1. 引言
人类对海洋的开发与争夺贯穿人类文明的发展史。在全球化程度日益加深的今天,海洋更是世界各国经济文化交流的重要纽带。船舶作为人类开发海洋、利用海洋的工具,发挥着不可替代的作用。舰船目标主要包括民用船舶和军用舰艇。舰船目标识别是现代海上智能监控系统的重要组成部分,快速准确地识别各类舰船目标对监视海运交通、维护海洋权益、提高海防预警能力等方面有着重要的意义;在现代化战争中,舰船目标识别技术在预警探测、精确制导、战场指挥和侦察识别等军事领域都有广泛的应用。因此,舰船目标识别一直以来都是各国政府和军队研究的重点,是一个国家海洋装备现代化发展的重要方向之一。
传统的舰船目标识别主要是通过采集分析目标舰船的辐射信号或回波信息,使用信号分析和模式识别的方法进行判别;随着各类传感器的快速发展尤其是成像技术的不断进步,基于目标图像信息的识别逐渐成为了舰船目标识别领域的研究重点。本文旨在总结梳理舰船目标识别的流程与方法,并对其进行简要分析和展望。
2. 舰船目标识别技术
随着雷达技术、卫星技术、模式识别技术的迅速发展以及各类传感器的全球布控,舰船目标识别的技术手段逐渐增多,舰船识别技术呈现出多样化的发展趋势。虽然自动识别的技术方法多种多样,但各种方法的识别流程却大同小异,见图1。这些方法都需要对采集到的目标数据样本进行预处理和特征提取,然后根据提取到的目标特征进行训练和建模,最后把待识别的目标信息放入识别系统中进行分类与识别。
在众多的舰船目标识别技术中,根据识别过程中是否用到目标图像,可以把舰船目标识别技术分为基于成像和基于非成像两大类 [1]。
2.1. 基于成像技术的舰船识别
基于成像技术的舰船识别就是对传感器传回的目标舰船图像进行分析,根据图像的特征对目标舰船的属性、种类或者型号进行识别。随着各类成像技术的发展,基于成像技术的舰船目标识别也日趋成熟,不仅可以判断目标的方位,还能够较为准确地确定目标的详细类别,成为了舰船目标识别的主流方法。
基于成像技术的舰船目标识别一般分为三个步骤:图像获取与预处理、特征提取与算法选择、目标分类与识别。如图2所示。
2.1.1. 图像获取与预处理
1) 图像获取
成像技术的不断发展使得图像的获取方式逐步多样化,图像的质量也在不断提高。在诸多成像技术
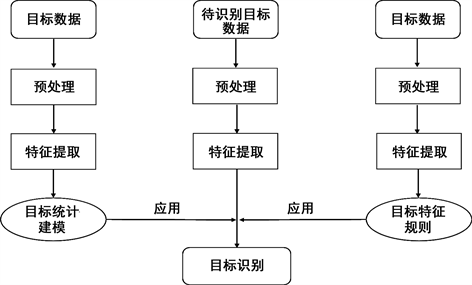
Figure 1. Flow chart of target recognition
图1. 目标识别流程图

Figure 2. Ship recognition process based on imaging technology
图2. 基于成像技术的舰船识别流程

Table 1. Comparison of the advantages and disadvantages of different imaging methods
表1. 不同成像方式的优缺点比较
中,应用到目标识别领域的主要有光学成像和雷达成像两大类。
随着电子技术和光电检测技术的发展,光学成像技术和光学图像处理技术日趋完善,高质量的光学图像越来越多地应用到目标识别系统。在舰船目标识别所使用的光学成像技术中,根据所利用的光的特性又可以分为为基于可见光的成像技术和红外成像技术。见表1。
可见光成像原理相对简单,技术实现较为容易,因此基于可见光的成像技术较早地应用于目标识别领域。可见光成像所得到的图像质量稳步提高,使得目标的特征更容易被发现和提取。近几年,基于可见光的成像技术取得了许多发展成果 [2],展现出十分巨大的发展潜力。但基于可见光成像易受海洋天气和光照条件的影响,成像质量不够稳定。
红外成像所利用的电磁波是位于可见光光谱之外的红外线。通过测量目标本身与背景间的红外线差可以得到不同的红外图像 [3]。红外成像技术能够提供丰富的目标信息和目标背景信息,具有较强的抗干扰能力。但是红外成像技术同样易受天气、温度等因素的影响。在海面上,海浪、云层等干扰的影响也会大大影响红外成像的准确度。
除了光学成像,雷达成像也是一种重要的成像方式。雷达成像属于有源成像,工作原理是利用雷达接收到的回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算出被测目标的大小、形状、重量和表面层的物理特性参数。不同于光学成像,雷达成像具有不受天气、光照干扰的特点,可以连续、实时地对海洋环境中的目标实施侦察监视,因而受到了许多国家与军队的广泛关注与高度重视。在雷达成像技术中应用最广泛的是合成孔径雷达(Synthetic ApertureRadar,SAR)成像。
SAR成像具有监测范围广、观测周期短、分辨率高、全天候监视等优点,目前国际上已有许多国家部署了众多星载SAR、机载SAR系统。在获得海量SAR数据的同时,国内外很多机构也同步开展了基于SAR图像的目标识别相关研究,许多识别系统已建设完毕:中国科学院电子研究所微波成像技术国家实验室开发的SAR图像舰船目标及尾迹检测系统ShipSurveillance [4] ;法国Boost-Technologies公司为海洋与海岸监测开发的SARTool系统 [5] ;加拿大Satlantic公司开发的海洋监视工作站(Ocean Monitoring Workstation,OMW)系统 [6] ;英国国防研究实验室QinetiQ开发的MaST (Automated Maritime Surveillance Tool)系统 [7],挪威防御研究机构NDRE (Norwegian Defence Research Establishment)开发的Eldhuset [8] ;美国的阿拉斯加SAR演示验证(AKDEMO)系统 [9],欧盟联合研究中心(JRC)的VDS系统 [10]。
2) 图像预处理
图像的预处理技术在基于成像技术的目标识别中占有很重要的地位。由于在基于成像技术的目标识别中,图像质量的高低直接影响识别算法的设计与识别结果的精度,因此有必要对一些图像进行预处理,才能从中提取出有用的信息。图像预处理的主要目的是增强图像中的真实有用的信息,减少图像中的无关噪声信息,最大限度地增强图像的可检测度。预处理的过程一般有数字化、几何变换、归一化、平滑、复原与增强等步骤 [11]。见图3。
2.1.2. 特征提取与算法选择
1) 特征选取
特征选取就是在获得目标的图像后,通过综合分析各类特征对分类识别的贡献,提取目标识别的关键特征。有了特征表示才能对不同目标做比较,进而完成识别。特征选取需考虑以下三方面问题 [12] :鲁棒性,这主要是由于遮挡、光照变化及视角改变等会造成图像表象的变化;简洁性,即用少量特征信息来描述目标,大大压缩目标的信息量,使整个算法简洁,也方便后续的处理;可计算性,即在特征信息获取后可能需要一定的处理方法,需要特征具有便于计算的特点。
根据特征选取的要求,舰船目标的识别特征主要包括以下三个方面:几何特征、运动特征和图像特征。
几何特征是指从目标图像上可以直观看到的几何特征,常用的特征包括尺寸、形状等。尺寸是指目标在图像中的大小尺寸。同一设备获取的图像比例尺是相对固定的,图像上目标尺寸通过数学换算可以得出真实目标的大小,通过目标的尺寸大小可以大致判断出目标舰船的用途、类别;形状也是对目标进行识别判断的重要特征,不同种类的舰船往往具有不同的形状特征,譬如说航空母舰有形状不规则的巨

Figure 3. The process of image preprocessing
图3. 图像的预处理流程
大直通甲板,驱逐舰和护卫舰的舰体一般情况下较为狭长,舰首略尖、舰尾略平,油轮和货轮由于装载物资较多,船体宽度大。
运动特征是指通过在某个时间段内对某一舰船的跟踪拍摄,获得其在某海域的航行运动特征,包括目标航线、航速、航向、航迹、编队队形等。民用船只在航行时通常有固定的航线;军用舰船则不同,由于其任务的特殊性,军用舰船往往没有固定的航线和航行速度。因而通过分析目标的航行轨迹,可以对目标舰船的属性有大致的判断。航向和航速可以通过目标舰船的尾迹特征来判别。
图像特征是一种抽象特征,不同于前面任何一种直观特征。在光学图像中,图像特征是像素、像素集合或它们的抽象表达,是图像中的隐藏信息,具体分为颜色、光流、纹理等特征。在工程实践时,常用的图像特征主要有点状特征、线状特征和区域特征 [13]。在SAR图像中,由于其成像原理的特殊性,其图像特征也比较特殊,一般应用较多的主要是几何结构特征、电磁散射特征、变换特征和局部不变特征 [14]。
2) 算法选择
不同的图像特征对应着不同的特征提取和分析算法。几何特征的主要提取算法有基于图像形态学的特征提取算法 [15],基于舰船轮廓的分类算法,基于活动外观模型的分类算法,基于结构特征的类型识别算法等,见表2;运动特征的常用检测提取算法有基于扫描的分类算法 [16] 、基于Radon变换的算法 [17] 、基于Hough变换的算法 [18] 等,核密度(Kernel Density Estimation,KDE)估计法 [19],混合高斯模型(Gaussian Mixture Model,GMM) [20] 等;基于图像特征的提取识别算法较多,常见的有基于阈值的检测算法 [21] 和最佳熵自动门限法 [22],此外应用较多的还有双参数恒虚警CFAR [23] 、多极化检测方法 [24] 、基于分维布朗场的分维数特征提取算法 [25] 等。近几年人工智能和神经网络 [26] 的兴起,也为图像识别带来了新的发展潜力,尤其是深度神经网络在面对海量的图像数据时,直接通过训练就可以建立通用的分类方案。因此神经网络技术被也广泛应用于舰船目标识别领域。
Table 2. Image feature and corresponding feature extraction algorithm
表2. 图像特征及对应的特征提取算法
2.1.3. 目标分类与识别
目标识别模型建立之后,就是根据目标的特征对待识别的目标进行分类识别。分类识别是通过分类器识别出舰船的类别。最简单的方法是模型匹配,即在图像上直接将像素灰度与模板进行匹配。基于模板匹配的目标识别因计算量小、识别率高等优点,已被应用于汽车识别、指纹识别、人脸识别等许多目标识别领域,该方法对视频或连续图像中跟踪特定目标也有很好的准确性 [27]。基于模板匹配的识别方法实时性好,但是抗干扰能力、适应性和鲁棒性均不高。
针对模板匹配的不足,许多学者提出了基于特征元素匹配的识别方法。按照匹配时采用的特征元素,基于特征元素匹配的识别方法可以分为基于点的匹配 [28],基于线的匹配 [29],基于区域的匹配 [30] 和基于其它几何基元的匹配 [31]。其中基于点的图像匹配方法按照匹配密度又可以分为特征点匹配 [32],准稠密匹配 [33],稠密匹配 [34]。
2.2. 基于非成像技术的舰船识别
虽然基于成像技术的舰船识别发展迅速,但在舰船目标的识别技术中,基于非成像技术的识别方法依然占有重要的地位。譬如脉冲雷达、声呐等装备,依靠主动或被动的方式获取目标的辐射信号或是回波信号,通过信号分析或模式识别的方法来对采集到的信号进行分析判断,进而实现目标识别。基于非成像的识别方法实现较为简单,但是也存在一定局限性,比如说只能判断目标的距离与方位,无法准确识别出目标的具体类别和型号。
基于非成像技术的舰船识别一般分为以下三个步骤(如图4所示):信号检测和采集、特征变换与提取、目标分类与识别。
2.2.1. 信号检测和采集
在基于非成像技术的舰船目标识别技术中,目标信号的来源根据信号采集设备的工作模式可以分为主动和被动两种方式。无论采用哪种方式,信号的准确检测和采集都是识别的前提与关键。在信号检测和采集的过程中,往往还涉及到信号的降噪和滤波等预处理。
主动获取方式是指设备主动发出声波、电磁波等信号,然后接收目标的回波信号作为特征信号。在主动目标识别中,信号的回波功率、回波波形、反射参数、多普勒信息等特征都可以作为目标识别的特征信息。
被动获取方式是指设备通过检测目标本身产生的信号获取特征信号,其中最常用的是噪声信息。噪声信息是指舰船的发动机、螺旋桨等部件在工作状态下产生的声音信息。通过分析噪声信息的功率、频
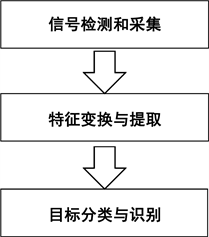
Figure 4. Ship recognition process based on non-imaging technology
图4. 基于非成像技术的舰船识别流程
谱等特征可以较为准确地推断出舰船目标的吨位、类型。此外,在被动获取方式中,磁场信号、水压物理信号等同样可以作为反映舰船类别的特征信号。
2.2.2. 特征变换与提取
各类传感器传回的目标信号包含多种目标的特征信息,诸如尺度、方位、距离、频谱、声信息等。但是在获得目标信息后直接对目标进行判断是不现实的。只有通过对采集到的信号进行特征变换和提取,才能够得到对目标识别有用的特征信息。因此,基于非成像技术的舰船目标识别的过程中最重要的环节就是提取有效的信号特征。
在提取信号特征时,涉及到信号特征的变换。可以把信号特征提取看作是一种从目标空间到特征空间的映射。该映射应该具备以下三个特点:映射稳定、计算简单、维度独立。映射稳定是指由目标空间到特征空间的映射关系应该是相对稳定;计算简单是指映射过后的特征计算量减少或者计算复杂度降低;维度独立,是指映射过后特征向量各维度之间尽可能相互独立。
在舰船目标识别领域,信号特征的提取一般通过各种现代信号处理方法实现。常见的特征提取方法有谱分析法、时域自相关法、时频分析法等。
谱分析法是将信号建模为周期平稳信号,通过计算信号中的谱相关系数特征,提取信号调制特征并进行参数估计。谱分析方法在舰船目标识别中的应用较为广泛,主要体现在对线谱、动态谱、功率谱、以及双重谱的提取和研究,并在此基础之上,对高阶谱进行研究和应用 [35]。谱特征提取方法包括基于稀疏表示提取谱线的方法 [36],DEMON谱分析方法 [37],构造非线性频谱字典的方法 [38] 等。
由于不同调制信号对应不同的自相关函数,时域自相关法通过计算时域自相关函数对雷达信号进行接收和识别,并分析信号的参数。该方法具有原理简单易懂、频带宽、实时性强且易于实现等优点,但无法对非线性调频信号、频率编码信号、多相编码信号进行分析。
传统的信号分析方法是信号进行整体变换,将信号分解到不同的频率上去。这种方法不能建立时域和频域的对应关系。时频分析法克服了这个缺点,在时间频率的二维平面上,利用时间和频率的联合分布来描述信号 [39]。在时频分析法中较为常用的方法包括短时傅里叶变换(Short time Fourier transform,STFT) [40] 和小波变换(wavelet transform,WT)。短时傅里叶变换是一种线性时频分析方法,算法简单,易于实现,应用最为广泛,但是其分辨率不高,难以处理含有多种信号成分的复杂信号。小波分析是一种新的变换分析方法,它继承和发展了短时傅立叶变换局部化的思想,同时又克服了窗口大小不随频率变化等缺点,能够提供一个随频率改变的“时间–频率”窗口,是进行信号时频分析和处理的理想工具 [41]。在具体工程实践中,常用的方法有基于小波变换的舰船辐射噪声特征提取 [42],小波多分辨率分析方法 [43],小波变换和功率谱相结合的提取方法 [44],水下回波边缘特征提取 [45] 等。
2.2.3. 目标分类与识别
目前,具有代表性的识别分类器包括专家系统分类器、支持向量机分类器、最大似然分类器、神经网络分类器等。
专家系统分类器是一种基于规则的分类器,实现原理是利用丰富的领域知识和推理对目标进行判别与分类。专家系统分类器包括知识库和推理机两部分。知识库用于存放领域知识与规则等判别条件;推理机则是利用知识库中的知识,通过一定的方法从已知事实推理出新的事实。推理分为演绎推理和归纳推理,也可分为经典逻辑推理和模糊逻辑推理 [46]。
支持向量机是统计学习中的重要理论之一,其原理和核心思想是根据有限的样本信息在复杂的模型中寻求一个最佳分类超平面 [47]。由于具有结构简单、学习和预测时间较短、推广能力强等优势,支持向量机分类器被广泛地应用与各类目标识别系统中。
Table 3. Comparison of two ship target recognition methods
表 3. 两种舰船识别方法的比较
最大似然分类又称为贝叶斯分类,是一种有监督的分类方法。分类时使用贝叶斯理论,通过融合各种先验知识来计算密度分布函数,具有原理简单、实施方便等优点。根据对未知参数的处理方法的不同,最大似然分类方法可以分为三类:平均似然比检验、广义似然比检验、混合似然比检验 [48]。
随着采集的信号数据量的增加,传统的信号分析方法已逐渐不能满足行业应用需求。因此,将人工神经网络与传统信号分析相结合的方法逐渐成为信号分析处理领域的研究热点。在基于非成像的舰船识别技术中,利用神经网络技术的舰船信号分析方法主要又基于神经网络的舰船磁场分析方法 [49],基于BP神经网络和多神经网络分类器的DEMON谱特征提取方法 [50],基于神经网络的舰船水压场特征量提取方法 [51] 等。
3. 两类技术的比较
上文对基于成像技术和基于非成像技术两类舰船目标识别技术的流程与方法进行了简要介绍,并对其各自的适用范围进行了简单分析。两类方法有着各自的优缺点及适用范围,二者的对比如表3所示。
4. 结语
本文简要介绍了舰船目标识别的技术方法与实现流程,根据识别过程中是否用到目标图像信息将识别技术分为两大类,并对这些技术方法的原理和研究现状做了阐述,分析了不同技术方法的优缺点。
随着各国政府和国民的海洋意识的不断提高,作为维护国家海洋权益重要手段之一的舰船目标识别技术也会得到更多的关注,其发展前景十分广阔。在信息技术日益发达的二十一世纪,尤其是数据量爆炸式增长的当今社会,传统的舰船目标识别技术面临着前所未有的机遇与挑战。如何把当下炙手可热的大数据分析处理技术和人工智能技术应用到舰船目标识别领域,将会是今后一段时间舰船目标识别技术的研究趋势和发展方向。
参考文献