1. 引言
脊柱脊髓疾病是骨科的常见病、多发病,而外科手术是治疗这些疾病的有效方法。椎弓根螺钉为代表的脊柱内固定技术是脊柱外科手术的基本技术之一,在脊柱畸形矫正、感染、肿瘤及颈胸腰椎退变融合手术中被广泛应用。椎弓根置钉技术是脊柱外科手术历史上的革命性技术,通过脊柱三柱固定,具有畸形矫正能力强、融合节段短、固定更加牢固可靠等优点 [1] [2] 。但由于脊柱周围毗邻结构复杂,椎弓根周围有重要的神经和血管等,脊柱外科手术风险较大,尤其是复杂的脊柱畸形,局部解剖结构变异大,导致术中定位置钉困难,置钉过程中的任何偏差都有可能损害重要血管神经,导致不可逆转的后果 [3] [4] 。
在传统置钉方法中,Xu等 [5] 报道69例腰椎手术徒手与导航椎弓根螺钉置入的准确率分别为63.8% (徒手)和97.8% (O臂导航)。同时国内外学者逐渐开始在脊柱外科手术中使用机器人,最常见的是在胸腰椎融合手术中使用机器人辅助椎弓根置钉 [6] 。机器人引导下椎弓根置钉具有更高的置钉精确度以及减少辐射暴露 [7] 。此外,机器人还可在具有解剖变异(如椎弓根萎缩或复杂脊柱畸形)的情况下提高手术效果。田野等 [8] 研究发现脊柱机器人和传统透视辅助下治疗单节段无神经症状胸腰椎骨折均可获得满意的临床效果,但前者置钉准确性更高,术中透视次数更少,置钉时间更短,对术者技术要求较低,具有广泛的应用潜力。吴瑞 [9] 等探讨了Renaissance机器人导航系统在微创手术中应用的安全性和准确性,相比于徒手置钉可以显著提高准确性和安全性。王洪伟等 [10] 探讨了术前计划在脊柱微创手术机器人椎弓根螺钉钻孔中的应用价值,总结应用经验,优化了系统的结构设计。程芳令 [11] 等分析天玑骨科机器人导航系统对脊柱患者的治疗效果,发现患者术后恢复进程明显加快。李卓夫 [12] 等开发了一种3D打印配准模板的脊柱机器人系统,并进行了椎板切除操作,其精度满足临床要求,但是存在占用空间大的问题。Shoham M [13] 等开发了一种小型脊柱手术机器人系统,在椎弓根置钉及固定过程中进行方向的引导,以提高其手术的精确性,但是此系统的手术成本过高。林云志 [14] 等开发了Orthobot脊柱外科专用手术机器人系统,并通过猪腰椎植入椎弓根螺钉验证了此系统可以提高置钉准确率,但是存在机构系统不灵活,操作空间小的问题。Jin H [15] 等研制了RSSS机械臂系统,具有6个自由度,可以完成脊柱运动过程的模拟,并对其安全性能进行分析,但是其机械臂整体结构较大且较为复杂。张鹤等 [16] 搭建了一个遥控型脊柱微创手术机器人系统并进行相应的钻孔实验,避免打孔过程中X射线对医师的损伤,提高了打孔的准确性。
综合上述文献,可以看出传统的置钉过程存在以下几方面的问题:徒手置钉过程中医生和病人由于拍片不可避免受到辐射影响;医生主要依赖偏向力导致的“手感”调整器械进给姿态信息,存在经验依赖性和不安全性,无法保证置钉效率。现有的置钉手术系统虽然具有自身的优点,但同时存在不足之处:手术成本过高、操作空间小、手术操作方向固定等。因此为了解决传统置钉手术过程和置钉系统存在的问题,本文根据实际置钉手术的需求设计了一种椎弓根辅助置钉装置,通过建立运动学模型验证其正确性,同时进利用蒙特卡罗法求得机构的工作空间并进行奇异形位的分析,最后通过建立其运动精度可靠性概率优化模型并利用多种群遗传算法进行杆长优化,结果表明所设计的置钉装置满足置钉手术的需求,为后续的椎弓根置钉手术提供一种方案。
2. 椎弓根辅助置钉装置总体方案设计
由于脊柱手术过程中工作空间有限,且要求的精度比较高,因此需要对脊柱手术过程进行分析并确定相应的达到脊柱手术的主要指标的要求,对比以往方案,设计一种辅助置钉装置,该装置包括双平行四边形机构,能够从机构上保证开路器在手术中只进行绕切口的远心运动,还包括末端螺旋微动机构,可以使机构的远心点平稳地到达手术位置。
2.1. 椎弓根置钉手术过程分析
传统椎弓根置钉手术中,术者根据术前的CT医学影像,分析椎弓根及椎体的相应形态,确定椎弓根的置钉点及置钉角度,尽量使钉道位于椎弓根中心,完成术前规划内容,如图1所示,其中X,Y,Z,X′,Y′,Z′为基坐标的各个方向,θ为置钉轴线与Z坐标轴方向的夹角。术中,医生操作开路器钻取钉道,将开路器尖端置于置钉点位置,通过术中CT图像及术者“手感”进行相应的操作修正。在手术过程中器械姿态信息及手术过程力信息对手术医生的置钉准确率尤其重要,如何保证术中信息及时有效的反馈是提高手术精准性的重要环节。

Figure 1. Surgical view of pedicle screw placement
图1. 椎弓根置钉手术图
通过对传统脊柱微创手术流程的分析,提取对置钉装置系统的整体结构方案的要求:
1) 置钉点作为钉道入口,在术中位置尽量保持固定。置钉装置以切口为远心点的远心运动,即置钉过程中在切口位置处只能有四个自由度:两个绕切口的摆动自由度(俯仰、偏摆),一个用于伸缩的移动自由度和一个用于自转的转动自由度。
2) 置钉装置应具有灵活的运动机构,同时包含竖直和水平方向上的自由度,可针对不同的手术区域,精准地将开路器尖端置于远心点位置。
3) 置钉装置应具有移动平台,可根据实际需要在手术室中自由移动。
2.2. 置钉装置结构设计
根据置钉装置的整体方案要求,设计了置钉装置结构如图2所示,共具有六个自由度,分为移动平台、双平行四边形机构、差动螺旋机构。置钉装置底部为移动平台,通过安装地脚轮以实现置钉装置的自由移动,并通过一组伺服电机连接滚珠丝杠确保置钉装置可以在竖直方向上移动;一组长摇杆和短摇杆与长柄和短柄相连共同组成了双平行四边形机构,由于双平行四边形机构在转动过程中任意移动方向时始终保持延长线交于一点且位置不变,满足了置钉手术过程中置钉点位置的固定;差动螺旋机构采用电机驱动丝杠以此带动差动螺旋杆前进,差动螺旋机构可以保证钉道的低速钻入,同时末端开路器上贴有微型应变片,通过三维力传感器测量实时力大小和方向并进行相应置钉位置的调整,实现精确置钉。
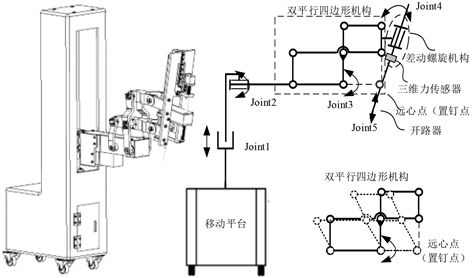
Figure 2. Structure diagram of pedicle auxiliary nailing device
图2. 椎弓根辅助置钉装置结构图
3. 椎弓根置钉装置运动学建模及仿真验证
完成置钉装置的结构模型建立之后,需要对设计的置钉装置进行验证,利用D-H法建立设计的置钉装置运动学模型,其运动学模型如图3所示,其中θ2、θ3、θ4、θ5表示置钉装置各个关节转角的转动范围,d1、d3、d6表示各个关节的距离,x,y,z为相应的基坐标方向。
利用D-H法进行建模,置钉装置的D-H参数如表1所示,其中
为杆件扭角,
为杆件长度,
为关节距离,
为关节扭角。
3.1. 运动学正解及模型验证
用D-H法建立其运动学坐标系之后,其运动学参数表也相应得出,根据置钉装置的运动学坐标系和连杆参数,可分别求出相邻两个坐标系间的齐次变换矩阵,从而建立其正运动学模型,根据表1中的D-H参数,可以得到变换矩阵:

Figure 3. Kinematic coordinate system of nail setting device
图3. 置钉装置运动学坐标系

Table 1. D-H motion parameter model
表1. D-H运动参数模型
(1)
(2)
(3)
(4)
(5)
(6)
根据各关节D-H变换矩阵,可以得到置钉装置执行器末端到基座标系的变换矩阵为:
(7)
通过matlab中的simmechanics模块建立置钉装置的机构模型,并以此机构模型输出作为实际结果,以建立的运动学模型作为理论结果,搭建的simulink程序如图4所示。给定两种模型相同的关节角度输入,对比两种模型的结果,如图5和图6所示,末端位置和姿态误差量级较小,结果表明所建立的运动学正解模型是正确的。

Figure 4. The forward kinematics solution of nail setting device simulink program
图4. 置钉装置运动学正解simulink程序
3.2. 运动学逆解及模型验证
在所求得的运动学模型正解的基础上,通过逆解求解得到对应的关节转角如式(8)所示。
(8)
式中,px,py,pz为相应坐标轴的位置量。
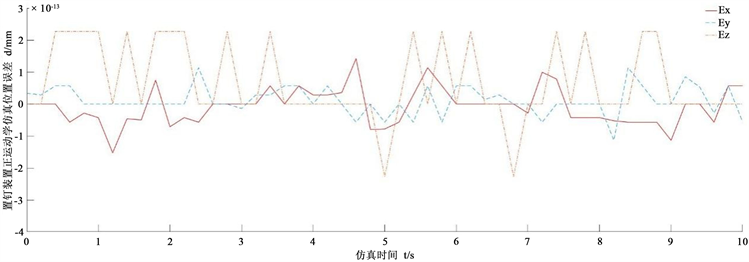
Figure 5. Kinematic forward solution position error of nail setting device
图5. 置钉装置运动学正解位置误差
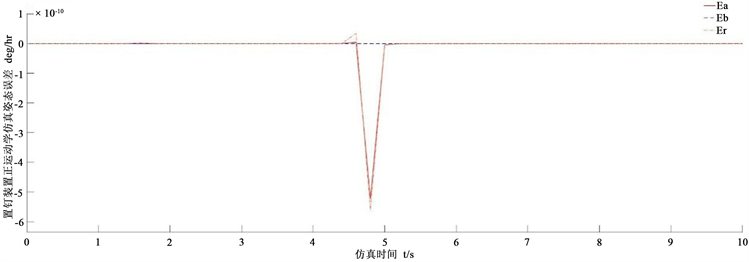
Figure 6. Kinematic forward solution attitude error of nail setting device
图6. 置钉装置运动学正解姿态误差
通过给定置钉装置的机构模型关节转角,并以此机构模型输出的末端位姿矩阵作为逆解理论模型的输入,如图7所示,对比逆解模型和输入关节角度的结果,如图8所示,关节转角误差极小,结果表明所建立的运动学逆解模型是正确的。
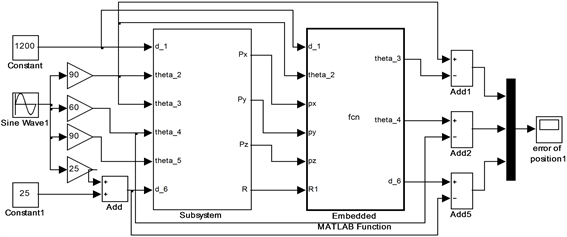
Figure 7. Inverse kinematic solution of nail setting device verifies simulink program
图7. 置钉装置运动学逆解验证simulink程序
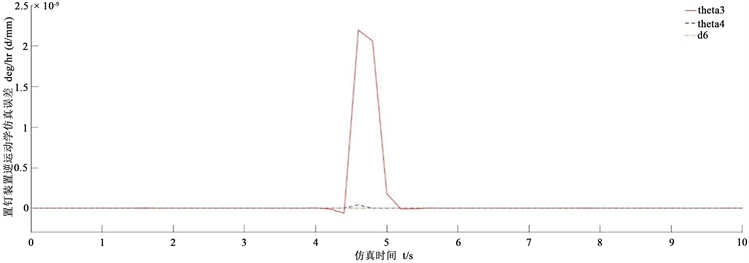
Figure 8. Verification results of inverse kinematic solution of nail setting device
图8. 置钉装置运动学逆解验证结果
4. 椎弓根置钉装置运动学建模及仿真验证
4.1. 置钉装置工作空间分析
置钉装置工作空间是指置钉装置在运转过程中,末端点所能达到的空间点的集合,是反映置钉装置性能的重要指标。利用Matlab中的运动矩阵绘制置钉装置工作空间点云图,如图9所示,双平行四边形的不动点位于底部圆的圆心,置钉装置经过开路器绕不动点形成一个类似圆锥体的工作空间,满足置钉操作的要求。
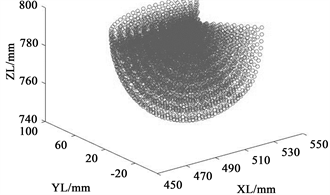
Figure 9. Point cloud view of the end work space of the auxiliary nail-setting device
图9. 辅助置钉装置末端工作空间点云图
4.2. 置钉装置奇异形位分析
置钉装置的奇异性是机构的固有性质,置钉装置在主动件的驱动下运动,在运动过程中如果机构的运动学性能瞬时发生突变,机构会处于以下几种情况:死点、失去稳定、自由度发生变化,使得机构传递运动和动力的能力失常,机构此时的位形称为奇异位形。当置钉装置处于奇异形位时,会丧失一个或多个自由度,因而不能保证其在复杂的手术环境中的灵活性和精确性,同时其末端开路器也无法实现前进运动,导致置钉装置难以有效完成置钉任务。
利用式(9)和式(10)求解置钉装置各关节的雅克比矩阵,其中n,o,a和p是置钉装置末端相对于关节i的转换矩阵的四个列矢量,可由置钉装置正运动学模型中各连杆变换矩阵求得,其中
、
为旋转关节,
为移动关节。
(9)
(10)
所求得置钉装置的雅克比矩阵如式(12)所示:
(11)
(12)
利用可操作度对置钉装置进行奇异形位分析是机器人学中常用的方法。可操作度的定义式为:
(13)
为
的转置矩阵,当ω = 0时,置钉装置处于奇异形位,当ω > 0时,置钉装置处于非奇异形位。
通过编写M文件,遍历置钉装置关节空间位置计算全域空间内的奇异形位,计算得到θ5 = 0,θ3 = 0,θ4 = 0,θ2任意或θ5 = 0或90˚,θ4 = 90˚,θ2、θ3任意或θ5 = 90˚、θ3 = 0、θ4 = 0或90˚,θ2任意时ω = 0,在此位置下置钉装置处于奇异形位,因此在进行置钉装置的轨迹规划时应避开这些形位。
5. 置钉装置运动精度可靠性的分析与优化
5.1. 置钉装置运动精度分析与优化
置钉装置中由于具有双平行四边形结构,理论上可以保证远心点保持在固定位置,但实际由于关节间隙的存在,远心点的末端位姿也会存在一定的误差。在低速运动的条件下转动副间隙可以认为符合连续接触模型 [17] 。如图10所示,OA为孔中心,OS为轴套中心,rA、rS分别为轴与轴套的几何中心在全局坐标系中的位置矢量,e为轴套与轴的偏心距矢量。此偏心距可视为无质量杆(间隙杆),其杆长等于间隙圆的半径,无质量杆的方位角符合[0~2π]的均匀分布。
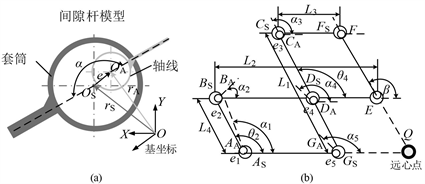
Figure 10. Double parallelogram structure clearance rod model
图10. 双平行四边形结构间隙杆模型图
采用连续接触模型分析关节间隙对平行四边形机构远心点位姿的影响,其中,L1,L2,L3,L4为平行四边形机构四个基本杆长参数;
为铰点A的孔中心坐标,对应于图9中的AS,A’对应于AA,同理可定义其余的铰点B和B’,C和C’,D和D’,G和G’;
分别为杆件AG、AB、BF、CG、CF和DE与水平方向的夹角;
为间隙杆杆长;
为间隙杆方位角。则轨迹点E的实际输出坐标如式(15),轨迹点F的实际输出坐标如式(16)。
(14)
(15)
(16)
在平行四边形ABFQ中,FE和EQ共线,故FE与水平方向的夹角即为EQ与水平方向的夹角,其夹角计算如式(17)所示。在平行四边形GDEQ中,LEQ和LDG相等,因此可得Q点的实际输出坐标如式(18)所示。
(17)
(18)
(19)
综合考虑平面内方向角的因素,实际机构的运动误差概率综合模型可表示如式(19)所示。式中
,
为Q点实际输出的横坐标和纵坐标,
,
为理想位置输出的横坐标和纵坐标。
通过上述步骤,可以获得关节运动变量误差和结构参数误差之间到末端位姿误差的线性映射,基于机构运动输出误差的概念,以远心点运动精度可靠度
为优化目标,四个杆长参数为约束条件,构建其运动精度可靠性概率优化模型。针对机构转动副间隙的随机性特点,设置5个转动副间隙杆杆长均服从:
,i = 1,2,3,4,5。考虑主动杆DG转动角度在[30˚, 150˚]范围内,即平行四边形各杆件与水平方向的夹角满足
。设定允许误差值阈值ε = 0.35 mm,即当末端位置误差在0.35 mm以内,则认为可靠,反之不可靠。在MATLAB中进行N次仿真,其中末端位置误差在允许误差以内的有n次,则该角度下远心点运动精度可靠度如式(20)所示。
(20)
考虑双平行四边形远心点机构处于不同形状时对远心点的运动精度可靠度会产生影响,因此令
在[30˚, 150˚]内变化,每个角度进行500次仿真,求解其处于不同形状时的运动精度可靠度。
如图11结果所示,机构远心点的运动精度可靠度随转动角度几乎不变,可靠度在0.90左右小范围波动,因此可以认为平行四边形机构的远心点运动精度可靠性与平行四边形所处位置形状无关。
综合考虑平行四边形机构形状和关节间隙,初始杆长参数L1 = 200 mm,L2 = 300 mm,L3 = 150 mm,L4 = 75 mm;令
范围内以5˚为步长变化,对每个角度进行500次仿真模拟,计算出远心不动点的运动精度可靠度为RQ = 0.905。
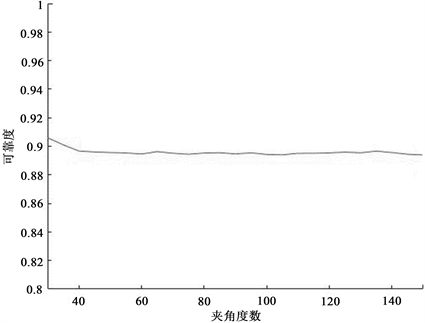
Figure 11. Different Angle telecentric points achieve mechanism reliability
图11. 不同角度远心点实现机构可靠度
依据置钉装置实际结构安装尺寸和平行四边形机构自身的杆长参数限制,设定杆长的约束条件,最终尺寸优化的约束条件如式(21)所示。
(21)
5.2. 置钉装置尺度参数优化
多种群遗传算法是一种模拟自然界生存法则来进行数据优化的智能算法,基于优胜劣汰筛选的原则,使种群通过交叉和变异来实现优化,具有良好的搜索性能,对于准确辨识置钉装置的运动学参数有很大优势。
多种群遗传算法的流程图如图12所示 [17] ,初始化阶段在设计变量参数范围内随机生成N个种群,计算在不同关节转角θ情况下的运动学理论模型跟实际测量的结果,求解优化指标的最小值,接着根据当前种群中个体适应度的大小,将种群中的最佳个体迁移到目标种群,同时淘汰目标群体中的低适应度个体。下一步根据适应度,由人工选择算子将每个群体的最佳个体存入最优种群之中。选择最优种群中的最佳个体与上一代选择的最佳个体进行比较。如果两者相同,那么最好的个体保持代数 + 1,否则不发生变化,并且保存此次选择的最佳个体。将最优个体模型参数与最大模型参数进行比较,如果最优个体模型参数比最大模型参数大,则识别过程终止,并得到变量优化的最优解;否则重复之前相应的步骤,图中pxM、pyM、pzM为置钉装置末端实际位置pxT、pxT、pxT为置钉装置运动学理论位置,P为运动学模型参数,θ为置钉器械的关节转角。
采用多种群遗传算法,以可靠度R最大为目标,对机构的杆长参数进行优化,整个优化过程如图12所示。经过50代优化后,得到相应的优化结果如图13所示:随着进化代数的增加,最优解不断提高直至保持平衡,在杆长参数
,
,
,
条件下,最优解可靠度
,可靠度相比优化前初始杆长参数提高了5.59%,可靠度提升表明了采用多种群遗传算法可以提高可靠度,可靠度的提高表明手术的置钉准确率得到提高。
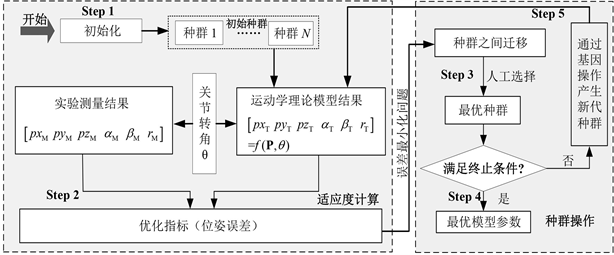
Figure 12. Flowchart of multi-population genetic algorithm
图12. 多种群遗传算法流程图

Figure 13. Multi-population genetic algorithm evolution map
图13. 多种群遗传算法进化图
6. 结论
本文设计了一种椎弓根辅助置钉装置,所设计的椎弓根辅助置钉装置通过双平行四边形机构满足了置钉点的固定位置,差动螺旋机构能够实现置钉过程的微量进给。建立辅助置钉装置运动学模型,并基于Simulink进行仿真验证,同时对其工作空间和奇异形位进行分析。其次,通过间隙杆模型构建了置钉装置的双平行四边形位姿误差与关节间隙间的映射模型,在此基础上进行可靠性指标构建和关键尺度参数分析,最后用多种群遗传算法进行双平行四边形机构尺度参数优化,并以此确定相应的最优机构参数。杆长参数优化后的置钉装置的可靠度提升了5.59%,增强了置钉过程中的可靠性和稳定性,可靠度提升可以提高置钉的准确性,为后续控制系统建立和程序设计实现智能化提供了一定基础。在后续的工作中笔者将进一步搭建实际样机和控制系统,利用实际实验和控制对所设计的置钉装置构型进行验证。