1. 引言
为促进我国经济可持续发展及资源的合理运用,西电东送输电规模的大幅增长 [1],于是高压塔架、电线杆等拔地而起,同时随着交通的发展带来指示牌等,随着而来的便是大量的杆状物体,而这些需要人们进行攀爬检测维护或更换等,大量退耕还林中林木的修剪等,无一不涉及高空攀爬。在各行各业的维护中高空作业所带来的危险性远远大于地面作业的。为此,开展了很多杆状物体攀爬机器人的研究,高压塔架攀爬主要采用机械爪夹持和磁吸附原理进行设计 [2],电线杆的攀爬机器人采用仿生式和摩擦为主 [3] [4] [5]。目前国内普遍属于实验研究阶段,还没有达到大范围推广,有必要对国内研究现状进行总结。为我国后期新型攀爬机器人的研究和设计过程中提供理论参考和借鉴。
2. 研究现状
2.1. 杠杆原理攀爬器
利用杠杆原理制作成的攀爬器,借助人体的体重通过攀爬器与电线杆之间的摩擦以达到攀爬的目的,是国内使用最为普遍的电线杆攀爬器,在攀爬过程中只需要将脚蹬规定在脚上,在腰部围绕电线杆套一根安全绳。该结构仿滑性能具有一定的缺陷,在冰雪覆盖的情况下,摩擦不能达到要求,于是在2019年齐齐哈尔大学制作了一种新型攀爬器 [6],结构如图1通过在脚扣前后掌加锯齿以便于镶嵌入冰层中,这样可以起达到更好的防滑效果。
 (a) 攀爬器整体结构 (b) 脚套部分结构
(a) 攀爬器整体结构 (b) 脚套部分结构
Figure 1. Schematic diagram of the new climber structure
图1. 新型攀爬器结构示意图
2.2. 缠绕式攀爬机器人
缠绕式攀爬机器人最具有代表性的便是仿蛇缠绕式攀爬机器人,在杆件上进行攀爬,普遍对执行器和控制器的设计较为复杂。作为软体机器人,具有良好的灵活性、复杂环境适应性等,仿蛇攀爬机器人在搜救、探险、攀爬等很多方面都有着广泛运用。
苏州市职业大学研制的能够垂直缠绕攀爬蛇形机器人 [7],该机器人便是仿蛇形研制,拥有24个万向关节构成,以确保其运动灵活性,在缠绕攀爬(见图2)的实现过程中,以空间三连杆结构建立了蠕动步态模型,通过缠绕式攀爬根据圆柱体的大小和摩擦力决定其上升的转角大小。
西南科技大学研制一款通过仿蛇软体缠绕攀爬机器人 [8],该仿蛇机器人主要包含软体缠绕执行器和伸缩执行器构成(见图3),在仿蛇头部和尾部用缠绕执行器在充入一定气压时实现缠绕,在仿蛇身体部分用伸缩执行器通过管内气压的变化进行伸缩,交替缠绕伸缩实现杆的攀爬。

Figure 3. Prototype of snake-like soft climbing robot
图3. 仿蛇软体攀爬机器人样机
2.3. 环抱式攀爬机器人
环抱式攀爬机器人主要运用柱体于较于平整,在攀爬的过程中没有分支,或者分支不影响该机器人的正常工作,环抱式柱体攀爬机器人相比较其他形式柱体攀爬机器人可以承受负载较高。
北京航空航天大学研制了一款轮式攀爬机器人 [9],由攀爬和锁杆两关键结构组成,首先对设计进行静力学分析,在进行Solidworks进行建模(见图4),最后进行样机的制作和测试优化,可实现在不同直径下工作,在负重20 kg的条件下,速度4.24 m/s。
山东建筑大学研制了一种仿蠕虫爬行设计的负重攀爬机器人 [10],该攀爬机器人主要由加紧结构和升降结构共同实现树木的攀爬(见图5),在检测到树木时通过旋转角度进行攀爬,采用自适应夹紧机构拥有良好的攀爬性,在攀爬的过程中下升降夹紧后升降装置上升,上升完成后上夹紧装置夹紧后下夹紧装置松开,后升降装置上升,循环往复完成攀爬。

Figure 4. Climbing robot prototype model
图4. 攀爬机器人样机模型

Figure 5. Prototype model of tree climbing robot
图5. 爬树机器人样机模型
华北科技学院研制了一种全向移动攀爬机器人 [11] 和新型三轮全向移动攀爬机器人 [12],该攀爬机器人设计采用两个主动轮一个从动轮的攀爬方式(见图6),保证动力的同时又提升了该机器人的负重能力,利用摩擦实现攀爬,利用四个塑料瓶储存气源为气动提供能量伸缩气缸实现立柱的夹紧。
东莞理工学院研制了一款应用与柱体的攀爬机器人 [13],该设计以轮子作为传动,综合运用电推杆和连杆的组合运用合理的进行不同大小柱体进行调节(见图7),形成杠杆原理实现机器人的抱紧功能,在实践及仿真验证中具有可行性。
速生林修剪机器人是运用较为成熟的环抱式攀爬机器人,山东农业大学设计了一种速生林高效爬树修枝机器人 [14],该设计主要由攀爬机构、修枝机构、动力系统和控制系统四个部分组成(见图8),攀爬机构由四个驱动轮和四个夹紧轮以一定角度布置,同时利用摆动梁调整爬升轮的工作位置,提高攀爬、越障以及对不同直径树木的适应性。该设计主要用于速生林侧枝的修剪,环抱性设计侧枝需要保留时无法实现攀爬。

Figure 6. Force analysis diagram of omnidirectional mobile (left) climbing robot prototype model (right)
图6. 全向移动攀爬机器人样机模型(左)受力分析图(右)
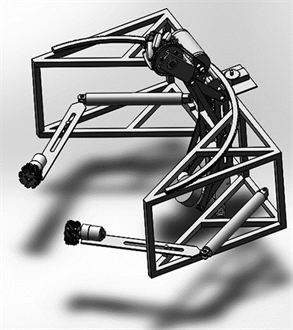
Figure 7. Structure diagram of cylinder climbing robot
图7. 柱体攀爬机器人结构示意图

Figure 8. Prototype assembly drawing of tree climbing pruning machine
图8. 爬树剪枝机样机装配图
2.4. 夹持式攀爬机器人
夹持式攀爬机器人重要靠爪子部分完成杆的攀爬,该结构对爪子部分材料要求较高,负重能力相对较差。
中国石油大学胜利学院研制一款可实现越障的爬杆机器人 [15],该爬杆机器人主要靠三部分的夹紧装置和爬升装置相配合完成攀爬(见图9),利用蜗轮蜗杆减速器的自锁性能和丝杆等实现架夹紧的功能,通过步进电机和连杆的相互作用实现夹紧和松开。其攀爬方式为中部夹紧装置夹紧,爬升装置带动主体杆件上升后下夹紧装置夹紧,中部夹紧装置松弛后利用丝杆向上攀爬,实现杆的攀爬。
厦门工学院研制了一款拟人爬杆机器人 [16],该机器人采用拟人主要用于斜拉钢索监测与维修,主体有四个机械爪组成,通过模拟动物攀爬过程,其爪手左右各两幅(见图10),在攀爬过程中,在一边爪手抓紧后另外一边爪手向上或向下利用丝杆运动,循环往复实现攀爬的动作。
吉林大学研制来一种小型自翻转攀爬机器人 [17],该机器人由五连杆、四关节、二抓手组成,适用环境多样化,可夹持不同形状的杆,同时拥有良好的夹持能力,通过关节的翻转实现攀爬(见图11)。
在广东工业大学的仿生与智能机器人实验室(BIRL)开发了一种双爪式攀爬机器人 [18] [19],该设计由回转关节、摆转关节、夹持器三个模块构成(见图12),攀爬时依次依靠两端的夹持器交替抓夹杆件,夹持器采用三级传动方式,不断“换手”,实现攀爬运动。
西安交通大学设计一种新型气动攀爬机器人 [20],该设计将爬杆机器人和地面移动机器人融合在一起(见图13),移动轮采用双粉臂式独立悬挂,从而适应野外不同环境,上下爪手在提升机构的作用下实现攀升。

Figure 9. Obstacle climbing robot model
图9. 越障爬杆机器人模型

Figure 10. Structure model of anthropomorphic pole climbing robot
图10. 拟人爬杆机器人结构模型
2.5. 桁架攀爬机器人
在电力输送的过程中伴随着高压桁架的建立,在铁塔高空作业中危险性极高,高空作业时人工攀爬过高容易产生疲劳,安全带换位等等容易发生事故。在桁架攀爬机器人的设计中大多采用机械爪夹持和磁吸附原理进行设计,仿生桁架攀爬机器人主要以仿尺蠖结构设计。
山东建筑大学研制了一款铁塔攀爬机器人夹持结构的设计 [21],该结构为V型角钢夹持,主要由夹持爪、外展机构和顶出机构构成(见图14),工作时要避免与塔架脚钉等发生干涉,需要控制上升长度同时机器人机体要与攀爬角钢保持平行,在攀爬的过程中两夹持结构交替夹紧角钢进行攀爬。
内蒙古民族大学研制了一种仿尺蠖运动的高压塔架攀爬机器人 [22],该攀爬机器人采用仿尺蠖运动设计,主要由抓卡机构、推杆等构成(见图15),在攀爬的过程中头部抓卡结构打开,推杆推动前移后,通部抓卡机构抓紧,尾部放松同时推杆回收,实现向前运动后尾部抓卡机构抓紧,往复运动实现攀爬。西南交通大学也根据尺蠖运动进行设计设计了一款角钢塔攀爬机器人 [23]。
哈尔滨工业大学设计了一款输电线电力铁塔攀爬机器人 [24],充分利用电力铁塔由角钢构成采用磁吸附原理进行设计,电磁铁紧密贴合在角钢两侧,总质量3.1 kg,收缩时总高度为255 mm,完全伸长为450 mm,攀爬较为稳定,但攀爬越障能力不足。

Figure 14. Three-dimensional model of transmission tower climbing robot
图14. 输电铁塔攀爬机器人三维模型

Figure 15. Three-dimensional model of climbing robot resembling inchworm
图15. 仿尺蠖攀爬机器人三维模型
3. 关键技术
3.1. 结构设计
在攀爬机器人的研究中,结构是机器人研制的基础,根据现有的爬杆机器人其主要攀爬结构上主要分为环抱式、缠绕式、夹持式等,其中环抱式攀爬机器人在林业修剪 [25] [26] 方面较为成熟。其各种攀爬结构适用环境优缺点见表1。

Table 1. Analysis of different structures of climbing robot
表1. 攀爬机器人不同结构分析
3.2. 可靠性分析
安全可靠性是一个设计的必须要考虑的事,能够稳定运行并且准确完成预定任务,在应对突然事物时反应的能力,在发生故障时,机器人的安全防护措施。首先是机械结构的可靠性,在设计的过程中充分考虑材料的刚度和强度问题,预防因为机械设计过程中材料强度等可控因素导致机械的失效,连接等配合是否达到设计要求。在发生意外事故时设备的主动防护系统,利用电动机等进行动力输出,加大与攀爬物之间的摩擦等;被动防护系统,主动失效时手动控制等。
3.3. 智能化分析
智能化是机器发展成熟的表现,在不同环境中具有较强的适应能力,对事件的自我识别处理。合理的运用传感器等及时调整机械的越障、夹持力度大小等,减少对攀爬物所带去的伤害,同时攀爬机器人智能化,在无人操作过程中路径的规划、信息的处理、越障等自我规划与完成,在设计过程中向控制反应快速、适应性强等使得机器人设计智能化程度度更高的关键。
4. 发展趋势
4.1. 智能化发展
在未来攀爬机器人的设计研究中,逐渐向智能化发展,在实际使用中环境复杂多变,充分利用不同传感器的特征进行融合处理,实现多种传感器之间信息的处理,实现功能的互补,机器人进行自我识别与判断,反应灵敏度等进一步提高,未知环境中获取更多的信息,在攀爬过程中可以更快更准确等完成指令。同时建立合理的检测平台,将操作人员与机器人之间进行信息交换,操作人员可以掌控机器人工作时的位置及承受分析,机器人通过图像和传感器等获取分析信息及时调整机器人的运动状态,顺利完成攀爬任务。
4.2. 速度和准确性
攀爬机器人攀爬能够快速、准确完成预定工作是一项重大优势,工作环境复杂,攀爬速度慢是现有攀爬机器人普遍存在的技术性难题。速度是考验机器人对各方面的协调能力的一项重要指标,要充分利用机械和软件等综合系统的设计,使得各构件之间运动更加协调,解决攀爬速度慢、准确度低等问题。
4.3. 总体设计与负载能力
目前攀爬机器人部分质量较大不便携带,同时对能源的供应要求较高,在攀爬时容易出现能源供应不足失去动力等造成安全隐患。此外,攀爬机器人还需要具备较好承载能力,合理的设计重心各部分合理的受力,可大幅度降低攀爬物自身的要求。减轻整体质量、便携式、能源供应和负载能力等是未来攀爬机器人重要的研究方向。
5. 总结
攀爬机器人可代替人们完成很多高风险的工作,可以大大降低在攀爬过程中由于操作失误、攀爬疲劳等导致事故的发生率,在我国电网的领域中攀爬机器人更是显得尤为重要。我国在爬杆机器人的研究设计中,虽然取得了一定成果,但是在实际运用中还是需要很大的改进,实验时场所过于特定化,现实使用中环境复杂,还需要相关研究人员做出更多的改进设计。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019] 1152号);国家级大学生创新创业训练计划项目(202014440013)。