1. 引言
近年来,随着几场地区冲突的发生,无人机在战争中的作用日益凸显,特别是在2020年亚美尼亚与阿塞拜疆的冲突中,无人机发挥了至关重要的作用,证明了无人机在现代战争中的巨大潜力 [1] 。单架无人机战斗力有限,依托于现代通信技术、人工智能、边缘计算等新兴技术,几十上百甚至几千架多种类无人机组成集群,形成无人机空中战斗体系,对敌展开饱和式打击,将极大提升无人机战斗力,在大国战争博弈中发挥重要作用 [2] [3] [4] [5] [6] 。
无人机组成集群飞行时,排除与敌对抗的因素,自身飞行安全也面临成员之间相互干扰、相撞等风险,集群成员越多、集群越密集,自身飞行风险越大。无人机集群飞行安全受多种因素影响,包括机械因素、通信因素、环境因素、集群因素、人为因素等,每一项又包含若干子项,如机械因素包含机械故障、动力故障、飞控故障、航电故障等,环境因素包含结冰、侧风、电磁干扰等 [6] [7] [8] 。多种因素作用于无人机集群,需要依据科学的方法,分清楚主要因素、次要因素,在无人机飞行试验中,根据因素的重要程度,投予不同的关注度,更加高效、可靠地保障无人机集群飞行安全。
决策试验评估实验室方法(Decision Making Trial and Evaluation Laboratory, DEMATEL)是一种系统分析方法,可用于分析复杂问题中各维度要素之间的因果关系和关联,得到各个要素对其他要素的影响度与被影响度,进而得到要素的中心度与原因度,确定其在系统中的重要程度 [9] [10] [11] 。
解释结构模型(Interpretive Structural Modeling, ISM)是一种结构化分析方法,将复杂的问题通过层次化分解,根据影响关系形成层次分明的有向拓朴图,直观显示各个层级要素的主次关系 [12] [13] 。AISM模型是在ISM模型基础上,引入博弈对抗(Adversarial)思想,在ISM以结果优先要素层级划分的规则上,加入与之对立的以原因优先的要素层级划分规则,建立一组对抗的层级划分有向图,以两种不同的角度分析各个要素的重要程度 [10] [14] [15] 。
本文将通过文献调查、专家咨询等方式,结合本单位长期飞行试验的数据积累,对影响无人机集群飞行安全的因素进行识别与归纳。在此基础上,采用DEMATEL-AISM方法进行分析,确定影响无人机集群飞行安全的关键影响因素,明确各因素之间的影响关系,为无人机集群飞行安全控制提供合理建议。
2. 无人机集群飞行安全影响因素识别
通过专家咨询、文献调研,结合本单位过去的飞行试验经验,将影响无人机集群飞行安全的因素分为机械因素、通信因素、环境因素、集群因素、人为因素5类,每类因素的具体内涵及对飞行安全的影响方式如表1所示。

Table 1. Table of factors affecting the flight safety of UAV swarms
表1. 无人机集群飞行安全影响因素表
3. 无人机集群飞行安全影响因素DEMATEL-AISM模型构建
3.1. DEMATEL模型构建
设无人机集群飞行安全影响因素的集合为F,根据其相互之间的影响关系,建立直接影响矩阵O,行坐标因素为影响因素,用
表示;列坐标因素为被影响因素,用
表示;矩阵元素
表示行因素
对列因素
的影响程度。
数值用0~4表示,意义如表2所示。
Table 2. Evaluating numeric semantic scales
表2. 评价数字语义标度
邀请20名无人机方面的专家,对无人机集群飞行安全影响因素两两之间的关系矩阵O进行打分。采用德尔菲法进行调研,经多轮迭代后,专家打分趋近相同。最后采用投票法决定矩阵O中元素
的数值,即采用专家评分次数最多的分值作为
的值。最终得到评分矩阵如式(1)所示。
(1)
对矩阵O进行归一化处理,得到规范影响矩阵N,计算公式如式(2)所示。
(2)
式中,n为无人机集群飞行安全影响因素个数,本文有n = 19。
根据规范影响矩阵,考虑无人机集群飞行安全影响因素之间的直接与间接作用,建立综合影响矩阵T,计算公式如(3)所示。
(3)
式中,I为单位矩阵。
根据矩阵T,计算各个影响因素的影响度与被影响度。影响度指该因素对其他因素影响的程度,被影响度指该因素被其他因素影响的程度。影响度越大,说明因素
对其他因素的影响程度越大,被影响度越大,说明因素
被其他因素影响程度越大。设因素
的影响度为
,被影响度为
,计算公式为:
(4)
可以看到,因素
的影响度为其行因素之和,被影响度为其列因素之和。
根据因素
的影响度
,与被影响度
,可以计算出因素
的中心度
与原因度
。二者计算公式为:
(5)
可以看到,中心度
为影响度
与被影响度
之和,表示因素
与其他因素的关联程度,
越大,因素
与其他因素关联越紧密,地位节点越重要;原因
表示因素
与其他因素的因果关系,当
时,表示因素
对其他因素影响程度大于其被影响程度,因素
为原因因素;当
时,表示因素
对其他因素的影响程度小于其被影响程度,因素
为结果因素。表3为根据矩阵T计算得到各因素的中心度与原因度。
Table 3. List of centrality and causality factor
表3. 因素中心度及原因度列表
3.2. AISM模型构建
AISM模型构建过程如图1所示。
图1. AISM模型构建过程
图1中A为邻接矩阵,表示各个因素之间直接影响关系,其关系用0与1表示,0表示无直接影响关系,1表示有直接影响关系。M为可达矩阵,由邻接矩阵A计算得到。根据相应分级算法,将M以结果优先(up算法)和以原因优先(down算法)分别进行分级,之后再对M进行缩点运算,去除矩阵中存在回路关系的因素,形成矩阵M’。之后再去除M’中因素之间越级重复关联关系,形成骨架矩阵S,最后根据骨架矩阵S与up/down算法划分出的分级因素,绘制拓朴层级图,简单直观的表现各因素关系。
AISM模型构建中的邻接矩阵A为布尔矩阵,可以由矩阵T转化得到。引入截止阈值
,对于矩阵A,有:
(6)
式中,
,
为矩阵T各因素的平均值,
为标准差。根据式(6)计算得到邻接矩阵如式(7)所示。
(7)
根据邻接矩阵A,计算得到可达矩阵M:
(8)
由可达矩阵M可以得到因素
的可达集
、先行集
、共同集
,各自定义为:
(9)
由可达集
、先行集
、共同集
可以求得矩阵M的起始集
与终止集
,有:
(10)
以结果优先划分矩阵M时,层级集合
;以原因优先划分矩阵M时,层级集合
。之后在矩阵M中去除
所含的因素,再执行式(9) (10)操作,划分出下一级层级
。重复以上步骤,直到
,完成因素层级划分。表4为影响因素层级划分结果。
Table 4. Table of AISM stratification factors
表4. AISM分层因素表
4. 建模结果分析
图2为根据表3得到的各因素的中心度与原因度散点分布图,横坐标为中心度,纵坐标为原因度。可以看到,因素D3集群飞行动作与D5集群编队方式的中心度最大,因素E2人为操作失误的中心度次之。由此可知,无人机集群的飞行动作与编队方式对在集群飞行安全影响因素中占据中心节点位置,其变化与多种因素关联,人为操作失误次之。在无人机集群飞行中,应将集群飞行动作与编队方式作为重点监控对象。因素C1低温结冰与C2侧风的中心度最小,表明二者对无人机集群飞行安全的影响是独立性的,二者的变化并不会传递到其他因素。
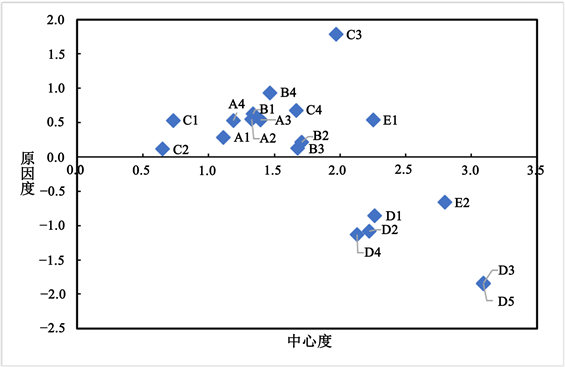
Figure 2. Summary graph of element centrality and reasonability
图2. 元素中心度、原因度汇总图
因素C3电磁干扰的原因度最高,说明电磁干扰对其他因素的影响程度最大,电磁干扰作为主动因素,其改变会影响到其他多种因素。C2侧风与B3通信延时过长原因度接近于0,说明二者对其他因素的综合影响程度小。D3集群飞行动作与D5集群编队方式原因度为负数,且绝对值最大,说明其受其他因素影响程度最大,多种因素的变化最终反映在D3与D5的变化上。
图3、图4为根据表4得到无人机集群安全影响因素分级拓朴图,其中图3以结果优先划分,图4以原因优先划分。根据表4,将安全因素共分为8个层级,加上无人机集群飞行安全这个结果因素,在图3、图4中共体现为9个因素层级。在图中,越上层的因素结果属性越强,即表示该因素被影响属性越大,且对无人机集群飞行安全的影响越直接,是影响无人机集群飞行安全的直接影响因素;越下层因素原因属性越强,即表示该因素影响属性越大,是影响无人机集群飞行安全的本质因素;中间层因素为过渡因素,本质因素变化,通过中间层过渡因素的传递,最终体现在直接影响因素的变化上。
此外,还可以看到,A2航电故障与B4导航信息丢失、E1飞行任务设计不合理与E2人为操作失误为强关联因素,即二者变化相互影响,可以用其中一个因素的变化来表征二者在无人机集群飞行安全中的影响。C1低温结冰与C2侧风属于独立因素,即其不与其他因素发生作用,只直接影响最终的无人机集群飞行安全。从工程原理角度分析,A2航电故障发生时,B4导航信息大概率丢失,而B4导航信息丢失,同时也大概率意味着航电发生故障;E1飞行任务设计不合理,也可归为人为原因,而E2人为操作失误,代表着飞行任务发生不可预测的变化,与E1产生的后果等价;因此,A2与B4、E1与E2可以看成等价因素。而C1低温结冰与C2侧风属于外界环境因素,从物理角度分析,与其他影响无人机飞行安全的因素关系不大,因此独立影响无人机集群飞行安全。
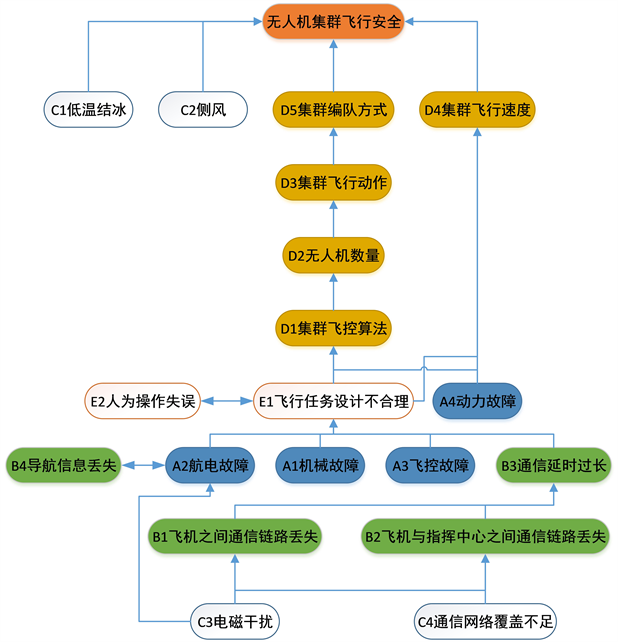
Figure 3. Hierarchical topology map of influencing factors with results prioritizing
图3. 以结果优先影响因素分级拓朴图
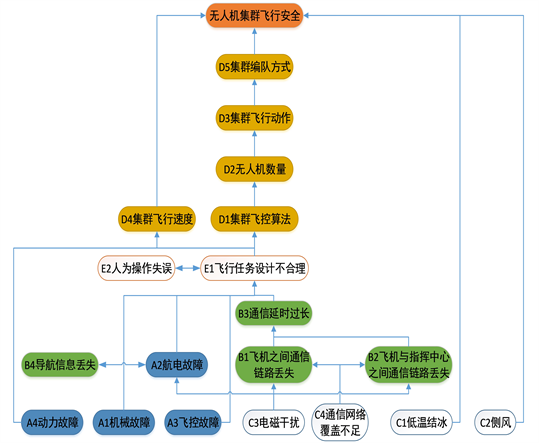
Figure 4. Hierarchical topology map of influencing factors with causes prioritizing
图4. 以原因优先影响因素分级拓朴图
从图3可以看到,表1中集群因素主要为直接影响因素,即其变化会直接影响到无人机集群飞行安全。如果对无人机集群飞行安全进行实时监控,应重点关注集群因素,特别是D4集群飞行速度与D5集群编队方式的变化,会直接影响无人机集群飞行安全性。从工程角度分析,D1集群飞控算法、D2无人机数量、D3集群飞行动作的影响效果,最终都反映在D5集群编队方式上,因此D5作为直接影响因素,影响无人机集群飞行安全。D4集群飞行速度的变化,影响集群遇到问题时做出反应的时间,与其他集群因素相对独立,飞行速度越快,反应时间越短,很可能造成集群无法做出正确动作,从而发生不可测风险,因此D4也直接影响集群飞行安全。
从图4可以看到,环境因素与机械因素主要为本质因素,即其是影响无人机集群飞行安全的本质变量。从工程角度分析,机械因素与环境因素是无人机集群飞行安全的主要输入因素,即引发其他安全因素变化的原因通常是机械或环境因素的变化,因此,如果从设计角度加强无人机集群飞行安全性,应重点从环境因素与机械因素两方面考虑,可以从根源上解决影响无人机集群飞行安全的不利因素。
通信因素与人为因素主要为过渡因素,在无人机集群飞行因素设计中,采用合适的通信因素与人为因素控制策略,可以中断由本质因素引起的不利于安全影响传递,从而提高无人机集群飞行的安全性。
5. 总结
根据DEMATEL-AISM方法对无人机集群飞行的安全影响因素分析结果,得到以下结论:
1) D3集群飞行动作与D5集群编队方式中心度最大,是无人机集群飞行安全的中心节点因素,其变化关系到其他多种因素的变化;
2) C1低温结冰与C2侧风中心度最小,二者为独立因素,不与其他因素发生关系,只影响最后的无人机集群飞行安全;
3) C3电磁干扰的原因度最大,其变化会传递影响到其他多个因素;D3集群飞行动作与D5集群编队方式的被影响度最大,二者的变化是其他多种因素变化的结果;
4) 集群因素主要为直接影响因素,其变化直接影响无人机集群飞行安全,特别是D4集群飞行速度与D5集群编队方式,二者的变化上可以直接反映出无人机集群飞行安全性的变化;
5) 机械因素与环境因素主要为本质因素,是影响无人机集群飞行安全的本质变量,消除二者的不利影响,可以从根源上消除影响无人机飞行安全的不利因素;
6) 通信因素与人为因素主要为过渡因素,对二都采用合适的控制策略,可以阻断不利影响的传播,增强无人机集群飞行安全性;
7) 采用DEMATEL-AISM方法可以将复杂的多因素关联问题梳理清楚,明确各因素之间主次关系,找出核心因素加以重点关注,在航空试验领域有广泛的应用前景。