1. 引言
桥式起重机操作方便、搬运范围广、结构简单,被广泛应用与工业装配、港口物流、农业装备等。当小车承载重物在主梁上行驶时,车桥接触点的位置在时刻变化,其形函数矩阵在不断改变,因此这个车桥耦合系统是一个时变系统。在以往桥式起重机的结构设计中,大部分研究员都注重起重机主梁的静态特性研究,从材料力学角度出发对主梁结构进行强度校核以及结构设计,并用有限元静力学分析结果作为辅助验证手段,部分工程师对主梁的模态分析也做了深入的研究。赵俊杰等人 [1] 在不同工况下起升和制动过程建立了动力学微分方程,并采用Matlab进行求解;赵文涛等人 [2] 利用有限元软件分析了小车位于主梁跨中和悬臂端时的模态特性;李心爽等人 [3] 研究了移动质量与主梁耦合系统对固有频率的影响。但很少有学者研究小车承载重物在主梁上移动时的动态特性。
本文采用有限元分析方法,把主梁化为欧拉梁模型,将小车、钢丝绳及重物作为在梁上移动的弹簧质量系统,考虑不同的质量、小车移速、钢丝绳刚度的影响,计算分析桥梁的振动特性。
2. 移动质量弹簧系统基本理论
移动质量弹簧系统如图1所示,将主梁当作两端简支的欧拉梁模型,其动力平衡方程为:
(1)
式中,
和
分别为梁的弯曲刚度和单位长度质量,
表示梁在距离
处
时刻的挠度,
为质量弹簧系统在梁上的移动速度,
为Dirac函数,
为梁所受到的作用力,假设
为小车的竖向位移,
为重物的竖向位移,
可表示为:
(2)
式中,
和
为小车和重物的质量,
和
为钢丝绳的刚度和阻尼。
由于小车和主梁始终接触不分离,因此有耦合条件:
(3)
根据振型分解法,简支梁振动时的动位移
可表示为:
(4)
将(4)式代入(1)式,乘以形函数
,并沿主梁长度L积分,可得第n阶模态的振动方程为:
(5)
(6)
其中
为简支梁第n阶固有角频率,
为第n阶模态阻尼比,再将(3)式和(4)式代入(2)式得:
(7)
将(6)式代入(5)式得:
(8)
重物
的动力平衡方程为:
(9)
取前N阶,联立(7)式和(8)式并写成矩阵的形式:
(10)
运用四阶龙格库塔求解(10)式微分方程就可得到小车在主梁上运动的时程曲线。
3. 有限元模型
3.1. 主梁网格划分
某单梁桥式起重机箱型主梁结构网格划分如图2所示,钢质主梁横截面为箱型结构,跨度l为15 m,额定起重量为5 t,主梁结构的横截面数据如表1所示。

Table 1. Cross section parameters of main beam
表1. 主梁横截面参数
 (a) 主梁横截面网格 (b) 主梁网格
(a) 主梁横截面网格 (b) 主梁网格
Figure 2. Grid division of box girder structure
图2. 箱型主梁结构网格划分
根据横截面参数,可计算出主梁截面惯性矩 [4]:
通过式(6)可计算出简支梁的前三阶理论固有频率为5.049 Hz、20.197 Hz、45.443 Hz。
3.2. 主梁模态分析
本文采用有限元软件先对主梁进行模态分析。主梁采用beam188单元主梁采用beam188单元 [5],弹性模量为2E11Pa,密度为7850 kg/m3,边界为两端简支,当小车满载位于主梁不同位置时,计算了前四阶固有频率和振型,前四阶固有频率如表2所示,前六阶振型如图所示。
Table 2. Modal natural frequency of main beam of single beam bridge crane
表2. 单梁桥式起重机主梁模态固有频率
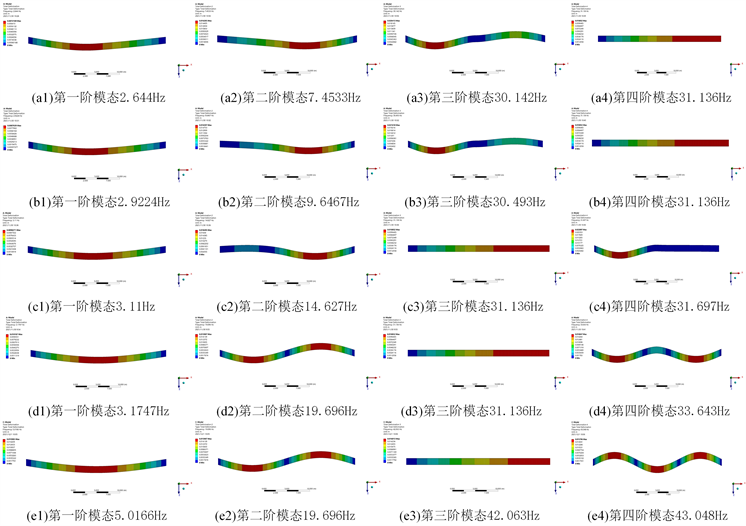
Figure 3. Modal shape of main beam ((a) the trolley is located at the extreme position of the left end; (b) the trolley is located at 1/6 of the left end; (c) the trolley is located at 1/3 of the left end; (d) trolley in mid-span position; (e) no trolley)
图3. 主梁模态振型((a) 小车位于左端极限位置;(b) 小车位于左端1/6位置;(c) 小车位于左端1/3位置;(d) 小车位于跨中位置;(e) 无小车)
由图3可知,单梁桥式起重机在简支边界条件下,前四阶固有频率及振型有所变化,中间弯曲振型始终为第一阶模态,一阶固有频率随小车靠中小幅上升了0.53 Hz (20%)。右侧弯曲振型所对应的模态随小车往中移动变化较大,固有频率增加了12.24 Hz (96%),而左侧弯曲模态相对右侧弯曲模态其固有频率变化较小,只增加了1.56 Hz (5.16%)。当小车移动到跨中位置时,左侧弯曲和右侧弯曲模态消失,合并成为S形弯曲模态,二阶固有频率明显上升。小车位于任何位置,轴向拉伸所对应的模态固有频率始终不变。若只考虑主梁自身模态,其各界固有频率比有小车时略有升高,与理论固有频率非常接近,因此,当小车承载重物越靠近边界时,其前四阶固有频率越小,与文献 [6] 中的结果趋势相近,在设计主梁结构以及额定承载时,需考虑小车在边界时的承载能力。
3.3. 移动质量弹簧系统有限元分析
由于小车在主梁上运动时,小车始终与主梁不分离,因此本文采用位移耦合法来分析主梁在移动质量弹簧系统下的振动 [7]。主梁仍然采用beam188,具体参数如表2所示。小车和重物都采用Mass21单元,用Combin14模拟钢丝绳,本文采用循环求解的方式,根据小车的移动速度施加水平节点位移,并将小车质量单元与梁单元在竖直方向做节点耦合,使小车经过主梁上的每个节点,从而实现小车的移动。将小车在左端时的静力学解作为初始条件(零初始速度、有初始位移),运用NewMark方法对该动力学模型进行求解。
图4为钢丝绳刚度为3 × 106 N/m,阻尼1 × 104 kg/s,小车在满载状态下以3 m/s运动时主梁跨中响应曲线理论与有限元的对比图,从图中可以看出,有限元解与理论解十分相近,验证了有限元模型的正确性。

Figure 4. Theoretical solution and finite element solution
图4. 理论解与有限元解

Figure 5. Midspan displacement and acceleration of main girder under different conditions ((a) different load mass; (b) different moving speed of trolley; (c) different stiffness of wire rope)
图5. 不同条件下主梁跨中位移和加速度((a) 不同承载质量;(b) 小车不同移动速度;(c) 钢丝绳不同刚度)
图5展示了小车承载不同重量,小车不同移速以及钢丝绳不同刚度对主梁跨中位移的影响。结果表明,小车承载质量对主梁结构响应影响较大,在前半段位移中,质量越大,跨中位移以及加速度幅值都越大,后半段由于受到阻尼影响,质量越大振幅的衰减速度也较大。小车在主梁上的移动速度对结构位移响应很小,但是对加速度响应影响很大,速度增大会使跨中加速度响应幅值显著增大。钢丝吊绳的刚度对结构位移响应和加速度响应影响十分微小,因此可以忽略刚度对起重机的影响。
4. 结论
本文以单臂桥式起重机为研究对象,分别运用理论与有限元计算了主梁的模态以及振动响应,得出以下结论:
1) 在两端简支的边界条件下,小车靠近边界时,系统的模态固有频率越高,随着小车向中移动,系统两边弯曲的振型会消失。
2) 小车承载重物在主梁上移动的过程中,承载质量和速度对结构响应影响大,钢丝吊绳刚度的影响极小,因此在简化模型时可以忽略弹簧刚度对系统带来的影响。