1. 引言
在部队打靶训练和炮弹科研靶试时,需要对舰炮的末端效能进行综合评估,内容包括偏靶距离、偏靶方向、杀伤概率、着弹点分布情况等。目前,舰炮对海上/陆岸目标的打击精度的评定的主要手段是光测 [1],通过光学比例尺法测量爆炸点与靶心之间的距离,该方法需人工干预,测量误差大,且容易受爆炸产生的沙尘和不良天气的影响。因此,设计一种实时客观、不受天气影响、抗干扰能力强、测量精度高的二维矢量脱靶量测量雷达系统,具有良好的应用背景和实际需求。
本文针对舰炮强海杂波环境下,目标RCS(雷达反射截面积)小、速度快、射速高、多目标的特点,设计了一种结合LFMCW和一维相控阵雷达体制的脱靶量测量系统。系统装载于拖船船尾,利用相控阵雷达的波束无惯性捷变优势,对以靶船为中心,±45˚度范围内的海平面进行连续高速扫描,当炮弹进入检测区域,雷达对其距离和方位进行多次连续测量,并建立航迹,与此同时,雷达对靶安装在船上的信标进行准确定位,测量靶船的距离和方向。最后通过坐标变换,解算每一发炮弹相对于靶船的偏靶距离和偏靶方向,并实时给出其速度、射击方向、射击时间等信息。
2. 雷达系统设计
2.1. 脱靶量测量原理
在舰炮对海打靶训练时,打击目标一般为拖曳式靶船,由一艏拖船牵引前进,炮弹的落点散布在以靶船为中心的一定区域,为了保证拖船在安全范围外,靶船与拖船之间留有足够的安全距离。因此雷达安装在拖船上而不是靶船上,保证了设备的安全,且降低了使用成本 [2] [3] [4]。如图1所示,雷达安装在拖船尾部,利用一维相扫方式,对以拖船轴线为中心±45˚区域海平面进行高速连续扫描 [5]。由于是软质缆绳,行进过程中,靶船基本在拖船轴线上,因此雷达能对靶船周围区域进行连续监视。
当炮弹进入雷达监视区域,雷达自动对其相对于雷达的距离和方位进行测量,同时测量安装在靶船上信标的距离和方位,然后通过式2-1坐标变化,将炮弹相对于雷达的距离和方位转换为相对于靶船的距离和方位,并结算炮弹落点的偏靶距离和偏靶方向。
(2-1)
其中
为炮弹相对于靶心的距离和方位,
为炮弹相对于雷达的距离和方位,
为拖船相对于雷达的距离和方位。

Figure 1. One dimensional phase sweep scanning mode
图1. 一维相扫扫描方式
2.2. 总体电路设计及工作原理
舰炮矢量脱靶量测量系统由频综、发射机、收/发天馈线阵列、发射/接收(T/R)组件阵列,波控、接收机、信号处理、数据处理、通信控制、综合显控终端、电源等12大部分组成,由于采用连续波体制,为了保证收发之间的隔离度,发射天线和接收天线之间距离要大于0.5 m [6]。雷达系统组成及工作原理示意图如图2所示。
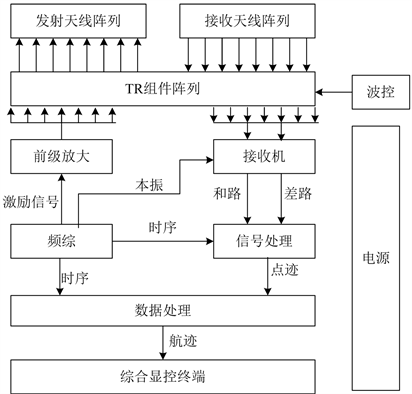
Figure 2. System composition and working principle block diagram
图2. 系统组成及工作原理框图
频综为整个系统提供激励信号、本振信号、时钟和时序等。激励信号经前级放大和功分网络送入多路发射(T)组件,T组件的功能为将激励信号进行放大和移相,然后送入发射天线阵列,发射天线阵列将激励信号转换为电磁波信号向空间辐射,电磁波信号遇到目标将一部分能量反射到雷达接收天线阵列,接收天线将电磁波信号转化为电信号送入接收(R)组件阵列,R组件将接收到的目标回波信号进行放大和移相,然后送入功分网络和和差器,在功分网络和和差器生成和、差两路信号。然后在接收机中混频、放大、滤波后送入信号处理机,信号处理完成目标检测及距离和方位测量,生成目标点迹送入数据处理机生成连续可靠航迹。波控全称为波束控制器,其主要功能为通过控制T/R组件的移相值,以达到控制天线波束指向的目标,通过快速改变移相值,使雷达波束对±45˚的空域内进行高速连续扫描。由于采用相控阵体制,雷达对整个空域扫描的周期£20 ms。综合显控终端提取目标航迹进行显示和计算脱靶量,并对雷达进行控制和参数设置 [4] [7]。
2.3. 总体结构设计
舰炮矢量脱靶量测量系统机构主要由接收天线、发射天线、电子组合三部分组成。考虑到保障性和维修性,三部分分别设计为独立的模块,为了提高收发天线隔离度,发射天线和接收天线分布在电子组合两侧,拉开收发天线之间的距离,电气部分通过电缆连接。结构组成如图3所示。
2.4. 雷达主要技术指标及参数设计
根据拖船离靶船的距离以及炮弹落点的分布范围,为了保证一定的威力余量和信噪比,雷达最大作用距离设计为1500 m。方位扫描范围设计为±45˚,单个收发天线即可覆盖,既能保证足够的覆盖范围,又降低了相控阵雷达的设计难度。
雷达测距精度主要由系统带宽决定 [8],由雷达原理可知,LFMCW雷达测量固有误差与系统调制带宽关系如式2-2所示。
(2-2)
其中c为光速,B为系统调制带宽。系统测距精度要求<3 m,则调制带宽B必须³50 MHz。同时考虑还有其他测距误差的存在,取B = 100 MHz。
落点的定位精度是由距离测量精度和方位测量精度综合决定的,落点定位的误差单元如图4所示。

Figure 4. The error element diagram of the location of the landing point
图4. 落点定位的误差单元图
误差单元的径向误差即距离误差为
,测角误差
引起横向误差可表示为
,其中R即为误差单元离雷达的距离,系统测距误差为£3 m,因此测角精度设计为£0.2˚ (0.0035 ral),它在1000 m处的横向误差为3.5 m,与径向误差基本匹配。而方位测量误差主要由方位波宽和目标回波信号信噪比决定。目前,和差测角体制的角度测量的均方误差一般能做到波宽的1/10到1/20之间,故本系统方位波宽选择为2˚,俯仰采用宽波束覆盖。系统主要设计参数见表1。

Table 1. The main performance indexes and parameters of the system
表1. 系统的主要性能指标及参数
3. 试验验证
某一轮射击的检测界面如图5、图6所示。试验结果表明,舰炮矢量脱靶量测量系统能对炮弹末端航迹进行可靠检测和建航,并对其落点进行定位并计算相对于靶船的偏靶距离和偏靶方向。实验结果表
明,该系统对炮弹落点的定位精度£3 m (圆误差),不但从根本上解决光学落点定位系统受天气和烟尘影响,且需要人工干预的缺点,而且定位精度提高了3~5倍。该系统实时客观、稳定可靠、高可信度,满足舰炮矢量脱靶量测量需求,使用效果良好。