1. 概述
新一代BroadR-Reach芯片集成物理层,为集中式车载网络实现业经验证的性能、合规性和安全性 [1]。由于有线以太网布线简单可靠,非常适合通过音视频广播(AVB)桥接协议用在汽车部署中,AVnu联盟的主要市场焦点是成功将AVB部署在汽车空间的流媒体音视频应用中 [2]。车载以太网技术优势明显,在布线简单的基础上,只需要一对非屏蔽的双绞线就可以实现百兆带宽,基于此技术不但可以降低车身线束质量,还可以提高视频传输质量,其经济优异性显而易见。2008年宝马(BMW)作为第一个在车型上尝试搭载以太网的汽车厂商,宣布车载以太网进入了局部网络阶段,到了2013年,宝马正式宣布旗下最新车型X5搭载了车载以太网技术,并且开创了只使用一对非屏蔽双绞线的以太网物理层设计 [3]。国外其他的主流主机厂开始追随其路线,进行产品升级换代。本项目就是基于全球大众MEB新架构、新平台而研发设计并量产的360˚环视系统,基于车载以太网与整车的车机导航进行视频传输的。关于目前国内整车市场使用的环视系统,老一代产品使用的是复合同步视频广播信号(CVBS)技术,缺点是模拟信号输入输出,整体像素偏低。随着驾驶品质的提高,高清摄像头的要求在所难免,目前主流的高清视频均通过一对带屏蔽电缆的LVDS线束进行传输。LVDS是一种低电压差分信号,有着低功耗、低误码率、低辐射都诸多优点,使其在汽车应用上特别广泛。因为支持LVDS通讯的线束需要加屏蔽层,所以随着通讯距离增长,线束成本会急速增加。而支持车载以太网通讯的线束不需要屏蔽层,其成本增加微乎其微,所以当车载以太网技术问世后,使用以太网通讯的产品逐渐增多,价格优势会推动汽车行业在架构设计上考虑使用以太网技术。大众集团MEB平台是针对新能源设计的新一代平台化汽车,其整合的网关拓扑可以接收车载以太网,和其他控制器进行混接。
本文介绍的环视系统是在全球项目的国产化产品,全新的控制器搭载基于车载以太网的130万像素的摄像头,可以最大实现200万的视频输出像素。采用TI芯片对采集到的视频进行算法拼接处理,可以实现无缝拼接,低延迟的高清视频输出。如图1所示,为一个控制器搭配前后左右四个车载以太网摄像头的示意图。
控制单元和摄像头视频通信唯一性是基于IEEE提出的本地MAC地址标准实现的 [4]。每次系统上电,通过硬线连接,控制器知晓摄像头所处的位置,然后通过读取MAC地址识别图像采集的区域。本系统的后续扩展方案包括了使用智能摄像头代替前后两个摄像头。自动紧急制动系统(Autonomous Emergency Braking System, AEB) [5] 是一种高级辅助驾驶系统(Advanced Driving Assistant System, ADAS),它可实现车辆避撞和行人避撞,提高车辆的主动安全性 [6]。

Figure 1. Surround view system schematic
图1. 环视系统示意图
2. 控制方案
2.1. 供电和唤醒原理
控制单元(Topview ECU)通过主连接器和车身相连,本产品选择TE 20针脚的连接器,供电来自车身KL30 (12 V)。由于控制器内部地和车身外部地通过螺丝金属件可以互联,需要考虑不同地因素,所以在设计上要加入过滤器件,防止相互干扰。四个摄像头的供电需要通过控制单元的主连接器给出,如果前后摄像头是隐藏在logo内,本系统预留出logo翻转信号(PWM)。主控制单元通过CAN信号与车身进行沟通,比如车身的休眠唤醒,以及摄像头脏污检测,摄像头清洗等信号均通过CAN信号进行传输。系统连接如下图2所示,红色为电源线,带箭头的黑色线为视频或者信号传输线。
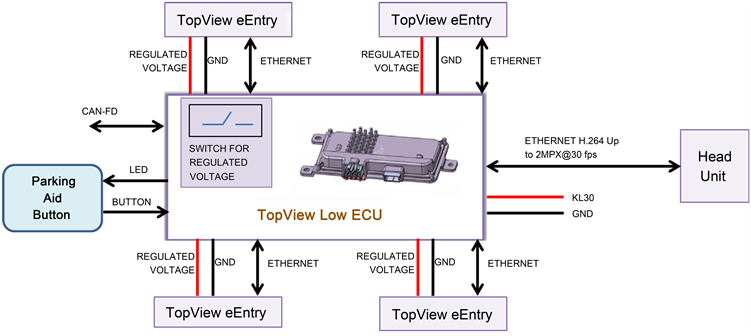
Figure 2. System architecture schematic
图2. 系统架构示意图
车身KL15信号CAN FD传送到控制单元进入到控制单元进行唤醒或者休眠,通过内部程序逻辑控制,实现不同模式的切换。对摄像头的接口端需要考虑摄像头的功率和对应的诊断,包括硬线连接状态,视频传输状态等,如图3和图4所示。
2.2. 视频采集和输出实现
环视控制单元(Topview ECU)外接四路以太网摄像头(Topview eEntry),输出一路以太网视频信号到整车。环视系统控制器的SOC采用TI芯片家族的TDA2Ex系列芯片,为智能辅助驾驶(ADAS)设计的一款家族产品 [7],其H.264编码方式的应用可以完美的为车载以太网视频传输提供硬件支持,内部带有3D图像处理功能的GPU可以提高视频和图片质量处理能力。搭载博通的BCM89541物理层以太网芯片,很好的搭载四路以太网摄像头视频输入,一路以太网视频输出,具体输出到网关还是直接输出到中控导航,按照不同的车型,有着不同的配置。下图5是两个核心芯片的链接图,通过全双工协议串行外设接口(SPI)进行通信。
2.3. 摄像头程序更新原理
在设计之初考虑到摄像头的软件更新,可以通过以太网进行刷新,如下图6所示,以太网传输命令控制主控制器(Host),可以是电脑,也可以是环视控制器,使能Host发送指令到摄像头。这部分的协议是基于摄像头内部的安森美芯片的用户数据包协议(UDP-Based)执行的。可以通过对应的命令改变摄像头内部的参数达到程序更新的目的,比如使能自动白平衡(AWB)。此UDP协议包括UDP header,参考RFC768,IP header参考RFC791,Ethernet Header,参考IEEE 802.3,这里不作展开。
以下是Host和摄像头之间写和读的流程,如图7:
协议中会设定读取或者写入时间超时,或者反馈指令和要求指令不一致的应对策略,如下图8所示:
摄像头程序刷新流程如图9如下:
3. 控制系统实现
3.1. 系统组成
整车KL30 (12 V)电源通过车身和系统的连接器进行输入,系统的电源管理模块会分配出不同的电压(3.3 V、5 V等)给到内部的控制芯片使用。考虑到系统的功耗,在设计之初PCB内部放置了NTC温度传感器,通过对电阻电压的读取(通过模拟转数字口) Vadc,可以算出目前系统的温度(T),计算公式如下:
其中Beta = 3434 K
本产品采用德州仪器公司的TDA2Ex系列芯片,以下简称SoC,控制单元主要有两种信号流,一种为车载视频流,另一种和常见的CAN总线通信。车载视频流通过对四路130万像素的摄像头信号进行解码处理,通过图像拼接,畸变矫正,颜色还原等处理,可以最大输出200万像素的图像,由于系统输出亦基于车载以太网通讯,所以通过H.264编码,以RTP帧方式视频流输出。通过CAN总线,控制器可以发送或者接收车身控制单元给出的车速信号,车门信号,档位信号等。SoC要给与不同的图像处理,比如在交通路口,需要更多的视野;比如在倒车模式,需要对图形畸变处理等。SoC需要对CAN信号进行处理,实现和车身的互动,需要针对温度,电压进行实时检测,及时记录系统的工作状态,做好诊断工作。SoC的外围单元功能比较丰富包括各种频率的通信总线、GPIO/PWM、MDIO、MMC1、HDMI、UART等,以下简单列举通信数据使用的外围单元:
QSPI:SoC和闪存的数据沟通
SPI1:SoC和TCAN收发器通信
SPI2:SoC和BroadR-Reach进行通信
I2C1:SoC和电源管理芯片进行通信
RGMII0:SoC视频流传输
系统架构如图10如下所示:
3.2. 软件功能实现
本产品的软件是基于AutoSar4.x版本进行设计。考虑到软件的持续升级和客户后续更新需要,软件需要包括应用程序和在线刷新程序以及客户程序刷新(ORU)三部分,逻辑实现如下图11所示:
在线刷新程序需要先设定系统时钟,初始化DDR,上电输入输出(I/O),上电附属核心单元(Slave core),然后加载附属应用程序,整个时间在800 ms左右。其逻辑程序如下图12所示:
应用程序架构示意图如下图13所示:
应用程序需要实现整个控制器应用功能的开发,包括上层应用和基础软件模块。上层应用都是基于整车逻辑进行判断,涉及到各种模式的切换,可以参照下图14的逻辑:上电进行初始化,然后进入到正常工作模式,实时监控环视系统的状态,可以切换到安全模式,预睡眠模式,睡眠模式等。
控制器基础软件模块包括与整车的CAN FD通讯,其CAN FD命令流如图15所示。
软件控制示意图16如下:通过各种模式的切换,进行逻辑判断。比如在工厂组装模式,需要进入到工厂编程模式,当产线验证结束后要跳出工厂模式,进入到正常工作模式。通过车机或者挂对应的档位信号,进入到不同的视频选择,如环视,前视,后视等,进而视频信号通过车载以太网发出。
3.3. 环视系统车辆校准
车载环视系统在安装后,均需要进行校准才可以对图像进行完美的显示。我们主要对以下图17中的六个参数进行监测以判断车辆校准的准确性。参数分别是摄像头在车辆基准上的位置X、Y、Z、α、β、γ,前三个是摄像头的相对位置,后三个是摄像头的位置角度。位置误差保证在±50 mm,α误差在10˚以内,β、γ误差在6˚以内。
本系统的校准方法是遵循FMVS111的标准,如下图18所示,车辆在校准的时候需要严格按照标准进行。
实车校准和显示效果如下图19所示:
3.4. 功能验证实现
功能验证主要包括对整车信号的模拟仿真,不同模式的视频输出,图像的捕捉,图像质量的测定,以及各种条件下系统的稳定性测试。图20是针对本产品搭建的测试系统。
4. 结束语
基于以太网的环视系统目前在国内市场尚属首例,所以在量产的过程中遇到各种各样的问题,程序设计之初,考虑到软件升级的频繁性,已经完善了空中刷新(ORU)以及通过ECU对摄像头的刷新设计功能,所以通过软件升级的方式,解决了很多实际路试中遇到的问题。本系统目前应用在MQB37W以及新平台MEB全球100多种车型,包括Audi、Golf以及保时捷等各种车型,给社会带来了很大的经济效益,给用户带来了更多的高清体验。