1. 引言
随着我国卫星遥感技术日益成熟,国产卫星遥感影像在测绘、资源环境、城市规划等领域应用需求逐渐增大 [1] ,所需生产处理的卫星影像种类与数量显著增加,而几何校正是卫星影像必不可少的处理流程,传统做法是基于整幅参考影像,人工选取影像控制点,借助成熟遥感软件完成 [2] ,此方法复杂繁琐,效率低下,因此越来越多的学者进行了提高影像校正自动化相关研究。
控制点影像 [3] 概念的提出,为卫星影像几何校正提供了新方法,出现了许多基于控制点影像库的卫星影像校正方法。文献 [4] 通过影像采集和野外实测两种方式获取大量控制点影像数据,基于SQL Server数据库,开发了福建省海岛海岸带控制点影像数据库系统,验证了构建控制点影像库的可行性,实现了对几何校正所需大量控制点数据的科学管理,以及控制点数据的可重复利用。文献 [5] 通过人工选取控制点影像数据并设置控制点影像库的表结构,建立了控制点影像库,利用SURF匹配算法、RANSAC算法获取匹配控制点,从而验证了基于控制点影像库的卫星影像校正的可行性,并且有效地提高了影像校正的精度和效率。但是目前研究所构建的控制点影像数据库只包含点状控制地物,特征比较单一,对影像校正畸变约束能力不强。现有卫星影像数据地物光谱信息具有一定不确定性,点状地物与周围环境光谱信息容易变化不明显,不利于被识别和提取 [6] ,需要引入包含高级特征控制信息的控制点影像数据,例如线特征控制要素和面特征控制要素。
本文提出含有更高级特征控制信息的“广义控制点影像”概念,研究广义控制点影像采集与编码方法;基于三层C/S模式,研究广义控制点影像库构建方法;基于网格采样思想和最远点采样法,研究广义控制点影像空间检索方法,确保校正所需广义控制点影像空间质量,为待校正影像提供相适应可靠的高级控制信息;并基于广义控制点影像库实现多源卫星影像几何校正。
2. 广义控制点影像库构建
广义控制点影像库是对大量广义控制点影像数据进行统一存储、管理、可视化等操作的应用系统,提高广义控制点影像数据重复利用率,同时包括广义控制点影像检索,为后续卫星影像几何校正提供可靠控制信息。本章给出广义控制点影像库具体构建方法。
2.1. 广义控制点影像采集与编码
2.1.1. 广义控制点影像采集
广义控制点影像是指在严格几何精校正后的高分辨航天或航空影像上采集得到大小适中的矩形影像图元,具体可分为控制点影像、控制线影像、控制面影像。控制点平面坐标采用CGCS2000坐标系,高程采用1985国家高程基准。
控制点影像包含易于分辨的固定点状特征,可适用于含有丰富明显点状地物的卫星影像几何校正,主要针对固定点状特征地物,如城市道路交叉点、主干道交通标线交叉点、铁路交叉点、标志性建筑等,在数据源影像上利用SURF点特征提取算法 [7] ,结合人工判读实现控制点影像半自动化采集,分辨率为0.5 m,大小为256像素*256像素,如图1(a)所示。
控制线影像主要是由固定线状地物两个端点处的控制点影像数据组成的长度、坡度适中的直线矢量影像对,可适用于具有丰富线几何特征地物的卫星影像几何校正,控制点影像对组成的固定矢量直线长度以500 m为主,长度控制在100 m到1000 m,采集方法为选取城市固定道路上的两个交叉路口,且道路坡度要求小于5%,分别截取256像素*256像素影像块,组成为控制线影像,分辨率为0.5 m,同时截取包含整体道路且大小适当的矩形影像作为示意图,如图1(b)所示。
控制面影像则包含大小适中明显固定的规则几何多边形地物,可适用于存在大量面状固定地物的卫星影像几何校正。主要针对固定面状几何地物,如城市建筑物、耕地地块等,在数据源影像上以面状地物几何中心坐标为中心,以面状地物几何多边形外接矩阵边长两倍大小,利用Canny边缘检测算子 [8] ,结合人工判读实现控制面影像半自动化采集,分辨率为0.8 m,如图1(c)所示。
 (a) 控制点影像
(a) 控制点影像  (b) 控制线影像
(b) 控制线影像 (c) 控制面影像
(c) 控制面影像
Figure 1. Example of generalized GCP chips
图1. 广义控制点影像示例
2.1.2. 广义控制点影像编码
为方便广义控制点影像数据的组织存储、管理、检索等操作,以及保障广义控制点影像数据完整性,本文设计了广义控制点影像数据编码方法。广义控制点影像数据统一采用八位数编码。第1位为类型码,表示广义控制点影像特征类型,其中“P”代表控制点影像数据,“L”代表控制线影像数据,“A”代表控制面影像数据;第2~3位为尺度码,表示广义控制点影像空间分辨率,尺度码第一位为空间分辨率米位数值,第二位表示空间分辨率分米位数值;第4~8位为序列码,表示广义控制点影像数据采集序号;例如“L0500234”表示0.5米空间分辨率第234个控制线影像。广义控制点影像编码见图2。
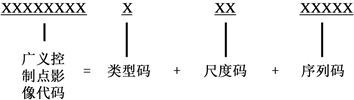
Figure 2. Code of generalized GCP chips
图2. 广义控制点影像编码
2.2. 广义控制点影像库架构
广义控制点影像库系统架构采用三层结构C/S模式 [9] 。底层为数据库及数据访问层,其中封装了访问数据库函数,实现对广义控制点影像数据定义、储存、访问和管理,并响应上一层数据请求;中间层为业务逻辑层,接收、处理用户请求,并按要求与底层数据库交互以及反馈信息给上一层,其中封装所需业务逻辑,包括数据入库组件(用于广义控制点影像属性数据和图像数据入库),数据库操作管理组件(用于对数据进行增、删、改、查),ArcGIS Engine组件(用于遥感影像和控制点影像数据可视化显示,如放大、缩小、漫游、选择等操作);最外层为表示层,包括控制点影像库系统各种功能模块,仅实现用户界面展示以及与中间业务逻辑层的紧密联系。影像库系统架构见图3。
2.3. 影像库内容与实现方法
2.3.1. 影像库内容
广义控制点影像库内容主要是广义控制点影像的属性数据和图像数据。对于控制点影像,属性数据主要包括控制点影像编码、控制点影像中心坐标、影像分辨率、存储路径、尺寸、控制点入库日期 [10] ;对于控制线影像,属性数据主要包括控制线影像编号、直线段左端点坐标、直线段右端点坐标、直线段中点坐标、直线段长度、直线段坡度数据;对于控制面影像,属性数据主要包括面状地物几何中心坐标、控制面影像左上端点坐标,控制面影像右下端点坐标,控制面影像区域面积数据。广义控制点影像图像数据统一采用TIF格式,方便统一存储管理。
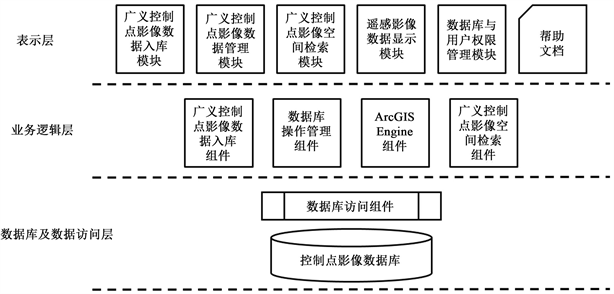
Figure 3. System architecture of generalized GCP chip database
图3. 广义控制点影像库系统架构
2.3.2. 影像库实现方法
广义控制点影像库数据库平台选用SQL Server 2008数据库,广义控制点影像数据库表可以分为广义控制点影像数据表和数据库系统表两大类。其中广义控制点影像数据表为与广义控制点影像自身直接相关的数据库表,主要用于存储广义控制点影像属性数据和图像数据;其中数据库系统表与广义控制点影像间接相关,主要用于方便控制点影像数据库后期运行维护和更新,如城市行政区划表等。控制点影像数据库表设计见图4。广义控制点影像数据表和数据库系统表之间主要通过构建主键与外键建立关联。
广义控制点影像库选用Visual Studio 2012为开发工具,利用ArcGIS Engine10.2控件创建数据库系统地理信息功能,实现遥感影像数据查看。访问数据库组件采用ADO (ActiveX Data Objects)技术,采用ADO.NET对象实现数据库访问与管理操作。广义控制点影像属性数据可采用TXT文本文件或Excel表格进行单个或者批量数据入库,广义控制点影像图形数据采用二进制格式,以流(Stream)的方式存储在SQL Server数据库Blob字段中。
2.4. 广义控制点影像检索
广义控制点影像检索,是利用广义控制点影像库实现卫星影像几何校正重要环节,是提供可靠控制信息关键,可分成初步查询和后期筛选两步,总体流程见图5。

Figure 5. Retrieval process of generalized GCP chips
图5. 广义控制点影像检索流程
初步查询是结合待校正影像所含地物光谱信息特点差异,根据本文2.1节广义控制点影像概念,选择查询相适应初始的广义控制点影像数据,具体过程是通过待校正影像元数据文件,获取影像角点投影坐标 [11] ,查询控制点影像中心投影坐标,或控制线影像直线段中点投影坐标,或控制面影像面状地物几何中心投影坐标满足此条件范围内的广义控制点影像数据,作为初步查询结果。
控制点分布情况会直接影响几何校正质量,均匀分布的控制点可有效保障校正精度,获得更好校正效果。本文在广义控制点影像初步查询结果上,进行后期筛选,算法原理(见图5)如下:
1) 由待校正影像四个角点投影坐标
可得最小值坐标
,以
和影像左下角点坐标
为原点,分别建立影像局部坐标系
和
,坐标系
的
轴与正北方向重合,坐标系
的
轴与待校正影像左边界线重合,见图6。控制点投影坐标和以上两种影像局部坐标系之间转换见式(1)。

Figure 6. Local coordinate system of image
图6. 影像局部坐标系
(1)
式中:
为控制点投影坐标;
与
分别为该点在影像局部坐标系
和
下坐标;
为由待校正影像角点投影坐标所得最小值坐标;
与
分别为待校正影像左上和左下角点投影坐标。
2) 在影像局部坐标系
中取长l宽d的矩形区域近似代替待校正影像地理范围,矩形左下两条边分别与坐标轴
和
重合,如图7中大矩形所示,l与d计算见式(2)。
(2)
式中:
;
;
;
,
为待校正影像角点投影坐标。
3) 对于控制线影像和控制面影像,判断控制线影像直线段左端点投影坐标和直线段右端点投影坐标,以及控制面影像左上端点投影坐标和控制面影像右下端点投影坐标是否满足步骤3中校正影像近似矩形区域内,剔除不满足的广义控制点影像。
4) 将所需广义控制点影像数量N进行拆分。当
时,其中
和
为等式成立下最大相等或相邻两个整数,将矩形区域进行等间距网格划分,形成N个网格点,如图7(a)中交叉点所示。按照控制点影像中心投影坐标,或控制线影像直线段中点投影坐标,或控制面影像面状地物几何中心投影坐标,矩形区域内查找与网格点最邻近的广义控制点影像即可,若筛选数量不足,需补充广义控制点影像。
5) 当
时,其中n为正整数,
和
为等式成立下最大相等或相邻整数,为确保广义控制点影像在待校正影像边缘区域能够均匀分布,将待校正影像矩形区域划分为区域①和②,其中区
域②为矩形区域,其边界与待校正影像矩形上下边界和左右边界分别相距
和
,见图7(b)。
在区域①中将矩形边界等间距划分
个网格点,如图7(b)中交叉点所示,与步骤5类似,查找与矩形边界网格点最邻近的广义控制点影像,在区域②中,利用最远点采样算法 [12] ,提取剩余
个广义控制点影像即可。
3. 影像几何校正应用方法
利用本文2.4节广义控制点影像检索方法,结合待校正影像自身类型特点,检索待校正影像范围内所需数量相适应的广义控制点影像数据,采用人工判读方法实现广义控制点影像与待校正影像匹配。对于控制点影像,匹配获取同名控制点,采用有理函数几何校正模型进行校正 [13] ;对于控制线影像,通过匹配获取道路直线两端点坐标,进而得到控制线矢量,采用基于线模式的变换纠正模型 [14] 进行校正;对于控制面影像,获取待校正影像与控制面影像的匹配几何多边形,采用基于面特征的遥感图像几何校正模型 [15] 进行校正。
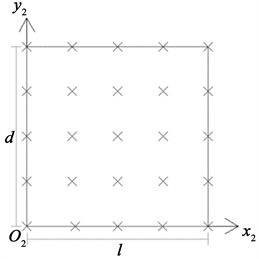 (a) 网格采样方式
(a) 网格采样方式 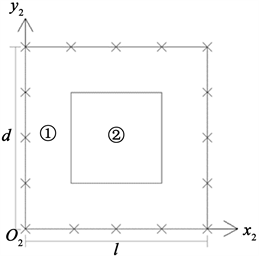 (b) 网格采样与最远点采样结合方式
(b) 网格采样与最远点采样结合方式
Figure 7. Screening mode of generalized GCP chips
图7. 广义控制点影像筛选方式
4. 实验与分析
4.1. 实验数据
本文广义控制点影像库构建与应用实验区域为我国东部某城市,面积约为6000 km2,地势相对平缓。广义控制点影像数据源为2020年获取的航空正射影像,高程数据为90米分辨率的SRTMDEM。本文在该城市范围内选取2 m分辨率3 km*3 km大小点状类型地物丰富的高分一号卫星全色影像用于控制点影像的几何校正,选取2 m分辨率5 km*5 km大小线状类型地物丰富的吉林一号卫星多光谱影像用于控制线影像几何校正,选取2 m分辨率3 km*3 km大小面状类型地物丰富的资源三号全色卫星影像用于控制面影像几何校正。三景影像附带元数据文件,实验数据具有良好代表性。
4.2. 广义控制点影像检索分析
采用本文2.4节中广义控制点影像检索方法,将广义控制点影像数量设定为9、12、15、18共4种,依次对三景待校正影像进行实验,三景影像的广义控制点影像检索结果编码分别见表1~3,三景影像广义控制点影像初步查询结果空间分布情况见图8,控制点影像检索结果空间分布情况如图9(a)所示,控制线影像检索结果空间分布情况见图9(b),控制面影像检索结果空间分布情况见图9(c)。
利用最邻近指数 [16] (nearest neighbor index, NNI),根据控制点影像中心投影坐标、控制线影像直线段中点投影坐标和控制面影像面状地物几何中心投影坐标,对广义控制点影像的检索结果空间分布进行定量化评价。NNI值小于1,广义控制点影像为聚集分布;NNI值等于1,广义控制点影像为随机分布;NNI值大于1,广义控制点影像为均匀分布。NNI值统计结果见表4。

Table 2. Code of linear control chips
表2. 控制线影像编码
Table 3. Code of areal control chips
表3. 控制面影像编码
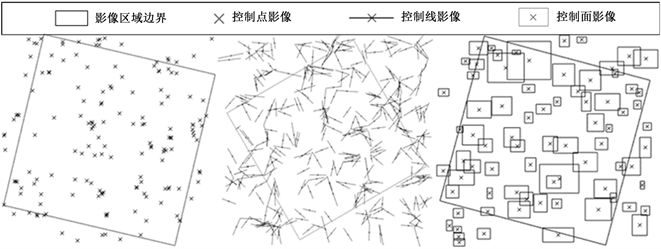
Figure 8. Preliminary inquiry result of generalized GCP chips
图8. 广义控制点影像初步查询结果
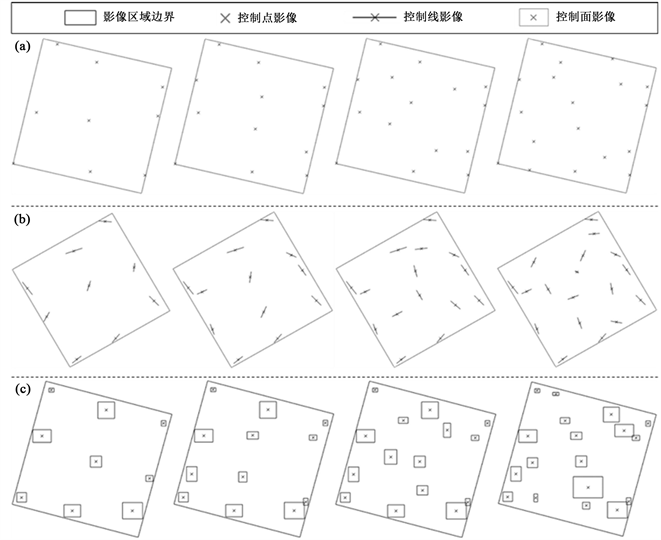
Figure 9. Retrieving result of generalized GCP chips
图9. 广义控制点影像检索结果
从图8可看出,对于高分一号影像,初步查询结果共176个控制点影像,其中133个满足影像范围内;对于吉林一号影像,初步查询结果共290个控制线影像,其中162个满足影像范围内;对于资源三号影像,初步查询结果共76个控制面影像,其中47个满足影像范围内。从图9可看出,对于三景待校正影像,本文提出的广义控制点影像空间检索方法能够准确检索出待校正影像范围内所设定数量的广义控制点影像数据,有效剔除了冗余数据,减少不必要工作量,且检索结果在影像边缘区域也有较好覆盖。
由表4可知,对于三景待校正影像,广义控制点影像检索结果NNI值均大于1,表明所有广义控制点影像检索结果均为均匀分布,本文提出的广义控制点影像空间检索方法能为影像校正提供相应可靠的控制信息。
4.3. 几何校正应用分析
根据本文4.2节广义控制点影像检索实验结果,采用本文第3章影像校正方法,对三景实验影像分别利用控制点影像、控制线影像、控制面影像进行校正应用分析。实验中,利用航空正射影像获取几何校正的检查点,采用总体点位均方根误差RMSE作为精度评价指标,实验结果见表5。
Table 5. RMSE statistics of geometric correction result
表5. 几何校正结果RMSE值统计
从表5可看出,对于三景待校正实验影像,本文提出的广义控制点影像库在几何校正应用方面,精度总体可达1像素以内。随着广义控制点影像数量增加,校正精度略有改善,且略微波动,总体无太大变化。对于高分一号影像,最高校正精度为1.530 m,平均校正精度为1.591 m;对于吉林一号影像,最高校正精度为1.898 m,平均校正精度为1.908 m;对于资源三号影像,最高校正精度为1.679 m,平均校正精度为1.740 m,总体精度可满足影像后期生产应用需求。
5. 结束语
针对传统控制点影像数据库控制点特征单一、控制点不易分辨与定位的缺陷,本文提出广义控制点影像概念,以及广义控制点影像库构建方法,包括广义控制点影像检索方法,以某城市为例,利用三种类型卫星影像验证了本文方法可行性。结果表明本文提出的广义控制点影像库构建方法可实现特征更高级的控制信息存储管理与检索,并且在卫星影像几何校正应用方面,能够为多源待校正卫星影像提供相适应可靠的特征更高级控制信息,有效解决了传统控制点影像库控制点特征较为单一的问题,且校正精度能够满足一般影像的生产应用需求,本文方法对控制点影像库构建及其影像校正应用方面研究具有一定指导和借鉴作用。
基金项目
上海市测绘院科研项目(Z20-6003-Z1)。