1. 引言
随着工业4.0的迫近,众多智能化机器人产品如雨后春笋般诞生,智能快递机器人基础理论也被世人提出,为快递领域又添一份生机。智能快递机器人系统的研究改变了人们的传统认知,可以想象得出,随着计算机技术、电气技术、控制技术等新的突破与微机的普及,如果能够实现快递智能化并能推广开来,将给人类生活带来天翻地覆的变化 [1] [2] 。随着快递市场竞争越来越激烈,谁能出奇制胜谁就能取得最大的经济效益。快递产行的兴旺发达,就必须依靠创新,从科技创新角度和自动智能角度开发智能快递机器人,使竞争力不断提升,是帮助企业可以在众多行业中脱颖而出 [3] 。基于上述分析,文以STC89C52RC单片机为控制核心并基于红外对管、步进电机和供电模块等外设单元设计并完成了基于51单片机的智能快递机器人控制系统。这对于提升快递行业的竞争力,促进企业可持续发展具有一定的借鉴意义。
2. 系统总体设计
本本所设计的智能快递机器人控制系统主要由硬件及软件两个部分组成,其总体方案框图 [4] ,如图1所示。其中,硬件部分由主控制模块、步进电机及其驱动模块、红外对管模块及电源模块组成;软件部分由红外寻迹程序和机械臂动作程序。
3. 硬件系统设计
本文通过Altium designer13软件来完成智能快递机器人控制系统硬件系统的电路设计,其具体设计如下所述:
3.1. 主控模块电路设计
主控制模块选用编程简单、价格低廉的STC89C52RC的最小系统,其具体原理图如图2所示。

Figure 1. The overall design block diagram of the control system
图1. 控制系统总体设计方框图
3.2. 步进电机与驱动电路设计
步进电机是将电脉冲信号转变为角位移的开环控制元件,它的转速频率只受电脉冲信号控制的,所以用上L293D作为驱动模块控制步进电机。L293D的VCC管脚接电源正极,VCC2接入7.4 V的电压,四个GND管脚接地,OUT1、OUT2和OUT3、OUT4分别接入左右步进电机,使能端EN1、2分别接1 K的电阻再接到P1.4与P1.5,输入端IN1、IN2、IN3、IN4分别接到排针的P1.2、P1.3、P1.6、P1.7,其电路原理图如图3所示。
3.3. 红外循迹模块电路设计
红外循迹模块作为本控制系统中最复杂的模块,其中包含了红外对管,即红外线发射管和光敏接收管或者是红外线接收头配合在一起的使用的总称。红外寻迹模块还包括了运算放大器LM324,可工作在单电源下,电压范围是3.0 V~32 V,其电路原理图如图4所示 [5] [6] [7] 。
3.4. 电源模块设计
本文所涉及控制系统中采用的经典的7805芯片稳压输出电压 [8] 。7805的OUT3号管脚分别接上熔断器和电容,GND端直接接地,IN端接入7.4 V电源和电容,其电路原理图如图5所示。
4. 系统软件设计
为实现智能快递机器人的自动寻迹及投掷功能,本文控制系统软件系统主要由红外寻迹程序和投掷动作程序组成。
4.1. 红外寻迹程序
控制系统主要利用对不同颜色的障碍物对红外光的反射能力不同实现红外寻迹功能 [9] [10] ,其程序流程如图6所示。当寻迹模块在黒线上的时候黄色指示灯灭,当寻迹模块不在黒线上的时候黄指示灯亮。当偏离到黒线的左边时,左边的模块黄色指示灯亮,右边的指示灯灭。同理,当偏离到黑线右边时,右边的模块黄色指示灯亮,左边的指示灯灭。红外循迹工作的部分程序如图7所示。
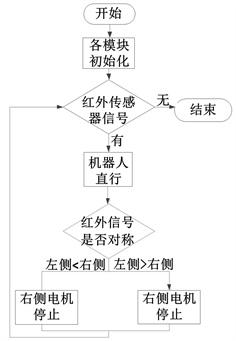
Figure 6. Infrared tracking program block diagram
图6. 红外寻迹程序框图

Figure 7. Procedure diagram of infrared tracking part
图7. 红外寻迹部分程序图
4.2. 投掷动作程序
投掷动作程序主要在红外寻迹程序完成寻迹功能后,即智能快递到达指定投递地点后,通过控制电机转动实现投掷功能,其程序框图如图8所示。
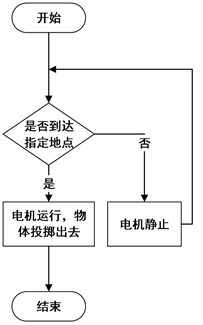
Figure 8. Flow chart of throwing action program
图8. 投掷动作程序框图
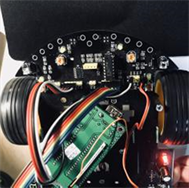
5. 系统实物测试
为进一步测试控制系统的工作性能,本文通过硬件焊接及软件编程实现智能快递机器人的实物制作,并对其性能进行测试。
5.1. 红外寻迹测试
(1) 启动测试
智能快递机器人左右都识别黑线信号,通过控制前行程序,使得左右两侧电机同步转动,小车前行,效果图如图9(a)所示。
(2) 左转测试
智能快递机器人只有左侧识别到黑线信号,通过控制左转程序,使得右侧步进电机继续运行,左侧电机停止,效果图如图9(b)所示。
(3). 右转测试
智能快递机器人只有右侧识别到黑线信号,通过控制右转程序实现,左侧步进电机继续运行,右侧电机停止,效果图如图9(c)所示。
(4) 停止测试
智能快递机器人左右都未识别到黑线信号,通过控制小车停止程序,使得左右两侧电机都停止运行,小车立即停止,效果图如图9(d)所示 [11] 。
5.2. 投掷动作测试
为了使智能快递机器人到达送货点后,舵机做成的简易机械臂可以动作,能让物品投掷下去,具体测试效果如图10所示。
 (a)
(a)  (b)
(b)  (c)
(c)  (d)
(d)
Figure 9. Infrared tracking test effect diagram of intelligent express robot. (a) Start-up, (b) Turn left, (c) Turn right, (d) stop graph
图9. 智能快递机器人红外寻迹测试效果图。(a) 启动图,(b) 左转图,(c) 右转图,(d) 停止图
 (a)
(a)  (b)
(b)
Figure 10. Control effect diagram of steering gear. (a) Rotate 0 degrees, (b) Rotate 90 degrees
图10. 舵机控制效果图。(a) 旋转0度,(b) 旋转90度
通过对智能快递机器人红外寻迹功能的测试,本文所设计控制系统可以较完美的实现智能机器人的启动、左转、右转、停止操作及简易机械臂投掷舵机的角度控制,从而具有红外寻迹及投掷功能,具备一定的应用价值。
6. 结论
随着科技和经济的发展和人们生活水平的提高,快递行业已经发展成为国民经济和人类社会中不可或缺的一部分。为节约快递行业的人力物力、提高行业整体的经济效益,本文设计并完成了具有红外寻迹及投掷动作功能的基于51单片机的智能快递机器人控制系统。本文所述控制系统主要由硬件系统及软件部分组成。其中,硬件系统主要包括STC89C52RC单片机,最小系统为控制模块、红外对管、步进电机及其驱动和供电模块等几部分组成,并通过Altium designer13软件完成各个模块的电气原理图设计;为实现智能快递机器人的红外寻迹及投掷动作功能,软件部分主要由红外寻迹程序和投掷动作程序组成。进而,构建智能快递机器人实物对本文所设计控制系统进行性能测试。性能测试结果显示:本文所设计智能快递机器人控制系统可以较完美实现启动、左转、右转、停止操作及简易机械臂投掷舵机的角度控制,从而具有红外寻迹及投掷功能,具备一定的应用价值。