1. 引言
工程机械是推进城市化进程的重要工具,如挖掘机、起重机、旋挖钻机等都是城市里各种施工建设中被广泛使用的大型机械,它们上车的转动惯量均比较大 [1] 。近些年,国家从政策上为环境的治理和改善持续赋能,为让“双碳”战略尽早实现,环境友好型机械的创新有着重要现实意义。液压系统具有功率重量比大以及易实现无极调速的优势,所以上述各类工程机械大多使用液压系统进行传动,另一方面,这类工程机械在作业时能耗也普遍较大 [2] 。液压二次调节技术实则属于泵控系统,其结构如图1所示,该结构的优势在于可以实现理论上的无节流损失,将其应用于大惯量回转系统中,可以回收发动机多余功率和回转机构制动前的转动能,并将其转换成液压能存储于液压蓄能器中,用以下一次回转对上车回转的驱动 [3] 。
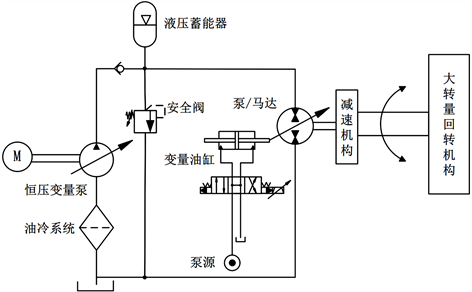
Figure 1. Structure diagram of large inertia rotary system based on hydraulic secondary regulation technology
图1. 基于液压二次调节技术的大惯量回转系统结构图
大型工程机械在作业时,其实际工况条件是极其复杂,这会导致系统存在不匹配扰动和参数不确定性等问题,这主要由于系统中摩擦、泄漏以及液压油体积模量等液压参数一直在变化导致的 [4] ,目前,上述的一些问题尚未得到有效的解决。本文将预定性能自适应鲁棒控制算法应用于对大转量回转机构的角度跟踪控制中,通过将预定性能和自适应鲁棒器相结合,实现大惯量回转机构在复杂干扰条件下的高精度控制。
2. 系统建模
如图1所示,基于液压二次调节技术的大惯量回转系统主要由恒压变量泵、泵/马达、蓄能器、减速机构等元件组成,恒压变量泵为系统供应稳定高压油源并驱动泵/马达转动,泵/马达输出力矩通过减速机构带动大惯量回转机构转动,该力矩平衡方程为 [5] :
(1)
其中,
恒压变量泵输出的高压油源压力;
泵/马达最大排量;
泵/马达机械效率;
减速机构的效率;
泵/马达斜盘的最大倾角;J大惯量回转机构的回转惯量;i减速机构减速比;B回转阻尼;θ回转机构的回转角度;
系统的常值干扰阻力矩;
系统未建模误差以及干扰补偿。
定义状态变量
,则整个系统可以用以下状态空间方程来表述:
(2)
其中
回转角度;
回转角速度;
变量缸活塞有效作用面积;
伺服阀阀流量增益;
变量液压缸最大位移量;
,可以被当作系统的常值干扰。
3. 预定性能自适应鲁棒控制器设计
3.1. 参数自适应算法设计
在工程机械进行作业时,系统的参数会随着工况的变化而改变,为了降低系统参数不确定性以及提高系统的跟踪特性,本文在控制器的设计中引入参数自适应算法 [6] 。首先,定义一组未知的参数集:
,其中
,
,
。由此可以得出,描述
系统的状态空间方程(2)可改为如下式(3):
(3)
在对控制器进行设计之前,需要有如下假设:
假设1:期望回转的角度有界。此外,系统未建模误差以及干扰补偿有界,即:
(4)
其中,
为正数。
假设2:系统参数的波动范围如下:
(5)
其中,
为各个参数的下界,
为各个参数的上界,并且各个参数的上下界均已全部已知。
定义如下映射函数:
(6)
其中,向量
为参数
的自适应估计值。
是待合成的自适应函数,通过应用如下自适应律:
(7)
其中,
是正定的对角矩阵,那么对于任何函数
,本文会在后续的控制器设计中给出,该自适应律满足以下关系:
(8)
其中,
表示对该元素的估计误差。式(8)表示各个参数的估计均有界。
3.2. 控制器设计
首先,进行预定性能控制部分的设计,定义跟踪误差
严格满足以下不等式(9):
(9)
其中,
,需要被合理的设定。性能函数
设计如下式(10):
(10)
上式(10)中,
、
、k均是正常数,也应被合理的设定。
可将跟踪误差的转换等式设计如下式(11):
(11)
上式中
。
由于函数
严格且单调递增,因此可以给出以下反函数(12):
(12)
由上式(10)、(11)、(12)可得:
,其中,
。
接下来,可定义如下一组误差变量
(13)
上式中,
,
是虚拟控制
的期望值,
。
综合(3)、式可得:
(14)
则自适应鲁棒控制器可被设计为
(15)
在上式(15)中,
属于自适应补偿项,各个参数的估计值由式(7)给出,
属于线性反馈项,
为鲁棒项,其由之后的具体推导给出。此外,
为大于零的反馈增益。
将(15)式代入(14)式可得式(16):
(16)
上式中,
,根据式(14)所示,
需被被设计为满足如下式(17):
(17)
式中
为大于零的常数,
可以克服
和
引起的模型不确定,
可以保证
不影响后续自适应律的设计 [7] [8] 。因此,
可被设计为式(17)所示。
(18)
上式中,
,
为参数
的上下界之差。
定义如下(19)式所示的Lyapunov的函数:
(19)
则由(16)和(19)得
(20)
由上式(17)可得:
(21)
上式中,
。
于是,可得式(22)
(22)
由(22)式可知,随着时间t趋于无穷大,即
,
,则
的稳态值满足:
(23)
由(13)、(23)可知,
的稳态值满足下式(24):
(24)
以上结论易知,
和
均有界,此外,由前式(7)、(8)和(12)可以看出参数估计值和控制输入
也均有界。由(20)和(21)式可知,系统能够稳定追踪期望信号,需要选择合适的控制参数
、
、
(25)
定义如下形式的Lyapunov的函数
(26)
对其求导,则可得
:
(27)
结合(8)和(17)式子可得:
(28)
上式中,
非负,由(13)、(16)可知,其导数也是有界的,因此由Barbalat引理可知
,
,进而
,
,也即
,即所设计的控制器可使系统渐近稳定,并能最终实现上车回转位置的准确跟踪。
4. 仿真与分析
为了能直观体现本文所提预定性能自适应鲁棒控制器(PPC + ARC)的优越控制性能,本节选取PID和常规自适应鲁棒控制器(ARC)使用Matlab/simulink平台搭建仿真模型并在相同极限工况下进行仿真分析,本文在进行角度控制时,其输入是期望转速的积分,系统仿真的具体参数如表1所示。

Table 1. System simulation parameters
表1. 系统仿真参数
系统参数的波动范围如下
;
。
此外,上述各控制律参数的选择如下:
1) PID:kp = 2000 (比例增益);ki = 500 (积分增益);kd = 50 (微分增益);
2) ARC:ε = 0.015;k1 = 5;k2 = 5;h = 2;
3) PPC + ARC:ε = 0.015;k1 = 5;k2 = 5;h = 2;ρ0 = 2;ρ∞ = 0.5;k = 2;δl = 0.5;δu = 0.5。
使用Matlab/simulink平台搭建系统仿真模型和控制算法,此外,为了能够定量评价上述3种控制算法的控制器性能,本文选取上车回转角度跟踪误差绝对值的最大值Me、平均跟踪误差μe、跟踪误差的标准偏差σe等指标来进行具体的量化 [9] 。
Table 2. Tracks performance indicators
表2. 跟踪性能指标
从图2、图3以及表2中可以直观地看出,PID控制律的稳态精度明显不如另外两种算法,常规自适应鲁棒控制律的稳态误差也有较大的波动,这是因为通过预定性能控制的加入,可以使得系统稳态的回转角度跟踪精度得到很大改善。

Figure 2. Comparison of Angle tracking effects of different algorithms
图2. 各算法角度跟踪效果对比图
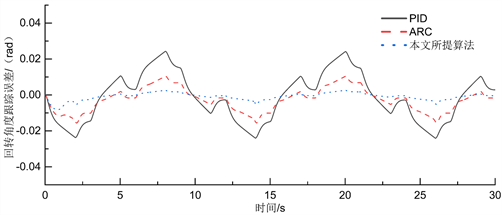
Figure 3. Comparison of Angle tracking errors of different algorithms
图3. 各算法角度跟踪误差对比图
Table 3. Speed tracking performance indicators
表3. 速度跟踪性能指标
大惯量回转系统需要满足速度稳定的需求,速度不稳定必然会导致驾驶员的操控体验不佳。从图4、图5以及表3,可以直观地看出,对比传统PID和自适应鲁棒算法,本文所提控制器对速度的跟踪精度高。
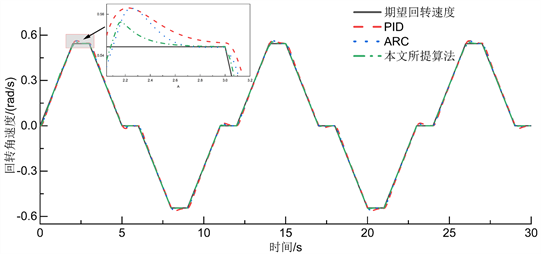
Figure 4. Comparison of angular velocity tracking effects of various algorithms
图4. 各算法角速度跟踪效果对比图

Figure 5. Comparison of angular velocity tracking errors of each algorithm
图5. 各算法角速度跟踪误差对比图
5. 结论
本文针对基于液压二次调节技术的大惯量回转系统存在的参数不确定性以及未知的外部扰动引起的跟踪精度不足的问题,提出了预定性能自适应鲁棒控制器,使用Lyapunov函数严格保证了整个闭环系统的全局稳定性。所提控制器将预定性能和自适应鲁棒控制两种控制策略有机结合,二者可发挥各自优点,使得系统对于回转系统的参数不确定和干扰,具有优秀的响应性能和控制精度,较好地满足系统转速控制和工作平稳性的要求,具有实际应用前景。