1. 引言
本文考虑如下的捕食者具有Allee效应 [1] 和其他食物来源的Leslie-Gower [2] [3] 捕食食饵模型:
(1)
其中
分别表示食饵和捕食者t在时刻的种群密度,
表示食饵的出生率,K是食饵的承载能力,q表示捕食者的捕获率,
为半饱和常数,
为捕食者的内在增长率,
为Allee效应常数,
表示捕食者
有其他食物来源,
表示Allee效应函数,这一项也被称为弱Allee效应 [4],
为Holling-II功能性反应函数 [5]。
1931年,美国生态学家W. C. Allee提出了一种生物学现象,即Allee效应。它是指种群密度较低的情况,种群平均增长率与种群密度呈正相关关系。在捕食–食饵模型中,Allee效应可能发生在食饵种群、捕食者种群 [6] 或两个种群中。本文中,我们研究Allee效应对捕食者种群的影响。
众所周知,在自然界中,捕食者物种往往把许多物种作为食物来源,这样,如果一种资源稀缺,它可能需要其他食物资源来维持其生命。这样,学者 [7] [8] 就提出了捕食者具有其他食物来源的捕食–食饵系统,并分析了其动力学行为。
所以同时考虑Allee效应和捕食者有其他食物来源对Leslie-Gower捕食食饵模型的动力学性质的影响,我们提出了捕食者具有Allee效应和其他食物来源的Leslie-Gower捕食食饵系统(1)。接下来,我们分析模型(2)的稳定性,并与捕食者没有其他食物来源的系统做比较。
为了计算简便,我们对模型(1)做如下的无量纲变换:
并用
分别代替
,模型(1)变为如下的新系统:
(2)
其中
和所有参数都是正常。
2. 平衡点的存在性和稳定性
容易知道系统(2)总是存在三个边界平衡点
,
,
。下面给出其稳定性。
定理2.1
是不稳定的;
是一个鞍点;当
时,
是不稳定的;当
时,
是稳定的。
证明:系统(2)在平衡点
和
的Jacobian矩阵分别为
可以看出矩阵
的两个特征值为
,
,因此
是一个不稳定的结点;矩阵
的两个特征值为
,
,因此
是一个鞍点。
另外,系统(2)在平衡点
的Jacobian矩阵为
矩阵
的两个特征值为
,
,当
时,
,
是不稳定的;当
时,
,
是稳定的。
定理2.1证毕。
接下来,我们分析系统(2)的正平衡点的情况。由系统(2)可知,正平衡点满足以下方程
(3)
由方程(3)的第二个式子可以得到
。将
代入方程(3)第一个式子得到
(4)
其中
和
。方程(4)的判别式为:
令
下面分析正平衡点的存在性。当
时,即
,方程(4)有一个正根
。当
时,即
和
,如果
,方程(4)有两个正根
和
;如果
,方程(4)没有正根。当
(即
)或者
(即
)时,如果
,方程(4)有一个正根
;如果
,方程(4)没有正根;当
时,即
,方程(4)没有根。并且有
。所以系统(2)的正平衡点有如下定理。
定理2.2
1) 当
或者
且
成立时,则系统(2)有一个正平衡点
。
2) 当
和
成立时,则系统(2)有两个正平衡点
和
。
3) 当
和
成立时,则系统(2)有一个正平衡点
。
4) 当
成立时,则系统(2)没有正平衡点。
下面分析正平衡点的稳定性。首先令
和
定理2.3当
和
成立时,则系统(2)的正平衡点
是鞍点。
证明:系统(2)在正平衡点
的Jacobian矩阵为:
其中
。通过计算有
由方程(4)有
,即有
,代入上式,可得
显而易见,
是一个鞍点。
定理2.3证毕。
定理2.4当
或者
且
成立时,则系统(2)的正平衡点
有如下性质:
1) 当
时,
是一个稳定的双曲结点或焦点。
2) 当
时,
是一个不稳定的双曲结点或焦点。
3) 当
时,
是一个细焦点或中心。
证明:系统(2)在平衡点
的Jacobian矩阵为:
其中
。通过简单的计算,得到
由方程(4)有
,即有
,代入上式有
下面计算有
当
时,有
,即
是一个稳定的双曲结点或焦点;当
时,有
,即
是一个不稳定的双曲结点或焦点;当
时,有
,即
是一个细焦点或中心。
定理2.4证毕。
定理2.5当
和
成立时,则系统(2)有一个正平衡点
,而且:
1) 当
,
是吸引的鞍结点。
2) 当
时,
是排斥的鞍结点。
证明:系统(2)在平衡点
的Jacobian矩阵为:
其中
。通过简单的计算,得到
类似上面的分析,有
通过计算有
接下来,只需要判断
的符号。首先做变换
,将平衡点
移动到原点,系统(2)变为:
(5)
其中
且
,
是关于
在原点附近次数不低于3的解析函数。
然后,我们做另一个变换:
则系统(5)变为:
其中
且
,
是关于
在原点附近次数不低于3的解析函数。
经过计算,
的系数为:
由
可以推出
,则
。由定理7.1 [9],平衡点
是一个鞍结点。当
时,则
,即
是吸引的鞍结点;当
时,则
,即
是排斥的鞍结点。定理2.5证毕。
由定理2.2得到若
成立,当
时,则系统(2)有两个正平衡点
和
。当
时,则系统(2)有一个正平衡点
。当
时,则系统(2)没有正平衡点。所以,系统(2)在
会发生鞍结分支,则有:
注2.1 若
成立,系统(2)在正平衡点
会发生鞍结分支,分支参数为
。
由定理2.3有,当
和
成立时,则系统(2)有两个正平衡点
和
,且
是一个鞍点。当
时,
是一个细焦点或中心,此时,
和
,所以,正平衡点
的Jacobian矩阵的特征值是一对纯虚根。另外,通过简单的计算可知
即满足Hopf分支横截性条件。综上所述,系统(2)在正平衡点
附近发生Hopf分支且
作为分支参数。
3. 数值模拟
例3.1 系统(2)中取
,
,
,则令
,此时满足
下面令
,即
,满足定理2.5条件,则正平衡点
是吸引的鞍结点(见图1)。令
,即
,满足定理2.5条件,则正平衡点
是排斥的鞍结点(见图2)。
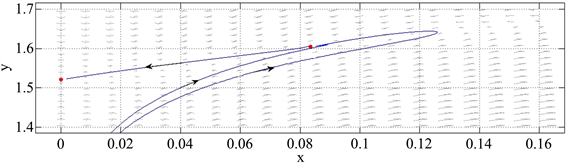
Figure 1. Positive equilibrium E3 is a saddle-node
图1. 正平衡点E3是鞍结点

Figure 2. Positive equilibrium E3 is a saddle-node
图2. 正平衡点E3是鞍结点
例3.2 系统(2)中取
,
,
,则令
,
此时满足
令
,根据定理2.4,可知系统(2)的正平衡点
是不稳定,同时在
的邻域内产生超临界的Hopf分支且在
附近出现一个极限环(见图3)。
当
(其它参数保持不变),也就是系统(2)不考虑其它食物来源时,系统只有唯一的正平衡点
,图4表示这个正平衡点是全局渐近稳定的。所以如果考虑其它食物来源(如图1),会导致系统的动力学性质变得复杂,出现两个正平衡,其中一个正平衡点是鞍点,另一个正平衡点是不稳定的,而且会产生极限环。
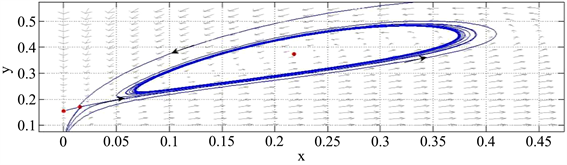
Figure 3. There exist a stable limit cycle around E2
图3. 正平衡点E2附近出现了一个稳定的极限环

Figure 4. Positive equilibrium is stable
图4. 正平衡点是稳定的
4. 结论
本文中,我们分析了捕食者具有Allee效应和其他食物来源的Leslie-Gower捕食–食饵系统的动力学行为。由定理2.1和2.2可知,平衡点的存在和Allee效应参数
无关,同时注意
随着
的增大而增大。所以由定理2.3和2.4可知,保持其它参数不变,只增大Allee效应,会使得正平衡点
从稳定变成不稳定,也就是较大的Allee效应会破坏系统(2)的稳定性。同时我们的研究也表明,与捕食者没有其他食物来源(即
时比较),系统只有一个边界平衡点和一个正平衡点。而当捕食者具有其他食物来源,(即
时),系统的动力学行为变得更加复杂,此时发现系统(2)有三个边界平衡点和两个正平衡点,其中正平衡点
是鞍点,正平衡点
可能稳定或不稳定,并且系统(2)可能会产生Hopf分支和出现极限环,也就是捕食者具有其他食物来源可能会破坏系统的稳定性。当只有一个正平衡点
时,这个正平衡点是鞍结点,同时系统(2)也会经历鞍结分支。