1. 引言
无人机(Unmanned Aerial Vehicle, UAV)是一种由动力驱动、机上无人驾驶、依靠空气提供升力、可重复使用的航空器的简称 [1]。无人机具有低成本、操作方便简单、灵活可靠等优点,近年来发展迅速,在民用领域和军事领域均展现出极大的发展潜力 [2]。在民用领域,无人机在智能交通、森林火灾监测、地质灾害探测、农业植保等方面充分发挥出特有的优势;军事领域中,无人机在搜索侦察监视、边境巡逻搜救、城市反恐维稳等方面应用前景广阔 [3]。无人机愈加复杂的应用环境对其定位精度提出了更高的要求。
由于受到多种误差的影响,仅依靠伪距观测量进行定位的精度通常只有米级,无法满足无人机精细化作业的要求 [4]。随着以载波相位为观测量的高精度实时动态相对定位技术(Real-time kinematic Positioning, RTK)的发展 [5],无人机高精度定位获得了技术解决方案。RTK技术的实现主要是通过基准站发送误差改正信息,由用户站接收并对测量结果进行改正,以获得精确的定位效果 [5]。虽然常规RTK技术能够实现高精度动态定位,但是应用在无人机上仍存在操作繁琐、携带不便、距离受限等问题。随着地基增强系统(Ground Based Augmentation System, GBAS)的不断建设,网络RTK技术得到迅速发展。网络RTK技术利用多个参考站对流动站定位区域形成覆盖,通过大气延迟误差建模或内差的方法,向流动站用户提供差分服务,解决大范围实时精密差分定位的问题 [6],在无人机精细化作业领域中具有广泛的应用前景。因此,本文主要通过设计一款基于网络RTK的嵌入式高精度定位模块以解决无人机精细化作业问题,并通过实验检验了定位性能。
2. 网络RTK技术
2.1. CORS系统
随着全球导航卫星系统(Global Navigation Satellite System, GNSS)技术的快速发展,流动站用户的定位方式已从传统的单基站差分定位方式,发展到现阶段应用最为广泛的多参考站网络差分定位 [7]。连续运行参考站(Continuously Operating Reference Stations, CORS)的基本原理是利用GNSS导航定位技术,在一定所需覆盖范围内,根据需求按一定分布密度建立连续运行的若干固定GNSS基准参考站,利用当代通讯和网络技术,将各个参考站之间,参考站与数据处理中心之间有机连接,经数据中心对参考站上传的观测数据进行整合、处理后,再播发给用户使用 [8]。CORS系统主要包括三个部分:多个连续运行GNSS接收机组成的参考站网、各个基准站与控制中心的数据通讯线路以及对各参考站观测数据进行处理和播发各项服务信息的数据处理中心 [9]。CORS系统组成如所示图1所示。
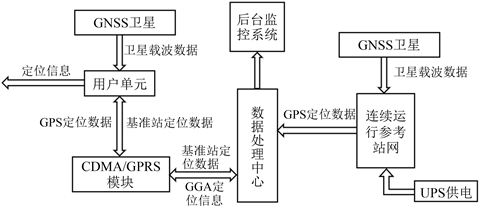
Figure 1. CORS system composition diagram
图1. CORS系统组成图
2.2. 虚拟参考站技术
目前CORS的差分技术主要包括:虚拟参考站技术、主辅站技术、区域改正技术、综合内插技术 [8],其中虚拟参考站(Virtual Reference Station, VRS)技术是目前应用最为广泛的差分技术 [10]。由于RTK技术的定位精度取决于流动站与参考站之间的距离,随着两者之间距离的增加,RTK的定位精度也随之衰减,如果流动站和参考站之间的空间误差很小,就能获得较高的定位精度。虚拟参考站技术的基本原理就是数据处理中心对各个参考站的数据进行分析处理后并利用精确的误差补偿模型在流动站用户所提供的单点位置上虚拟地产生一个参考站 [11]。通过虚拟参考站技术,流动站与虚拟参考站之间的距离就可以控制在几十米内,通过建立差分定位模型即可消除各类空间误差,从而能够得到高精度的定位结果 [7]。虚拟参考站技术如图2所示。
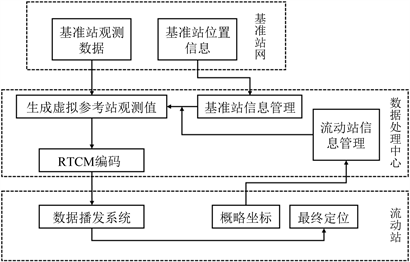
Figure 2. VRS technical workflow flowchart
图2. VRS技术工作流程图
3. 模块设计
根据无人机进行精细化作业时所需要满足的高精度、实时性、小型化、稳定性等要求,提出以下技术指标:
1) 进入RTK固定解后,水平定位精度应在10 cm + 1 ppm以内,垂直定位精度应在5 cm + 1 ppm以内。
2) 定位精度因子DOP (Dilution of precision) [6] 小于1.5,观测到的卫星数应保持在19颗以上。
3) 冷启动条件下首次定位时间应小于1 min,RTK收敛时间应小于30 s。
4) 定位数据更新频率能达到5 Hz及以上能够适配PX4无人机飞行控制系统。
定位模块总体架构如图3所示。
4. 实验验证与结果分析
在开阔环境下对无人机定位模块进行静态、动态定位精度测试分析,并与市面上常见无人机定位模块M8N进行比较,验证定位模块是否达到设计要求。
4.1. 实验测试平台
本文设计的无人机定位模块搭载在Z410-4B科研无人机开发平台上进行测试,四轴无人机如图4所示,定位模块如图5所示。
4.2. 技术指标测试
4.2.1. 首次定位时间测试
本实验场所选取较为空旷的环境,对整个模块进行冷启动的定位测试,首次进入有效解及固定解的时间如图6所示;首次进入固定解的观测及使用定位的卫星数如图7所示。
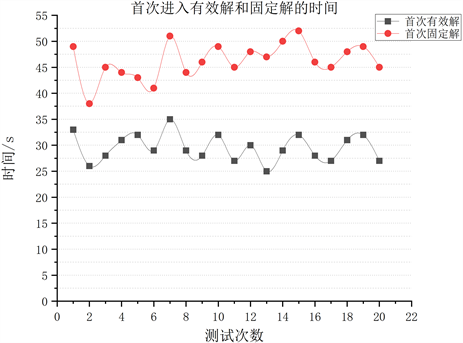
Figure 6. The first time to enter the effective solution and the fixed solution
图6. 首次进入有效解及固定解的时间
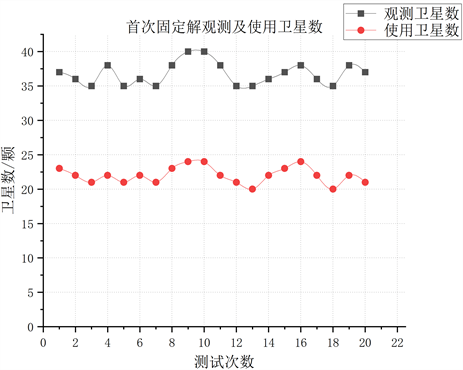
Figure 7. Number of satellites first entered into fixed solutions
图7. 首次进入固定解的观测及使用卫星数
4.2.2. 静态定位精度对比测试
将本模块与无人机上常用的M8N定位模块进行比较以验证定位模块的定位性能,图8和图9分别展示了本模块和M8N定位模块的静态定位精度。
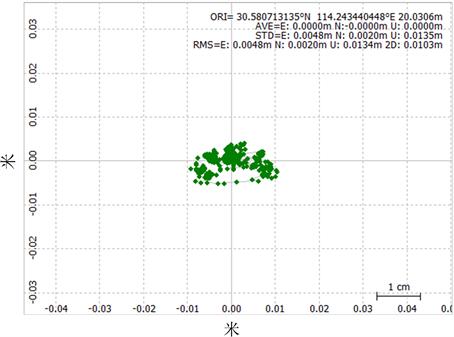
Figure 8. Design module static positioning accuracy
图8. 设计模块静态定位精度
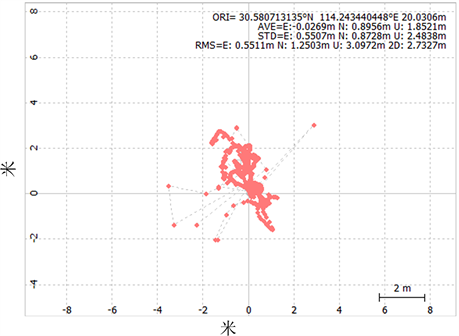
Figure 9. M8N positioning module static positioning accuracy
图9. M8N定位模块静态定位精度
由上图可以看出,相比M8N模块的米级定位精度,本文设计模块在进入RTK固定解后的定位精度可以达到厘米级,大幅提高了无人机作业精细化程度。为进一步测试该定位模块的静态定位精度,使用该定位模块在开阔和遮挡条件下分别连续观测1小时,得到的定位模块固定解定位精度统计如表1所示。

Table 1. System resulting data of standard experiment
表1. 定位模块固定解定位精度统计表
从表中可以看出该定位模块开阔环境下的水平方向精度在2 cm以内,垂直方向的精度在3.5 cm以内,树荫遮挡环境下的水平方向精度在5 cm以内,垂直方向精度在10 cm以内,说明在定位模块进入RTK固定解之后的定位精度较高。
4.2.3. 动态定位性能对比测试
为验证该定位模块动态定位精度,选取学校操场为测试地点,手持该模块匀速步行,采集相应数据,绘制出动态轨迹曲线如图10所示。
连续测试10次后求得RTK固定解、RTK浮点解和差分解在全观测时段中所占比例的平均值,如表2所示。
Table 2. Proportion of solution results of positioning module
表2. 定位模块解算结果比例
通过表格中数据可以看出,该定位模块动态实时定位测试的RTK固定解比例保持在90%以上,定位路径波动小实时性好,表明网络RTK技术应用于无人机定位精度高、结果可靠。
手持所设计的定位模块与无人机上常用的定位模块M8N进行动态定位对比实验,运动轨迹如图11所示,NEU方向偏差如图12所示。
通过轨迹对比图可以看出,参与测试的M8N定位模块在绕行一圈后未能回到原来的起点,而设计定位模块定位结果更加平滑,波动较小,且更加接近真实路线形状。实验条件为人手持两设备进行测试,通过NEU方向偏差图可以看出设计模块在垂直方向偏差比M8N模块小得多,设计模块在U方向的偏差在0.5 m内,M8N定位模块U方向偏差最大为3 m,说明所设计模块动态定位精度更高。
在分析比较两模块的信号质量时,选取两模块均能连续观测的G02卫星,分析其接收信号的连续性以及信噪比。设计的定位模块与M8N定位模块观测的G02卫星的高度角及信噪比如图13所示。
分析两定位模块观测到的卫星高度角及信噪比,设计模块相比M8N定位模块的信噪比连续波动小说明其对信号的捕获和跟踪性能更好。
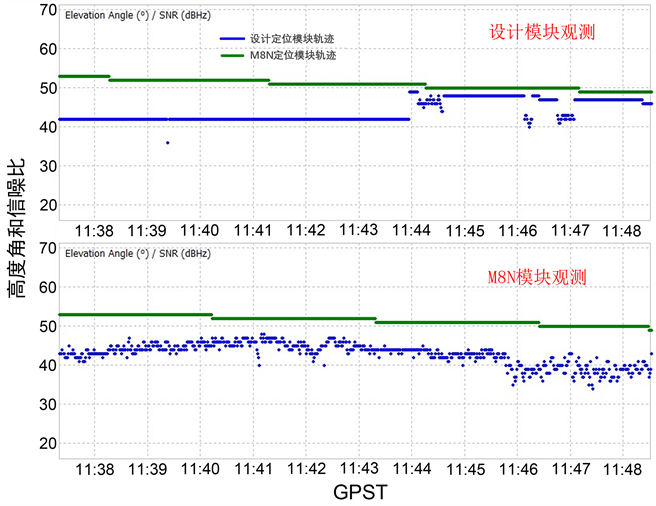
Figure 13. Satellite altitude Angle and signal-to-noise ratio
图13. 卫星高度角及信噪比
5. 结语
针对目前伪距单点定位技术应用于无人机定位精度低等问题,本文设计了一款基于网络RTK的嵌入式小型化无人机高精度定位模块。通过对该模块的定位性能测试并与市面上常用的无人机定位模块M8N的定位性能进行比较分析,测试结果表明该定位模块静态定位精度可达厘米级,相比M8N的米级静态定位精度大幅提升;在动态定位性能上,设计模块垂直方向的精度明显高于M8N定位模块,验证了RTK技术应用在无人机定位上精度高、结果可靠,随着无人机技术的不断发展,该技术具有广阔的发展前景。
基金项目
国家优秀青年科学基金(42122025);国家自然科学基金(41974005);海军工程大学自主研发项目(425317T02A)。