1. 研究背景
随着社会经济发展以无人机为代表的“低慢小”目标成为空中日益增长的安全威胁,而传统的设备技术难以对其实施准确有效的处理。考虑到传统有源雷达不适用于城市复杂电磁环境,加上无人机雷达散射截面积较小难以捕捉以及成本问题,无源定位技术成为对无人机定位的首选。无源定位观测设备不向外发射电磁波,仅被动接受外界无线电信号对目标进行定位,同时无源定位具有覆盖范围大、耗费低、良好的隐蔽性等优势。本文主要对基于无人机目标的无源定位跟踪技术进行了深入地研究。
无源定位是设备不向外发射电磁波,仅被动接受外界无线电信号从而对目标进行定位的技术。不同于有源定位,它不需要向目标发射电磁波来获得发射回波,具有良好的隐蔽性。因此,无源定位可以很好地补充完善现有定位系统,作为定位方法未来发展的重要方向,受到人们越来越多的重视 [1] 。
现代科学技术突飞猛进,尤其是高科技技术在军事领域就有重要作用,以雷达为核心的定位手段面临越来越严峻的挑战,单纯依靠我国军事人力手段即侦察兵来进行人为定位也十分困难,也必然会产生人员伤亡资源匮乏等问题,此时无源定位腾空如天降奇兵为我国军事现代化提供了重要帮助,无源定位手段是一种隐蔽探测,精准打击的重要手段。
2. 无源定位的问题分析
无源定位一般需要多站协同工作。由于单个侦察站在接收电磁信号时无法计量信号来自多远,它只能给出在什么时间收到什么方位进入的信号。因此,除了一些特殊的情况外,无源定位需要多站提供信息,协同定位,所以本文是针对多架无人机模拟个站点中的协同工作而采取的算法。
3. 本文创新性
在电子对抗领域,无源定位的应用十分重要。应用于无人机群的定位当中,在不对目标发射电磁信号的条件下获得目标的位置。本文采用正弦定理、图形分析法、最小二乘法、极坐标转换直角坐标和迭代法实现无人机群间的相互定位,同时进行分析,讨论出已知条件下需要最少加数的无人机能实现定位系统。在军事领域,基于本文算法的无人机群定位方法,无源定位系统的使用不易被对方感知,无源定位系统不会对被敌方定位,一般不存在被干扰的问题,可以避免在目标战场上被敌群进行强磁干扰而失去方位而损毁和坠毁。
4. 应用前景
随着科技的发展和需求的扩大,无人机的无源定位应用能够有效扩大活动范围,提高工作时间,在军事、科研、政府、商业活动及个人消费品等领域都有很大的应用空间。我国是军事强国,重视军事发展,大力提高军事战略能力,无人机群在战场上的应用能力十分突出,是我国重点关注发展的项目。其具有隐蔽性强,作战灵活的特点,配以无源定位技术,加强屏蔽信号干扰和隐蔽自身的能力,大大提高无人机群的作战能力,使其可以广泛应用于多种作战场景。
5. 问题提出
编队由10架无人机组成,形成圆形编队,其中9架无人机(编号FY01~FY09)均匀分布在某一圆周上,另1架无人机(编号FY00)位于圆心无人机基于自身感知的高度信息,均保持在同一个高度上飞行。
问题1:1) 位于圆心的无人机(FY00)和编队中另 2 架无人机发射信号,其余位置略有偏差的无人机被动接收信号。当发射信号的无人机位置无偏差且编号已知时,建立被动接收信号无人机的定位模型。
2) 某位置略有偏差的无人机接收到编号为FY00和FY01的无人机发射的信号,另接收到编队中若干编号未知的无人机发射的信号。若发射信号的无人机位置无偏差,除FY00和FY01外,还需要几架无人机发射信号,才能实现无人机的有效定位?
3) 按编队要求,1架无人机位于圆心,另9架无人机均匀分布在半径为100 m的圆周上。当初始时刻无人机的位置略有偏差时,请给出合理的无人机位置调整方案,即通过多次调整,每次选择编号为FY00的无人机和圆周上最多3架无人机遂行发射信号,其余无人机根据接收到的方向信息,调整到理想位置(每次调整的时间忽略不计),使得9架无人机最终均匀分布某个圆周上。利用表给出的数据,仅根据接收到的方向信息来调整无人机的位置,请给出具体的调整方案
问题2:实际飞行中,无人机集群也可以是其他编队队形,例如锥形编队队形(直线上相邻两架无人机的间距相等,如50 m)。仍考虑纯方位无源定位的情形,设计无人机位置调整方案。
6. 问题假设
假设1:题目中的无人机略有偏差时,还大体在理想位置,不存在偏离过大范围的无人机;
假设2:假设每架无人机标号都是固定的,且明确知道哪些无人机发射信号;
假设3:不考虑磁场等因素对于无人机发送接受信号的影响;
假设4:无人机能发射信号也可以接受信号。
7. 符号说明
——无人机接收的Y00,Y01发出的信号;
——接收信号(如本例中Y04)的无人机与FY00,FY01连线的夹角;
——另一架发出信号(如本例中Y02)的无人机与FY00,FY01连线的夹角;
——无人机接收的Y00与另一架发出信号(如本例中Y02)的无人机发出的信号;
x——接收信号的(如本例中Y02)无人机与Y00的直线距离;
y——接收信号的(如本例中Y08)无人机与Y00的直线距离;
——接收信号(如本例中Y08)的无人机与FY00,FY01连线的夹角;
——FY00接收到FY01和其余任意架无人机信号;
——无人机编号;
a1——半径。
8. 问题分析
8.1. 问题(1)的分析
问题一要求已知三架发射信号无人机编号求接收信号无人机的定位 [2] 。
首先固定两架无人机发射信号即Y00,Y01,取两个固定无位置偏差的发射信号无人机构建一个极坐标系,接收信号到Y00的直线距离与极坐标系夹角为自变量,分情况讨论,以特殊情况推普遍规律,在两个三角形中运用正弦定理求解接收信号的无人机的坐标。
8.2. 问题1(2)的分析
问题二是基于问题一的延伸与发展,问题一解决了位于圆心的无人机(FY00)和编队中另2架无人机发射信号,同时在发射信号的无人机位置无偏差且编号已知的情况下,如何确定其余位置略有偏差的被动接收信号无人机的位置的问题 [3] 。简言为已知3 (包含无人机(FY00))架机编号位置,可确定另一位置略有偏差无人机位置。问题二为已知两架无人机FY00和FY01的编号和位置,还需几架无人机编号位置,可确定另一位置略有偏差无人机编号位置?首先需得假设可发射信号的无人机亦可接收信号,题目中虽无说明但猜推测是可以,可发射信号的无人机亦可接收信号。9架无人机均匀分布在圆周上,若无偏差相邻无人机与圆心夹角均相等。由于逆时针或顺时针方位问题,将无人机分为上半周、下半周两组。由于发射信号的无人机位置无偏差,以FY00、FY01所连直线为X轴,由接收信号角度判断其方位角,进而判断所需无人机数。采用图形分析法进行讨论,最后在三角形定位下进行最小二乘法分析。讨论出还需几架无编号无人机才能进行定位。
8.3. 问题1(2)的分析
本题根据接收到的方向信息来调整无人机的位置,通过表中数据已知FY00和FY01的位置是精确的(分别为(0,0) (100,0))。
将FY00至FY09的极坐标转化为直角坐标可以得到无人机的直角坐标图(如图1)。9架无人机是均匀分布在某个圆周上,说明圆周的位置和大小不是绝对的,因此本文可以从FY02-FY09轮流选取一个无人机,
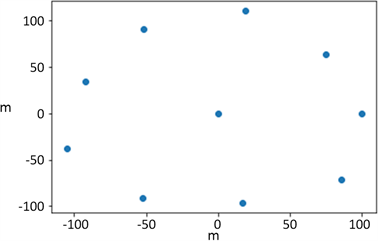
Figure 1. The actual coordinates of the UAV
图1. 无人机实际坐标图
与FY00和FY01一起,作为发射信号的三架无人机,校正其它无人机的位置,再选取第二个无人机,与FY00和FY01一起,校正其它无人机的位置,在每一次矫正后,通过代码1可以得到各个矫正无人机位置和标准无人机位置距离之和,通过这种迭代的方法可以发现每一次矫正后,其位置偏差之和在不断减小。
8.4. 问题2的分析
以FY13为坐标原点建立坐标系(如图2)。
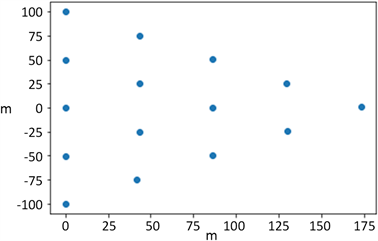
Figure 2. Tapered coordinate diagram of the standard UAV
图2. 标准无人机锥形坐标图
第1列FY11 [0, 100],FY12 [0, 50],FY13 [0,0],FY14 [0, −50],FY15 [0, −100];
第2列FY07 [
, 75],FY08 [
, 25],FY09 [
,−25],FY10 [
,−75];
第3列FY04 [
, 50],FY05 [
, 0],FY06 [
,−50];
第4列FY03 [
, 25],FY02 [
,−25];
第5列FY01 [
, 0]。
通过程序模拟,得到坐标如下。
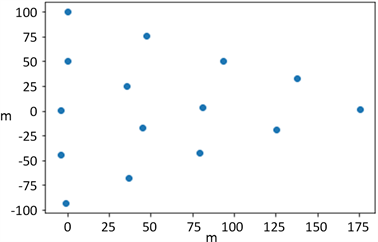
Figure 3. Coordinate diagram of offset tapered drone
图3. 偏移锥形无人机坐标图
将除了FY13和FY14外的无人机进行偏移处理,使其偏移标准位置,进行模拟仿真(如图3)。以FY13和FY14作为两个固定发射信号无人机,设定另外一架已知编号无人机发射信号,可以通过问题1(1)模型确定其余无人机坐标,再通过问题1(3)方法对于其余无人机进行多次重复校准 [4] ,来达到不断减小无人机偏移距离之和的目的。设计出无人机的调整方案。
9. 问题1(1)的模型建立与求解
9.1. 问题1(1)的模型建立
9.1.1. 极坐标下方程的建立
由于发送信号的无人机位置无偏差且编号已知,又因为每个无人机按编号顺序排列,因此可以根据编号位置关系结合三角函数关系构建模型。题目给出Y00是三架发射信号无人机中的一架,选取固定发射信号无人机Y01,对另一未知发射信号无人机位于接收信号无人机与两架发射信号无人机所构成的劣弧优弧上分情况讨论,劣弧时如下图4 Y00,Y01,Y02为已知飞机,Y04为未知。根01,04编号差就可以求出θ的大小,在圆中根据三角函数关系用α1,α2,θ表达出04 02 00所构成的角和04 01 00所构成得夹角,x是04到00的距离,将θ,x作为影响因子,根据它就可以调整无人机位置,实现定位。
劣弧时如下图Y00,Y01,Y02为已知飞机,Y08为未知。根01,04编号差就可以求出γ的大小,在圆中根据三角函数关系用α1,α2,γ表达出08 02 00所构成的角和08 01 00所构成得夹角,y是04到00的距离,将γ,y作为影响因子,根据它就可以调整无人机位置,实现定位。
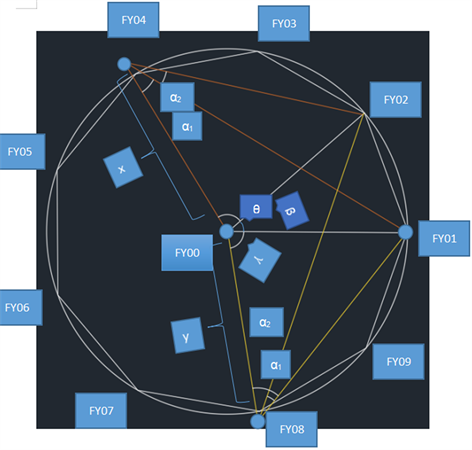
Figure 4. Schematic diagram of the four-circle circular UAV formation simulation
图4. 圆形无人机编队模拟示意图
假设圆周的半径为R以无人机FY00为极点,以FY00为端点且经过FY01的射线为极轴建立极坐标系。由于发射信号的无人机都是位置准确的,所以另一架发射信号无人机的位置是根据编号固定的,由
于理想状态下,所有无人机均匀分布在圆周上,则其对应的坐标为(R,
),其编号为Y0K,
接着,假设接受信号的无人机的极坐标位置为(x,θ),由于剩下无人机的位置略有偏差,所以两个参数都需要进行确定。接着,本文去假设它与三架发射信号的无人机的夹角。假设与FY00、FY01之间的夹角为α1,与FY00、FY0K之间的夹角为α2。接下来需要通过已知信息来确定出相应接收信号无人机的极坐标(x,θ)。
本文将略有偏差的无人机与确定的无人机位置相连,利用正弦定理,通过联立方程组来解得极坐标(x,θ)。下面由于牵扯到角度,还需要对K的不同值进行分类讨论:
(情况1) FY0K在接收信号无人机与Y00,Y01的劣弧上(如Y00,Y01,Y02发射信号(K = 2),Y04接收信号)。
在Y00,Y01,Y04所构成的三角形中由正弦定理得
在Y00,Y02,Y04所构成的三角形中由正弦定理得
解得
此时接收信号无人机的位置为
(情况2)假设接受信号的无人机的极坐标位置为(y,γ),剩下无人机的位置略有偏差,所以两个参数都需要进行确定。假设它与三架发射信号的无人机的夹角。假设与FY00、FY01之间的夹角为α1,与FY00、FY0K之间的夹角为α2。接下来需要通过已知信息来确定出相应接收信号无人机的极坐标(y,γ)。
本文将略有偏差的无人机与确定的无人机位置相连,利用正弦定理,通过联立方程组来解得极坐标(y,γ)设另一架发射信号无人机在接收信号无人机与Y00,Y01的优弧上(如Y00,Y01,Y02发射信号(K = 2),Y08接收信号)由正弦定理得
在Y00,Y01,Y08所构成的三角形中由正弦定理得
在Y00,Y02,Y08所构成的三角形中由正弦定理得
解得
此时接收信号无人机的位置为
10. 问题1(2)的模型建立与求解
在问题一的基础上,在包含无人机FY00,以及2个已知位置和编号的无人机时,即可定位任意一个已知编号的接收无人机的位置。那么问题二就可以转化成,已知无人机FY00和FY01的编号和位置,要多少个未知编号发射无人机,才能知道未知发射无人机的编号 [2] 。
可知圆周上相邻无人机的圆心角为40˚,假设可以发送信号无人机亦可接收信号,FY00接收到FY01和其余任意架无人机信号为
,其编号为
。无人机只能接受角度信息,
。见下图,在FY00的极坐标系中,FY0A = M (r,a1),其中夹角FY00-FY0A与FY00-FY01的夹角。
设半径为a1,由于发射无人机定位无偏差,所以a1 = r已知。
当
时,由于a1是40˚的倍数,所以A = n/40+1,即可得知FYOA的编号。而当
时,由于FYOA可能在FY01的顺时针或者逆时针方向上,无法区分。此时引入一个新的发射无人机FYOB增加定位条件。
见下图5,设FY00-FY0A-FY01的内角分别是a1、a2、a3,FY00-FY0B-FY01的内角分别是b1、b2、b3,由于全部是发射无人机,可发射和接收信号,所以全部内角已知,且r己知。
见下图5,设FY00-FY0A-FY0B的内角分别是c1、c2、c3,其中
,且全部是发射无人机,所以全部内角已知,且r已知。

Figure 5. A schematic diagram of the UAV simulation
图5. 无人机模拟示意图
所以有所选两架无人机同侧、异侧和对称的情况。列出以上情况的a1、b1、c1关系即可,定位出其他无人机的位置。
本文可以利用基于角度的测量方法三角测量定位法求出无人机的定位。三角定位原理主要根据一个测量目标点以及两个已知坐标的参考点可形成一个三角形,借助三角形中参考边的长度,测量两参考点与目标点形成的角度,即可找到目标点的距离及坐标。将多种情况带入做小二乘法进行分析。
将X、Y用R和
代替,用上述第n个方程减去n − 1个方程,
带入多个情况下的位置信息,可以验证出n=2。
综上,2还需要2架无人机发射信号,才能实现无人机的有效定位。
11. 问题1(3)的模型建立与求解
11.1. 问题1(3)模型的建立
D为调整前各无人机与准确位置的距离之和Di分别为FY01-FY09当前位置和准确位置两点间距离,可以通过代码一得到。
11.2. 问题1(3)模型的求解
通过问题1(1)模型可以求出每一次调整后FY00至FY09的极坐标。
第1次调整:
调整前D = 52.0826
使用0,1,2,调整后D = 24.1281
使用0,1,3,调整后D = 40.4936
使用0,1,4,调整后D = 12.1310
使用0,1,5,调整后D = 9.4485
使用0,1,6,调整后D = 8.6595
使用0,1,7,调整后D = 9.0299
使用0,1,8,调整后D = 13.4595
使用0,1,9,调整后D = 41.2624
第2次调整:
调整前D = 41.2624
使用0,1,2,调整后D = 90.7717
使用0,1,3,调整后D = 14.1208
使用0,1,4,调整后D = 3.5716
使用0,1,5,调整后D = 4.2012
使用0,1,6,调整后D = 4.1706
使用0,1,7,调整后D = 4.7210
使用0,1,8,调整后D = 5.3880
使用0,1,9,调整后D = 20.8081
第3次调整:
调整前D = 20.8081
使用0,1,2,调整后D = 53.1398
使用0,1,3,调整后D = 6.8673
使用0,1,4,调整后D = 3.3737
使用0,1,5,调整后D = 3.4652
使用0,1,6,调整后D = 4.0655
使用0,1,7,调整后D = 3.0855
使用0,1,8,调整后D = 4.2611
使用0,1,9,调整后D = 3.6019
调整后无人机极坐标
FY00 [0.0, 0.0], FY01 [100.0, 0.0]
FY02 [99.7866, 40.3430], FY03 [99.8680, 80.1144]
FY04 [99.7154, 120.1626], FY05 [98.9393, 160.0333]
FY06 [99.1846, 199.9090], FY07 [99.8990, 240.0401]
FY08 [100.0027, 280.0230], FY09 [99.9554, 320.1525]
可以发现,在经过3次以FY00,FY01为基准的调整后,各无人机与准确位置的距离之和可以减小到3.6,很接近各个无人机的理想位置。
对于模拟定位的精密度进行定量分析,认为精度达到2M CEP的模型为一个优质模型。
问题一(3)中。
调整调整后FY05 [98.9393, 160.0333]距离标准位置最远,D5 = 1.1117434461241,即最大精度可达1.2M 2D RMS,显然满足2M CEP的标准,是一个优质模型。
12. 问题2的模型建立和求解
1、根据FY13和FY14,先校准第一列的x轴坐标,通过调整这一列其他无人机的位置,使α = 0。让第一列对齐。
2、以第一列的FY12、FY13和FY14作为发射信号无人机,第三列无人机分别接收信号,调整其位置校准第三列。校准前后的D分别为71.1015和51.3690。
3、以第三列的FY04、FY05和FY06作为发射信号无人机,第一列无人机分别接收信号,调整其位置校准第一列。
校准前后的D分别为51.3690和33.5414。
4、再次调整第一列使其与FY13对齐。
5、最后以FY12、FY13和FY14作为发射信号无人机,其余无人机分别接收信号,调整剩下所有无人机位置进行最后的校准。
校准前后的D分别为33.5414和4.7805。通过5次调整使无人机形成了间距为50 m的较为标准的锥形无人机编队 [3] ,如图6~图10所演示模型。
问题二
经过5次调整后D = 4.7805,最多只有2只无人机偏离2米以上,偏离2米以上的无人机数量不可能超过5只,其精度显然高于2M CEP的标准。是一个优质模型。

Figure 6. The first adjustment coordinate diagram
图6. 第一次调整坐标图

Figure 7. The second adjustment coordinate diagram
图7. 第二次调整坐标图

Figure 8. The third adjustment coordinate chart
图8. 第三次调整坐标图
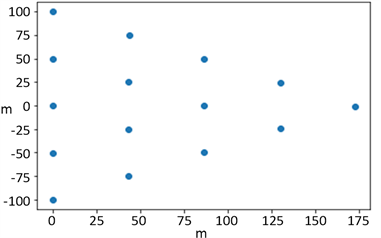
Figure 9. The fourth adjustment coordinate chart
图9. 第四次调整坐标图
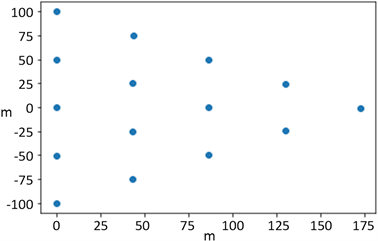
Figure 10. The fifth adjustment coordinate diagram
图10. 第五次调整坐标图
2M指在半径2米的圆中,CEP是在此圆中的无人机有50%,RMS是在此精度的概率为66.7%,2D RMS是在此精度的概率为95%。
13. 模型的评价
模型的评价与推广随着社会经济发展以无人机为代表的“低慢小”目标成为空中日益增长的安全威胁,而现有常规武器装备通常无法对其实施有效的处置拦截。考虑到传统有源雷达不适用于城市复杂电磁环境,加上无人机雷达散射截面积较小难以捕捉以及成本问题,采用无源定位技术,观测设备不向外发射电磁波,仅被动接受外界无线电信号对目标进行定位,同时无源定位具有覆盖范围大、耗费低、良好的隐蔽性等优势。本文主要利用无源定位技术对无人机目标进行定位跟踪研究。无源定位技术广泛应用于军防、地形测绘、交通检测等多个领域。本文并没有考虑受时间、压强,大气限制等问题,理想化考虑,仅涉及利用到达距离和到达方向对无人机的无源定位技术研究。本文认为可结合多种元素作为下一深入研究领域。
在第一小问的求解中在理想状态下即发射信号无人机无位置偏移,利用在极坐标系中利用三角函数中正弦定理求解相对于三点确定一个圆取三圆交点数学分析上思维模式更清晰,实际操作计算更为简洁
对于问题1(3)和问题2,本文使用了(1)中模型并将程序和模型结合,方便进行多次反复调整和迭代,通过设定函数值D清晰的观察出调整前后无人机和标准位置的差距。但是在选择发射信号无人机时,并未考虑其所处位置,矫正先后顺序对于最后调整结果的影响。
基金项目
2022年大创项目,项目编号:X202210143037。