1. 引言
近年来无人机航测技术凭借其作业成本低,操作简单等特点,已经广泛应用于各种测绘项目中 [1] [2] [3]。目前多数无人机体积较大,不便携带,特别是对于一些测区较小的项目,使用大型无人机作业,项目成本较高。消费级单镜头无人机凭借体积小、重量轻、便于携带等特点,常应用于测区小面积测绘项目 [4] [5]。利用该类无人机进行倾斜摄影存在井字飞行和五向飞行两种航线规划方式。这两种航线规划方式在建模效果和模型精度方面有何区别尚未有明确结论。目前航测作业,常用五向飞行航线规划方式进行数据获取,但五向飞行作业时间与数据量,均大于井字飞行,因此对于这两种航线规划模式所生成模型的研究,具有较强的现实意义和科学价值。三维建模精度作为倾斜摄影测量技术可行性的直观体现,目前在国内也有一定的研究进展。马梦莹等认为航拍影像的数量越多,生成的建筑物三维模型精度越高,航拍高度越高,生成的建筑物三维模型精度越低 [6]。张广振对利用无人机倾斜摄影测量技术进行大比例尺地形图测绘方法进行了研究,总结出了一些相关经验,为无人机倾斜摄影测量技术的应用提供了一定的经验 [7]。张佑林对无人机航摄影像生产的大比例尺地形图进行了误差分析并提出了相应的改善措施 [8]。任栋等提出,在航摄相机的内方位元素以及相机检校参数正确时,消费级免像控无人机如精灵四RTK,在无像控情况下可以满足1:500比例尺地形图的精度要求 [9]。目前还没有针对单镜头无人机两种飞行方式所获取三维模型精度进行对比的文献。本文以深圳大疆精灵四RTK无人机为例,分别进行五向飞行与井字飞行倾斜摄影数据获取,对两种航线所生成模型进行对比分析,实验结果为单镜头无人机在倾斜摄影测量项目中的应用提供了一些借鉴。
2. 航线规划
2.1. 井字飞行航线
精灵四RTK无人机在井字飞行航线下执行飞行任务时,以本文实验为例,首先以当前测区的东北角为起点,向南飞行并到达当前航路的最南端,之后无人机调转机头向东飞行进入下一条航路的最南端,并再次调转机头向北飞行至最北端,直至无人机按照此方法对整个测区完成一次覆盖拍摄,之后无人机对整个测区再次完成覆盖拍摄,拍摄时无人机前进的方向与第一次拍摄时无人机前进的方向垂直。两次覆盖拍摄在一条航线下完成,拍摄途中不切换其他航线。这样就可以通过一条航线来完成4个倾斜视角的拍摄。但是由于无人机在空中会调转机头飞行,旁向重叠率会降低,因此在执行井字飞行时,需要增大旁向重叠。井字飞行航线示意图如图1所示。
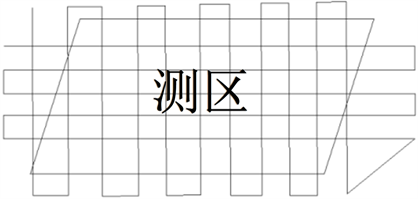
Figure 1. Diagram of well shaped flight route
图1. 井字飞行航线示意图
2.2. 五向飞行航线
与井字型航线不同,五向飞行航线在飞行时需要切换五条航线,来进行正射视角和四个倾斜视角的拍摄。在执行飞行任务时,无人机首先将镜头竖直向下对测区进行拍摄,完成整个测区的一次覆盖拍摄之后,无人机自动切换至下一条航线,镜头自动调整至预先设计的角度,开始执行该航线。之后同上,直到将五条航线全部执行完毕。在该航线整个飞行过程中无人机不会再调转机头,相机始终朝着一个方向拍摄。五向飞行航线示意图如图2所示。

Figure 2. Schematic diagram of five way flight route
图2. 五向飞行航线示意图
3. 实验方案设计与结果分析
3.1. 实验区与实验条件介绍
本文实验区选择在许昌学院某区域,如图3所示,测区面积约0.06 km²,飞行区域内最高点高度约为100 m,最低点高度约为20 m。建筑物高度不一,需要注意无人机航线航高。既要保证模型精度达到要求,又要保证飞行器作业安全。
本文实验用电脑处理器为Intel(R) Core(TM) i7-8700 CPU @ 3.20GHz 3.19 GHz,显卡为NVIDIA GeForce GTX 1060 6GB,磁盘为4T机械硬盘。实验使用建模软件为ContextCapture软件。
3.2. 实验流程设计
首先进行像控点的布设,像控点采用RTK实测方式,共布设5个地面像控点,分别布设于测区4个边缘以及中心处。之后对井字型航线和五向飞行航线获取数据进行处理,分别生产免像控模型和加像控模型。最后通过野外测量检查点与模型点对比的方式进行精度分析。实验流程如图4所示。
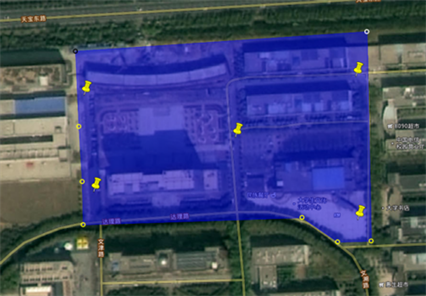
Figure 3. Diagram of experimental area and image control points distribution
图3. 实验区及像控点分布示意图
3.3. 井字航线获取倾斜摄影数据
利用该无人机系统中自带的航线规划软件规划航线,飞行时不但要确保无人机飞行安全,还要能够保证较低点的分辨率合格以及较高点的纹理清晰,避免产生漏洞。因1:500比例尺地形图的平面精度要求为不低于0.05米,即1:500比例尺地形图中应当可以区分出直径大于5 cm的地物,故需要使相机拍摄的照片分辨率小于5 cm。根据上述理论,无人机执行任务时的航高设置为140米,航向重叠率设为80%,旁向重叠率设为80%,影像地面分辨率3.84 cm,返航高度设置为140 m,云台倾斜角度设置为−60˚,拍照模式设置为等距离拍照,本次飞行获取影像数量为371张,最高点地面分辨率1.4 cm,最低点地面分辨率3.84 cm。
3.4. 五向航线获取倾斜摄影数据
五向飞行航线航向重叠率设为80%,旁向重叠率设为70%,进行五向飞行时需注意相机倾斜角应当设置为−45˚。航高设置与井字型航线的参数设置相同。本次飞行获取影像数量为637张,最高点地面分辨率1.3 cm,最低点地面分辨率3.84 cm。
4. 三维建模与结果分析
4.1. 三维建模
本文实验对两种航线规划方式分别进行了免像控与加像控两组建模实验,对有无像控参与建模对三维模型的精度进行了对比。
实验一:五向飞行航线与井字航线免相控建模
本实验利用无人机拍摄影像自带POS信息进行三维建模。实验一处理流程如图5所示:
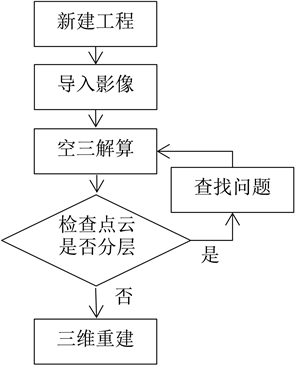
Figure 5. Data processing flow chart of Experiment 1
图5. 实验一数据处理流程图
实验二:五向飞行航线与井字航线加像控建模
本实验将地面控制点加入空三解算,具体流程图如图6所示;与实验一不同,本实验需要进行至少二次空三,第一次空三利用无人机影像自带POS解算,第二次空三加入地面控制点进行平差,第二次空三完成后,查看控制点精度,若满足误差要求,即可提交重建。
4.2. 实验结果对比分析
五向飞行的4个倾斜航线旁向重叠率以同朝向的航线进行计算,井字飞行旁向重疊率以相邻相反的航线进行计算。井字航线旁向重叠设为80%时,对应于五向航线倾斜任务60%旁向重叠。根据倾斜摄影测量理论,重叠率越大,获取纹理越充分。相机倾斜视角的角度越大,获取到的建筑物侧面纹理就越多,从图7可看出,由于井字型航线在获取数据时,相机倾斜角度较小,因此相比于五向飞行,井字飞行的模型拉花以及空缺也更为明显。
为对比模型的精度,本文采用RTK实测检查点,检查点数量为25个,均匀分布于整个测区,且地物清晰具有明显的标志,便于外业测量和模型量测。检查点分布图如图8所示。选择RTK测量模式为碎步测量,到达待测点后等待RTK卫星解变为固定解,且高程误差小于3厘米时开始测量,测量时选择平滑十次。检查点测量完成后,进行对应模型点的量测,量测时将量测点放大,本文用量测十次取平均值的方式来获取对应点的模型坐标。将检查点的地面坐标与模型坐标进行对比分析。

Figure 6. Data processing flow chart of Experiment 2
图6. 实验二数据处理流程图

Figure 7. Comparison of modeling effects between five-way flight and well shaped flight
图7. 五向飞行与井字飞行建模效果对比
对实验一进行精度分析得表1,从表1可以看出,精灵四RTK在免像控模式下,井字飞行获取的数据,建模的水平中误差为0.029 m,高程中误差为0.041 m。同样,用五向飞行获取数据,建模的水平中误差为0.025 m,高程中误差为0.042 m。根据误差理论,中误差的大小反应了该组观测值精度的高低。国家测绘行业标准《基础地理信息数字成果1:500、1:1000、1:2000 数字线划图》对数字线划图和数字正射影像的平面精度及高程精度的要求,1:500比例尺地形图的平面位置中误差为0.3 m,高程中误差为0.2 m,其中要求最大允许误差不得超过中误差的2倍。井字飞行在免像控模式下建模的平面最大误差为0.049 m,高程最大误差为0.084 m。五向飞行平面最大误差0.045 m,高程最大误差为0.084 m。由此得出结论,无论是平面精度还是高程精度,井字飞行和五向飞行均满足1:500比例尺地形图所需精度标准。

Table 1. Checkpoint accuracy of Experiment 1/m
表1. 实验一检查点精度/米
对实验一中检查点的精度分布情况进行统计分析后,根据图9中检查点的分布情况,井字飞行模型成果检查点的平面精度主要分布在0.01~0.04 m之间,高程精度主要分布于0.01~0.06 m之间。五向飞行模型成果检查点的平面精度主要分布于0.01~0.03 m之间,高程精度主要分布于在0.02~0.06 m之间。由此可以看出,在井字飞行的模型成果中,精度波动较大,五向飞行的模型成果中,精度波动较小。无论井字型航线还是五向飞行,平面精度的稳定性相对高程精度的稳定性均较高。
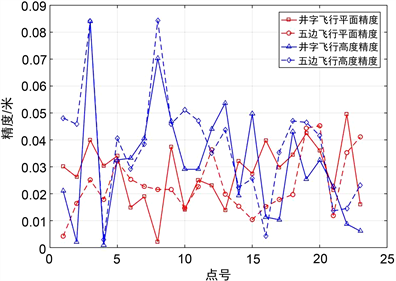
Figure 9. Distribution of checkpoint accuracy in Experiment 1
图9. 实验一检查点精度分布
对实验二进行精度分析得表2,由表2可看出,在加入控制点之后,井字飞行和五向飞行建模精度均有所提升,且控制点的加入使得检查点的最大误差都出现了降低,且高程误差的降低更为明显。
Table 2. Checkpoint accuracy of Experiment 2/m
表2. 实验二检查点精度/米
对实验二中检查点进行统计,得到图10所示的4个散点图。从图10可看出,在加入控制点进行平差后,高程精度明显有所提高,且相对稳定,但平面精度并没有因为控制点的加入提高太多。

Figure 10. Distribution of checkpoint accuracy in Experiment 2
图10. 实验二检查点精度分布
本文对井字型航线和五向飞行航线各流程所需的时间进行了统计,结果如表3所示,从表中可观察到,五向飞行方式在各处理流程中均比井字飞行方式耗时多。两者在外业数据获取上时间五向飞行用时45分钟,井字飞行用时35分钟,差10分钟。第一次空三处理以及建模时,五向飞行所需时间成倍增加,空三解算时间是井字飞行处理的1.8倍,建模时间是井字飞行的2.2倍。
Table 3. Time comparison of each treatment process/min
表3. 各处理流程用时对比/分钟
5. 结论
本文以许昌学院某区域为研究区,设计了使用大疆精灵四RTK无人机用井字型航线与五向飞行航线获取数据的实验,并对两种不同的数据获取模式生产的三维模型进行了对比分析。实验以RTK实测地面坐标为参考值,对比了该无人机两种数据获取方式生产的三维模型在精度方面的优劣,同时探究了使用像控点对这两种数据获取方式建模的影响,最终得出如下结论:
1) 井字飞行无论是外业航飞还是内业建模,其耗时比五向飞行更短。
2) 井字飞行与五向飞行无论是免相像建模还是加入像控点,其精度均可以满足1:500比例尺地形图测图精度标准。
3) 五向飞行建模相比于井字飞行建模,其平面精度更加稳定且更高,而高程精度两者差异不大。
4) 加入控制点进行平差后,两者无论是平面精度还是高程精度都有所提升,且高程精度变化更大。
基金项目
河南省科技攻关(212102310419)。