1. 引言
随着经济的不断发展,工商业活动与贸易往来日益频繁,城市交通需求发生了前所未有的迅速增长。同时,也带来了诸如交通安全、交通拥堵、环境污染等。
一系列问题,这些问题时时刻刻影响并威胁着人们的日常生活。尤其是在大中城市中,停车位不足己经是出行者日常出行中要面临的严重而突出的问题。例如出行者在日常出行过程中常常面临着到达目的地后没有车位可停的风险。对于驾车出行者来说,当工作单位停车需求大于停车位供给时,出行者会因为抵达停车场过迟而找不到合法停车位,而不得不选择违法停车,并因此受到处罚。再例如车主因车位被占用而引发的冲突也时有发生。调查显示,为了找到路边的停车泊位,司机在路上的平均行程大约为8分钟,并且在拥挤的道路上大部分车辆都在等车,这证明了停车难是造成道路拥堵的原因之一 [1]。
2. 总体设计
该系统由三大部分组成:远程服务器、工业控制计算机、车位锁。工业控制计算机上安装了1个或更多的摄像机,不断轮循调用摄像头拍摄,对拍摄的照片调用车牌识别算法,如果识别出照片中有车牌号码,服务器将车牌号发送到服务器,服务器会对车辆牌号进行查询,服务器会向工业控制计算机发送开锁指令,服务器将车辆牌号查询,如果有停车权限,服务器会向工业控制计算机发送开锁指令,然后车辆将开锁指令,服务器会将车牌号查询,如果有停车权限,服务器会向工业控制计算机发送开锁指令,然后车辆泊入,否则不会开锁。图1中显示了系统拓扑结构 [2] [3]。
3. 车位锁控制系统设计
3.1. 锁臂升降控制系统
车库门锁的主要部件包括MCU主控制、直流减速电机、锁臂、锁定状态检测电路。如图2所示,MCU收到锁的控制命令后,从锁状态检测电路中读取锁的当前状态,通过电机驱动模块控制直流减速电机进行开锁操作。若为开锁命令,控制锁臂与地面成水平角度,若为锁臂命令,锁臂与地面成90˚。
电机驱动芯片采用RZ7888,其中RZ7888引脚1.2通过电阻R63、R62与MCU通用IO连接,如图3所示。RZ7888输入与输出逻辑关系如表1所示。MCU根据表1可控制直流减速电机自由正反转 [4]。
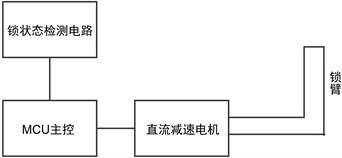
Figure 2. Schematic diagram of lock function
图2. 锁臂功能简图
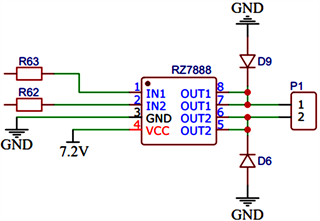
Figure 3. Dc reduction motor drive circuit
图3. 直流减速电机驱动电路

Table 1. Table of input and output relationships of RZ7888
表1. RZ7888输入输出关系表
3.2. 锁状态检测电路
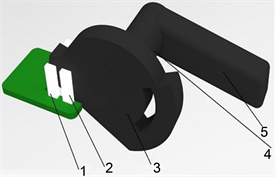
车位锁结构如图4(a)所示,车位锁开、关巾锁臂状态决定,锁臂升起来,车位锁锁住,否则开锁。转轴与锁臂连接,直流电机带动转轴转动。锁臂状态由转盘遮挡两个红外对管状态感知。其中图4(a)为开锁状态,图4(b)为上升或下降(运动)状态,图4(c)为上锁状态。
 (a)
(a) 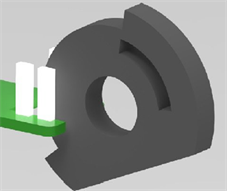 (b)
(b)  (c)
(c)
Figure 4. Principle of lock position detection (1. infrared receiving tube; 2. infrared receiving tube; 3. turnplate; 4. rotation shaft; 5. the lock)
图4. 锁位置检测原理(1. 红外接收管;2. 红外接收管;3. 转盘;4. 转轴;5. 锁臂)
如图4所示的锁状态检测转盘设计,转轴通过转盘与锁臂相连,控制车位的开关锁定状态。利用双红外对管法检测转盘旋转位置。转盘挡住了图4(a)位置的两个红外线接收管,此时锁状态是打开的。在图4(b)位置,转盘挡住红外线接收管2,红外线接收管1透光,此时锁处于上升或下降(移动)状态。在图4(c)位置上,转盘将红外线接收管1覆盖,红外线接收管2透光,此时锁已关闭。红外线接收管信号接入比较电路,将接收管的红外线状态变为高、低信号。图5显示了它的电路原理 [5] [6]。
以T1、T2作为红外对管,两个接收管分别接R4、R5的分压电阻。电动机带动转轴转动控制锁开关时,红外接收管接收到的红外线光发生变化,接收管的分压发生变化。在比较器LM339的插头5和插针7上连接两个接收管的两个分压信号。红外线接收管接收到红外光后,LM339的输出通道输出低电平,否则输出高电平。在通过比较电路之后,T1的输出信号是O1,T2对应的输出信号是O2,O1、O2信号对应的锁定状态如表2所示。
Table 2. Relationship between lock status and O1 and O2 signals
表2. 锁状态与Ol、O2信号关系
4. 程序设计
系统软件设计包括工业计算机端车牌识别算法、与服务器端的数据交互。服务端软件设计功能包括数据库表格设计、用户注册、泊车预约、泊车缴费等。
4.1. 工业控制计算机程序设计
启动工业控制计算机后,装入第三方车辆牌照识别模型进行车牌识别,启用计时功能。若小汽要进入某车位,执行倒车动作,工业控制计算机可以从拍出的照片中识别出车牌号码,将车牌号通过网络上传给服务器,等待服务器返回停车权限信息。在服务器查询车牌号码后,将停车权限查询结果传回给工业控制计算机,由工业控制计算机对服务器反馈信息进行处理,控制车位锁。图6显示了该程序处理流程 [7]。

Figure 6. Industrial control computer processing flow
图6. 工业控制计算机处理流程
4.2. 服务端程序设计
服务端主要记录车位锁管理数据,用户注册数据,接收工业控制计算机发来的车牌号、地锁号码,按车牌号、地锁号码查询反馈车辆停车权限。为客户端提供访问、配置接口,客户端可以通过小程序、APP、网页进行注册操作。在车辆驶近车锁、工业控制计算机识别车牌号码后,将车牌号码和当前车锁号码发送给服务器,服务器工作过程如下图7。
工业控制计算机将车位锁号码发送到服务器,要求服务器判断权限,服务器首先根据车位锁号查询车位锁号码(车位锁号码可以查询车位锁的类型,车位锁类型可以为车位或者充电车位),然后对车牌号进行查询,服务器会先判断车辆的锁号,服务器会先根据车位锁号查询车位锁的类型(车位锁类型可以为充电车位或者充电),然后对车牌号进行查询,否则服务器会要求服务器判断权限,服务器首先根据车位锁号查询车位锁的类型(车位锁类型可以为充值或充电) [8] [9]。
如有权限停车,工业控制计算机控制车位锁臂下降,允许车辆停车,当车辆进入车位后,向服务器发出入库确认信息,服务器记录车牌号、车锁号码、出库时间。
车开出车位,工业控制计算机检测到车开走,控制车位锁锁臂抬起,将车位锁上,将车位锁上,将车发往服务器,服务器对服务器的出库信息进行查询,服务器对记录的数据进行查询,将相应的记录加入,按费用计算公式,计算相应费用,向用户发送扣费信息。使用者可以使用相应的APP或者微信小程序进行支付。
5. 实验测试
实验测试部分针对车牌识别准确率、数据库功能及控制逻辑、整体功能测试等。
5.1. 工业控制计算机对车位锁控制测试
工业控制计算机以树莓派4B为核心板,采用无线遥控控制车位锁的方法,分别对应不同的IO口的开锁和上锁,用IO口来发送车位锁。试验过程如下,树莓派根据开锁、上锁IO口的输出信号,观察车位锁的动作,实验表明,树莓派可以完成车位锁的无线遥控操作,在发出控制命令后,车位锁上升、下降耗时约2 s。
5.2. 车牌号码测试
工业控制计算机通过一个USB接口与摄像机连接,其最高分辨率为1920 × 1080,感光元件类型为 CMOS,接口标准USB2.0。北京智云科技的识别算法是开源的免费版本,程序识别车牌后,打印出来方便用户与真实的数字对比。将车牌号图片在网上随机搜索,黑白打印A4纸,放置在0.5米以内进行检测。经过多次重复测试,证明该算法对车牌有较好的识别效果,识别率大于95%。图8显示了实验的流程。图片右侧是照相机拍摄到的车牌照片,左边是程序识别到的车牌号码 [10]。

Figure 8. Test of licence plate recognition rate
图8. 车牌识别率测试
5.3. 服务器测试
在服务器测试部分进行用户注册测试、管理员添加删除车牌号码测试、添加车位锁定测试。采用工业控制计算机模拟实际场景,对车牌号码发送到服务器的查询权限请求。图9是注册测试实验结果,图10是预约停车测试。
5.4. 综合测试
整体测试过程如下,将车位锁、工业控制计算机、摄像机安装在车位上,将小车慢慢倒入车库。试验过程表明,小车进行倒车入库操作,工业控制计算机识别车牌号码后发送到服务器,服务器完成权限判断返回结果,由工业控制计算机完成,工业控制计算机按权限完成对车锁的控制,测试场景如图11所示。
6. 结束语
本论文基于智能车位锁的路边车位管理系统整体方案制定与关键技术优选。根据系统功能需求进行总体方案制定,并在关键技术上进行了优化设计。设计制作了一种基于视觉识别车牌号码的车位锁管理系统,该系统由三大部分组成:远程服务器、工业控制计算机、车位锁。在车位锁上安装带有车牌识别功能的工业控制计算机和车位锁,工业控制计算机通过不断轮循调用摄像头拍摄,对拍摄的照片调用车牌识别算法,无线控制车位锁开关。在远程服务器上安装了工业控制计算机和工业控制计算机通过网络连接的车位锁管理数据库,服务器对车辆牌号进行查询,如果有停车权限,服务器会向工业控制计算机发送开锁指令,然后车辆将开锁指令。工业控制计算机识别出牌照后发送到服务器,由服务器管理程序判定小车开进车位,小车离开后,服务器自动生成账单并推送客户完成支付。资料显示,在工业控制计算机上,树莓派4 B运行内存为2 GB,摄像头分辨率参数为1980 × 1080,拍摄视角72˚,在USB2.0测试条件下,系统车牌识别时间小于4 s。使用阿里云服务器、1核1 G、带宽1 Mbps的测试条件下,工业控制计算机向服务器查询结果发送请求的时间小于0.5 s。由小车进行逆向入库操作,当小车与车库的夹角小于450时,系统能准确地识别出小车的车牌号。本系统从识别牌照、上载服务器、服务器权限判断、控制地锁操作完成时间大约在4.5 s左右,实验表明系统能很好的实现对车位锁的精确管理,提高车位管理的自动化水平。
6.1. 优势
6.1.1. 系统整合功能更全面
由于路边停车位的开放性和临时性,致使相关智慧泊车系统种类较少、功能单一且实用性不强。已有系统多以路段车位总数和收费标准的信息查询为主功能,本系统在此基础上完善了车位超前预定、定向导航和在线付费等功能,实现了无人化自助停车,提高了停车效率,节省了管理人力,减少了违停和逃费现象。
6.1.2. 开发成本更低
当前市面路边停车类系统配套车位锁成本较高。本次设计,以实现硬件核心功能为主,配合成本优先原则和系统后续可升级性进行硬件选型,大幅降低了开发生产成本,有利于企业进行批量化生产。同时,在软件平台开发方面进行标准化和流程化,简化开发步骤、降低开发门槛,实现了低成本的智能路边停车系统开发。
6.1.3. 平台模式更新颖
市面智能泊车系统多为APP模式,需要用户下载且注册,在大量占用手机内存的同时,增加了用户信息泄露的隐患,增大了用户对于APP的不信任感。本系统可以采用微信小程序作为呈现平台,拥有大量微信受众基础,操作简单且无需下载、随用随进,安全性和可靠性较高,有利于企业进行商业化推广。
6.2. 展望
本次基于智能车位锁的路边车位管理系统设计能够将车位的信息联网、满足预定和在线缴费等功能需求,实现路边车位无人化管理。后续系统功能在以下几个方面进行升级,以求更高效的应用。
6.2.1. 供电升级
受路面建设影响,智能车位锁只能选用电池供电。考虑电池更换条件等因素,本设计选用蓄电池,但需人为定时充电。后期可根据路段位置考虑使用太阳能电池,使用太阳能充电以节省人力。
6.2.2. 智能车位锁程序更新升级
路边车位位置分布离散,单个车位锁升级维护工作量大。后期开发考虑增添在线升级功能,可以使软件更新运维更加便捷高效。
6.2.3. 模式升级
参考“共享模式”,考察私家车位租赁市场情况,整合闲置私家车位信息,推出“错时车位”租赁功能,提高停车位使用率,更好缓解当前停车难现状。
NOTES
*通讯作者。