1. 引言
对非线性微分方程的研究,比线性微分方程的研究难度大得多,大多只能依靠数值解法。数学家们提出反散射法、达布变换法,tanh、雅可比函数展开法等构造性解法,是非线性偏微分方程研究的福音。目前已知的非线性偏微分方程,大约只有3000多种,而有名的,也不过一百多种。多以发现它们的学者名字命名,例如,LAX可积系统下的有:BBM方程、Belousov-Zhabotinsky方程、本杰明–小野方程、Bogoyavlenski-Konoplechenko方程、波恩–英菲尔德方程、Boussinesq方程、博格斯方程、KdV方程、MKdV方程、五阶KdV方程、五阶色散KdV方程等。
关于KdV方程的研究,已有许多著名的结果,B. Dey研究精确的哈密顿密度和守恒定律,给出了方程的两个扭解 [1] [2] 。J. F. Zhang等人使用两种不一样的方法给出了方程的孤立波解和奇异波解,他们针对KdV和mKdV方程,提出了两种构造新的精确孤波解的方法,并且总结出12种类型的孤子解,归结为mKdV方程的孤子解 [3] [4] 。J. Yu采用齐次平衡法得到了一个扭解 [5] 。R. Grimshaw等人为方程研究了大幅度孤子 [6] 。E. G. Fan使用代数方法给出了方程的钟形孤立子、扭形孤立子和雅克比周期解 [7] ,继而改进了这个方法,又构造了一般非线性方程的一系列显式精确解 [8] 。M. Y. Tang运用动力系统分支法给方程研究了孤立波和它们的分支 [9] 。Y. Z. Peng用改进的隐射方法得到了一些包含双曲型函数的孤立波解、包含雅各比椭圆函数的周期波解和三角函数的周期波解 [10] 。刘正荣将研究微分方程数值解的基本方法编撰在 [11] 中,宋明运用了这本书的方法,研究了广义KP-BBM方程的周期波解 [12] 。
本文研究的方程形式如下:
(1)
我们将讨论方程在由参数a和b构成的平面上的分支相图。
2. 预备知识
2.1. 行波系统的奇点
假设我们有系统:
(2)
使得
的特殊点
称为奇点,计算雅各比矩阵
令行列式
的
就是该奇点的特征值。当奇点的特征值都不为零时,对应的情况如下:
① 如果
和
都是实数,且
不等于
,
,那么
是一个结点,并且,
和
都小于0时是稳定结点,都大于0时是非稳定结点;
② 如果
和
都是实数,且
,那么
是一个鞍点;
③ 如果
是实数,且
和
中至少有一个非零,那么
是一个退化结点,当
时是稳定的,
时是不稳定的;
④ 如果
是实数,且
,那么
是一个临界结点,当
时是稳定的,
时是不稳定的;
⑤ 如果
,
,那么
是一个焦点,当
时是稳定的,
时是不稳定的;
⑥ 如果
,并且可以找到
的首次积分,那么
是一个中心。
假设方程(1)存在行波解
,代入
,得到
代入方程(1),得到
对上式进行积分,并且取积分常数为零,得到
下面,令
代入方程,得到微分方程组
(3)
于是我们就把一个非线性偏微分高阶方程化简为一个二阶的常微分方程组。
接下来,令
我们可以得到本系统的奇点。
2.2. 行波系统的首次积分
由微分方程组(3),我们令
解得
于是,我们得到积分函数
当H取值为固定的常数时,可以得到
和y的关系,得到一条轨线。我们取经过某一点的H值,便得到了经过该点的轨线。取不同的值,我们得到许多条轨线,从而获得相图的形状。
3. 主要结果
3.1. 参数不同取值下的奇点情况
下面,我们需要研究方程:
当参数c不为零时,由求根公式判别法可知,当
时,方程有一个根;当
且
时,无实根;当
且
时,有两个不同的根;当
且
时,无实根;当
且
时,有两个不同的根。
当
时,系统奇点判断如下:
①
时,有
一个鞍点;
②
时,有一个鞍点
,一个中心;
③
时,有一个鞍点
,两个中心;
④
时,有一个鞍点
,两个中心;
⑤
时,有一个中心,两个鞍点,其中一个鞍点是
;
⑥
时,只有一个鞍点
;
⑦
时,有一个鞍点
,和一个退化奇点。
时的积分曲线图和数值模拟图见图1。
当
时,奇点判断如下:
①
时,有
一个中心;
②
时,有一个中心
,一个鞍点;
③
时,有一个中心
,两个鞍点;
④
时,有一个中心
,两个鞍点;
⑤
时,有一个鞍点,两个中心,其中一个中心是
;
⑥
时,只有一个中心
;
⑦
时,有一个中心
,和一个退化奇点。
时的积分曲线图和数值模拟图见图2。

Figure 1. The integral curve and numerical simulation diagram when
图1.
时的积分曲线图和数值模拟图
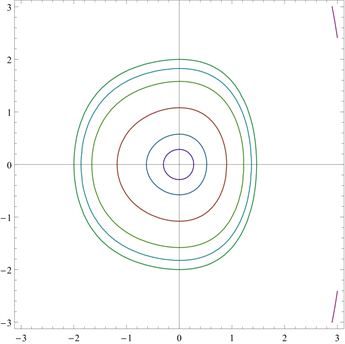
Figure 2. The integral curve and numerical simulation diagram when
图2.
时的积分曲线图和数值模拟图
当
时,
是一个退化奇点,奇点判断如下:
①
时,有
一个退化奇点;
②
时,有
一个退化奇点,还有一个中心;
③
时,有
一个退化奇点,还有一个鞍点。
时的积分曲线图和数值模拟图见图3。

Figure 3. The integral curve and numerical simulation diagram when
图3.
时的积分曲线图和数值模拟图
3.2. ab平面上的分支曲线和分支相图
接下来,为了得到分支曲线,我们令
解得结果为:
于是得到两条分支曲线
和
。
下面,我们将ab平面用分支曲线分割成不同区域,见图4:

Figure 4. Bifurcation curve on ab plane when
图4. 分别在
时的ab平面上的分支曲线
与之对应的分支相图分别见图5~7。
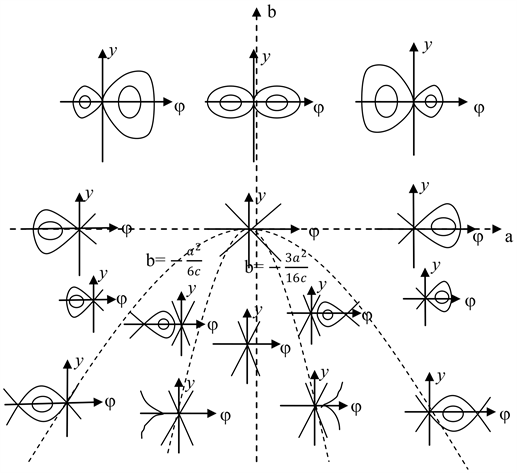
Figure 5. Bifurcation phase diagram on ab plane when
图5.
时的ab平面上的分支相图
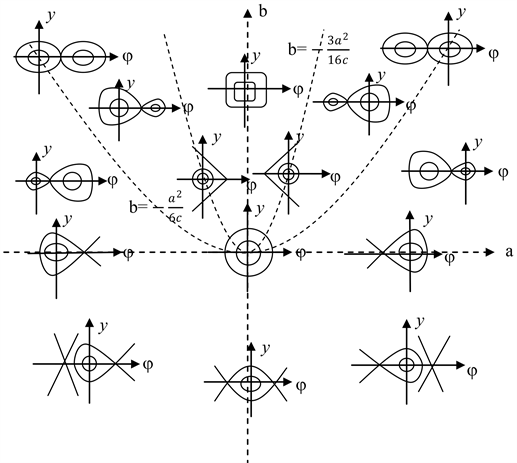
Figure 6. Bifurcation phase diagram on ab plane when
图6.
时的ab平面上的分支相图
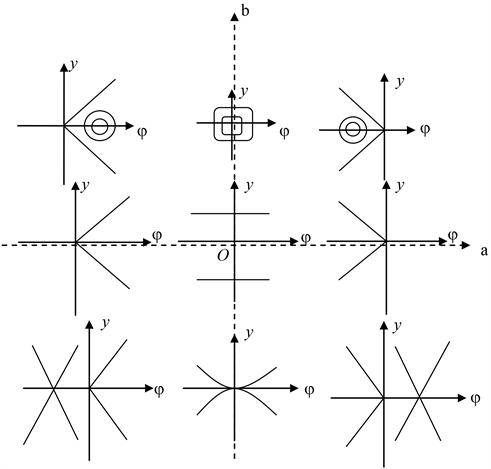
Figure 7. Bifurcation phase diagram on ab plane when
图7.
时的ab平面上的分支相图
4. 总结
本文的工作难点在于,方程中带有未知数a、b,而且变量替换时,行波解中也带有未知数c,于是我们需要进行繁杂的分类讨论。本文把c分成大于零、小于零和等于零三种情况来讨论。然后再讨论ab的关系对于奇点坐标的影响,从而得到ab关系的分界线,也就是分支曲线。最后在c的不同取值下,在ab平面上作出分支相图。
通过观察发现,不管c的取值为何,每个ab平面上的分支相图都是关于b轴对称的,也就是说,a的取值只是改变了相图的左右对称的方向。而且每个相邻的区域之间的相图存在缓慢的过渡,在边界上达到定性的变化,然后逐渐展开。