基金项目2022J0447的部分资助。第二通讯作者受到了国家自然科学基金项目12061088的资助。
NOTES
*通讯作者。