1. 引言
随着航天技术的迅速发展,空间任务对航天器推进系统的需求愈加多样化 [1],呈现出以火箭燃料推进为主力军的多样化的推进技术。在电推进方面出现了霍尔推进、等离子推进、电场推进、电磁推进等新型推进技术,尽管当前这些所有小功率的电推进技术,都有着推力小的缺点,以至于无法在大气层内使用,仍然需要用化学火箭推出大气层,然后需要长时间加速才能达到所需的速度。所有大功率电推进技术,都面临着电从哪里来的问题。太阳能电池板能提供kW级别的电能,借助太空太阳能丰富的优势,通过光电转换等技术,使用这样级别的电能,并随着新的推进动力技术的发展,使电推进等技术与火箭推进技术互为补充,在一定程度上有望实现对有限载荷的空间发射,以更好地满足空间发射任务多样化的需求 [1]。
注意到离心力推进研究的报道,如国防科技要闻2021-11-11发表了一篇关于美国初创公司利用巨型离心机成功完成太空发射试验的文章 [2],提到11月10日,美国航天发射初创公司SpinLaunch,在新墨西哥州的美国太空港成功利用亚轨道加速器原型机成功发射了一枚无动力“抛射体”(projectile)。此次试验是“螺旋发射”概念的首次发射测试,“抛射体”仅被推进到数万英尺的高度。“螺旋发射”概念基于真空密封的离心机,该离心机以数倍声速旋转无动力“抛射体”,然后在“不到一毫秒”的时间内将其抛入高层大气,最终进入轨道。SpinLaunch公司希望颠覆传统火箭发射方式,将航天器送入太空 [2]。
研究离心力用于推进技术的问题,这里有必要对圆周运动的向心力和离心力进行再回顾。
已有文献对惯性离心力以及向心力与离心力的作用关系有明确的表述:惯性离心力(inertial centrifugal force)是随转动坐标系一起转动的物体受到的力,它作用于随动系一起转动的物体上,它不是物体间的相互作用产生的,也不是产生的反作用力,是物体的惯性在非惯性系的反映;离心力(inertial force)是牛顿力,是作用于给曲线运动提供向心力的周围物体上的力,或者说离心力是作用于转动坐标系上的力,它是向心力的反作用力 [3]。
参考文献 [4],275~276页表述,在光滑水平面内以匀速v做圆周运动的质量为m的小球,圆周半径为R,小球所受绳子的拉力F即为其向心力。由于小球的惯性,小球将给予绳子一个反作用力F',即小+球的离心力,二者等值反向 [4]。
由此可见,质点受力改变运动状态时,由于质点的惯性,质点将给予施力物体一个反作用力,这个反作用力称为惯性力。质点惯性力的大小等于质点的质量与加速度的乘积,方向与质点加速度方向相反 [4]。
值得指出的是,质点的惯性力是质点对改变其运动状态的一种反抗,它并不作用于质点上,而是作用在使质点改变运动状态的施力体上。如上例中,惯性力作用在绳子上 [4]。
特别地,跟静止状态物体一样,对做匀速直线运动的惯性状态的物体,当受到垂直其运动方向力(如向心力)的作用时,为反抗使其运动状态的改变,它对施力物体必然有反作用的惯性力(如离心力)的存在。也就是说,向心力与离心力是作用与反作用关系,它们是分别作用于2个不同物体的2个力,等大反向,不能平衡,不能抵消 [5] [6] [7],而不是别的什么关系,必须确立这样的正确认识。认为“只有向心力没有离心力,离心力是不存在的,只是虚拟力”等,这种只有对受力物体(如受向心力作用的做圆周运动物体)的作用,没有受力物体对施力物体以反作用(如所谓离心力是不存在)的观点是违背牛顿定律的,是错误的。本课题——动态约束离心力对系统的推进作用研究,正是建立在向心力与离心力的作用与反作用关系的正确的基础力学理论观点上的,正是利用离心力对向心力的反作用性质,并对其进行有效的动态约束,使其产生对系统的推进作用。向心力与离心力的作用与反作用关系是本课题研究的理论法宝,不是这个理论的支持,所从事该课题的研究将是伪命题。
关于离心力驱动技术的研究是渐进式的,参考文献的电磁驱动式无工质牵引器:201721222213.4 [P] [8],采用小角度电磁力作用,使用2台轴对称的分轴发动机结构设置,达到受控制离心力对整个装置系统的驱动效能。其不足是电磁力作用时间短,做功的电磁能利用率低,由于采用分轴设置,其占用空间大,重量大,制作成本高等。针对以上问题参考文献 [9] [10] [11] 中,对大角度受约束离心力对系统的冲击性作用做了进一步研究,较为深入地认识到受约束离心力对系统作用的性质特征。从直观和便于理解的角度考虑,本文仍以分轴的结构设置模型进行分析。
这里主要针对2维条件下的动态约束离心力对系统的推进作用的问题进行探讨,以便于以后对其3维的推进动力课题的研究创造条件。文中的实验及其数据都是在平常条件下取得的,且主要以获得对原理的定性实验验证为目的,作者对其真实性负全责。
文中第4部分多偏重于定性的理论探讨,走了理论先行的路子,有关相对应的实验研究将在今后给予补充。
2. 动态约束圆周运动系统的动量变化特征
2.1. 动态约束圆周运动系统的动量变化分析
如图1,光滑平面放置平板I系统,在其初始位置建立正交坐标(惯性)系,平板I(质量为
)上承装着以y轴对称设置的2个质量均为m的球
,二者分别绕平板I上的固定轴
做圆周运动,转动半径同为R(刚性不计质量),平板装置全系统的质量
。系统不计摩擦。
如图2,鉴于球
是以y轴对称,为便于研究,分析以球
为例(
类同,讨论略),分2种情况讨论:
情况1是球
从x轴A点出发,沿平行于y轴方向,以匀速v,经
即
到达B点,位移
。其动量变化
在x轴:
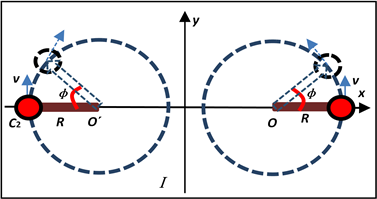
Figure 1. Circular motion with dynamic constraints
图1. 动态约束圆周运动系统

Figure 2. Momentum analysis of circular motion
图2. 圆周运动动量分析
在y轴:
即球C1以速度v做匀速直线运动,其动量改变量为0,没有外力的冲量作用。
情况2是球
从x轴A点出发,以O为转动中心,R为半径,以匀速v逆时针做圆周运动,经
即
(对应的转动角度为
,图中以
为例)到达P点,位移
,其动量变化
在x轴:
在y轴:
由此可看出,球C1以线速度v逆时针做匀速圆周运动,无论是在x轴方向,还是在y轴方向,其动量着实存在改变量,这与情况1比较,就自然得知期间球C1在x轴方向以及在y轴方向都受到冲量的作用,实际上是受到了向心力的作用所产生的动量改变,由
在x轴上受到的向心力冲量:
在y轴上受到的向心力冲量:
这即为,向心力的作用引起球
在x轴以及y轴方向上动量的改变。
根据牛顿第三定律,在x轴方向上对
施以向心力冲量作用的物体,必然受到
沿x轴方向的向心力的反作用。同样地,在y轴方向上对
施以向心力冲量作用的物体,必然受到
沿y轴方向的向心力的反作用,即向心力与离心力是作用与反作用关系 [3] [4] [5] [6] [7],只受力的作用,对施力物体不产生反作用的物体是不存在的,牛顿第三定律与参考系的选择无关,这是因为物体间的相互作用是客观存在的,不因参考系的不同而使物体间相互作用的性质发生变化。受
离心力作用的物体就是平板I。
平板I在x轴上受到
离心力
的冲量:
由于球
是以y轴对称设置,即二者成对称的转动状态,平板I在x轴上受到它们的离心力等大反向,互为动态约束力,整个平板I系统在x轴方向上受到的动态合力为0,即全系统在x轴方向上符合动态平衡
平板I在y轴上受到
的离心力冲量:
还可以看出,
对平板I在y轴上的离心力冲量与
的等大同向,平板I在y轴上受到来自
等大同向离心力的合力作用。在y轴上
受到平板I的向心力冲量,数值上等于平板I受到
的离心力冲量
平板I系统初始为静止状态,即
,经
(即
)末速为
,由动量守恒
由此可知,系统获得的运动速度与其质量比k成反比 [8] [9]。
2.2. 平板系统I初始静止状态与做圆周运动的
以匀速v转动至
同时(即
), 在
区间,沿y轴系统I的平均离心力、周期位移、平均速度
在
区间:
。
在
区间力等大,沿y轴负方向:
。
如
,
,
,
系统I初始为静止状态(即
),在
区间,
以匀速v转动,沿y轴正向的合离心力对系统I做的功W及其周期位移
(即
在
区间以匀速v转动,所对应的系统I受其合离心力作用产生运动的位移称周期位移,表示为
)。
在
区间,离心力对系统I做的功:
又
在
区间,系统I的周期位移:
周期位移与系统的质量比k和转动半径R有关,跟
的转动速度无关,只要系统的结构设置确定,其周期位移就是确定值。
在
区间,系统I的平均速度
:
如
,系统I的平均速度
要达到飞机起飞速度300 km/h,即不到100 m/s,若
,自由状态下
转速达16 rps (960 rpm)就可以;
系统I的平均速度
要达到8 km/s,若
,自由状态下
转速达637 rps (38,200 rpm)超高转速方可。
3. 动态约束离心力对系统的推进作用特征
3.1. 系统初始静止状态与动态约束的做圆周运动球
以匀速v转动至
同时,离心力对系统的推力和运动速度特征 [9]
如图3,系统初始静止状态(即
)与
以匀速v转动至
同时,根据
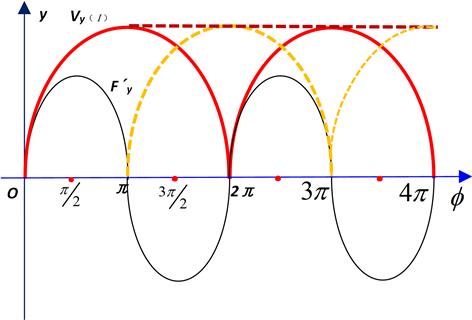
Figure 3. Dynamically restrain centrifugal force and system speed
图3. 动态约束离心力及系统的运动速度
如图3中实线所示,当系统初始静止状态(即
)与动态约束的做圆周运动球
以匀速v转动至
同时,
在y轴方向对系统I的合离心力
呈正弦函数的特征;相对应的系统I在合离心力的作用下,沿y轴正方向呈
函数的周期性直线运动特征 [10]。

Table 1. The impact and linear motion experiments of the dynamic restraint centrifugal force on the system
表1. 动态约束离心力对系统的冲击作用及直线运动实验

Figure 4. Linear motion experiment of a dynamically constrained centrifugal force system
图4. 动态约束离心力对系统的直线运动实验
说明:表1 (图4)实验是在有摩擦(
)水平地面上完成的,采用同轴设置的2个动态约束水平转动的偏心轮(每个的质量
,偏心距15 mm),直流电源(12 V, 10 A)为直流电机供电,电机和偏心轮转速为883 rpm,整个系统在14秒内,无传动水平移动0.9米,验证文中3.1原理。
3.2. 当系统初始静止状态与做圆周运动球
以匀速v转动至
同时,离心力对系统的作用特征 [9]
系统初始静止状态(即
)与动态约束的做圆周运动球
以匀速v转动至
同时,系统I在此合离心力的作用下,沿y轴做简谐振动。对这个问题在此不做详述。
Table 2. Shock and simple harmonic vibration experiments of dynamically constrained centrifugal force on the system
表2. 动态约束离心力对系统的冲击作用及简谐振动实验
说明:如表2所示,此实验是在有摩擦(
)水平地面上完成的,采用同轴设置的2个动态约束水平转动的偏心轮(每个的质量
,偏心距15 mm),直流电源(12 V, 10 A)为直流电机供电,电机和偏心轮转速为183 rpm,整个系统做周期性往复运动,振幅为0.07米,验证文中3.2原理。
3.3. 当系统I的初始静止状态与
的
同时,球
在前、后半周分别做高、低速转动,其合离心力对系统I的推进作用特征 [8] [9] [11]
前文分别对匀速转动条件下的动态约束离心力对系统的周期性直线运动和简谐振动做了表述,尽管理论和实验达到了一致性,但在实际中,做到对系统的这两种初始状态及运动方向的准确掌控,其要求条件是较复杂的。大量的实验结果表明,在控制系统运动方向上,采用前后半周不同转速的设计方法是更为简便和容易做到的。
如图1,使用电机动力,系统在
转动的切线方向的作用力,使其作加(减)速的转动,这样的作用力对圆周运动全系统沿y轴合成的平动作用效果为0,有关变速圆周运动的力学分析可参考文献 [10],这里不做详述。
切向力在
区间的作用使
作高速圆周运动,向心力大,即向心力沿y轴分量的平均值大;
区间使
作低速圆周运动,向心力小,即向心力沿y轴分量的平均值小。由于前、后2个半周向心力沿y轴分量做的功所经位移等值,即二者向心力的y轴分量对作圆周运动的球
在
、
区间所做功数值不等,根据向心力和离心力是作用和反作用的关系,系统没有外力,且当整个系统I的质量M等于转动球
质量的2倍时(见下文4.1),存在向心力沿y轴的分量对球
所做功与动态约束离心力沿y轴的分量对整个圆周运动系统I所做功相等,可使整个圆周运动系统I前半周所获得的向前做功的数值大于其后半周所获得向后做功的数值,则整个圆周运动系统在动态约束离心力的作用下沿y轴正向运动,这就较好的做到了对系统运动方向的有效控制。
简单地说,系统的初始状态很重要,当系统I处于不同的初始状态时,系统就呈现出不同的运动形态。
说明:如表3所示,此实验是在有摩擦(
)水平地面上完成的,采用同轴设置的2个动态约束的水平转动的偏心轮(每个的质量
,直径42 mm,偏心距11 mm),交流电源(220 V, 2 A)给电机供电,整个系统在3秒内,无传动水平移动0.5米,验证文中3.3原理。
Table 3. Experiments on the propulsion effect of the dynamic restraint centrifugal force on the system at different speeds in the front and rear half cycles
表3. 前后半周不同转速动态约束离心力对系统的推进作用实验
4. 动态约束离心力对系统的推进动力问题的几点思考
4.1. 系统推进效能的最佳条件
从做功以及动能的角度,分析做圆周运动球
的向心力沿y轴分量对其所做的功,在什么条件下与动态约束离心力的y轴分量对全系统所做的功数值相等。
如图2,在
区间,
的向心力沿y轴分量所做的功(已知
)
系统初始状态同文3.1,在
区间,动态约束离心力的y轴分量对全系统做的功及动能。
根据前文
令
当系统I总质量M为做圆周运动球
质量的2倍时,
的向心力沿y轴分量所做的功与动态约束离心力的y轴分量对全系统所做的功数值相等 [9]。
4.2. 控制动态约束离心力推进过程中系统的振动,提高工作的稳定性
平板I系统初始为静止状态,即
,经
(即
)末速
图3中的波形显示,系统I的运动过程其振动是比较强烈的,这将影响系统各个部件的工作稳定性,如何减小系统的振动提高其稳定性就成为亟待解决的问题,否则将影响系统正常的工作和寿命。如在以上1组推进发动机的基础上再增加1组推进发动机,且工作时使后者落后前者相位
角度:
如图3虚线所示,系统出现匀速运动的特征,可减轻系统振动,提高各部件的稳定性。也可讨论通过增加N组推进动力装置间工作的协调性,改善推进动力输出效能的问题。
4.3. 系统的质心守恒问题
质心运动守恒定理适用的前提条件是“作用于质点系的外力主矢量恒等于零”或“作用于质点系的所有外力在某轴上的投影的代数和恒等于零”。特别要指出的是,当质点系的外力主矢量不等于零或质点系的所有外力在某轴上的投影的代数和不等于零时,质心运动守恒定理将不再适用。因为力是物体运动状态产生改变的决定因素。图2中,向心力只作用于做圆周运动的物体,使其维持在系统内转动,做圆周运动的物体是不能逃离圆周运动系统的(即做圆周运动物体与系统是同一体关系,且向心力对平板I不发生作用)。为做圆周运动施以向心力作用的物体(如平板I)受到的是离心力的作用,只有当该物体在离心力的作用下产生运动时,离心力将从转动中心轴沿转动半径方向传递作用于转动物体
。实验发现,图1中整个系统初始位置的质心位于坐标原点,2个动态约束转动的球
,同时从平行于x轴位置出发,向着y轴正方向转动至大小为
角的位置,此时整个系统的质心存在沿y轴正方向前移的趋势,根据质心运动守恒定理,为了维持系统的质心位置不变,整个圆周运动系统将发生沿y轴负方向运动。但实验的结果正好与之相反,即整个圆周运动系统实际是在动态约束离心力的作用下,产生沿y轴正方向的运动,这就证实了质心运动守恒定理此时已不再适用,这为通过对离心力进行有效约束,使系统产生单一方向周期性直线运动的研究指出了方向 [9] [10]。
5. 结论
动态约束离心力对系统的推进动力研究,着手于圆周运动物体动量的改变量,从而确定向心力冲量作用的存在,进一步肯定圆周运动物体系统的向心力与离心力的作用与反作用关系。结合动态约束离心力在单一方向对系统的作用特征,在系统特定的初始状态下,实现动态约束离心力对系统的周期性直线运动的推进作用,并对系统推进过程中的运动速度、周期性位移特征做了分析,还对改进其推进效能做了初步的思考。利用太空太阳能发电等技术,结合动态约束离心力对系统的推进方法,实现有限载荷的太空发射,以及对航天器实现运行姿态控制、轨道转移以及水利工程的水下探测等应用提供了新的推进动力的支持,为提高动态约束离心力推进技术的认识,更加广泛拓展其应用空间指明了方向,并有必要做进一步的研究。
致谢
作者真诚感谢论文所引用的各位学者的专著,感谢解放军陆军工程大学驻石家庄校区王莹导师、海军航空兵大学曹延杰老师、北京机械设备研究所刘辉老师、武汉大学张亚东老师、中船重工713研究所吴立周老师等给予研究提供及时有益的启发帮助和素材!感谢给予的精神上的鼓励!