摘要: 科学技术的快速发展使得自动驾驶汽车出现在大众的视野中,其特有的自主性也为人们的出行带来了便利。但是,由于自动驾驶汽车系统的复杂性和新颖性,且其依赖于先进的传感器和硬件,一旦出现故障,可能会发生交通事故,对行人和非机动车造成一定的损害。自动驾驶汽车所具有的自主性,在责任的认定上对传统侵权责任的认定方式产生了冲击,往往会发生难以确定侵权主体,在此情形下,运用动态系统论将原因力、过错和危险性作为侵权责任的基础评价要素,对各构成要件所产生的作用进行评价,针对不同要件产生的不同程度的影响进行综合的考量,以此来分析自动驾驶侵权的责任主体。
Abstract:
The rapid development of science and technology makes the self-driving car appear in the public’s vision, and its unique autonomy also brings convenience to people’s travel. However, due to the complexity and novelty of the autonomous vehicle system, and its reliance on advanced sensors and hardware, once failure, traffic accidents may occur, causing certain damage to pedestrians and non-motor vehicles. Autonomous vehicles have a certain degree of autonomy, which has an impact on the identification of traditional tort liability, and it is often difficult to determine the infringing subject. In this case, the dynamic system theory is applied to take causative force, fault and risk as the basic evaluation elements of tort liability, evaluate the role of each component element, and comprehensively consider the influence of different elements to different degrees, so as to analyze the subject of liability for automatic driving infringement.
1. 引言
人工智能的发展经历了漫长的岁月,自动驾驶技术作为其重点研究方向之一,上世纪七八十年代逐渐兴起。自动驾驶汽车就是利用人工智能、全球定位系统和传感器等技术相互配合,以实现无需驾驶员的操作就可以自动行驶的汽车。自动驾驶技术可以解决拥堵、尾气排放等问题,能够很大程度上减少交通事故的发生,提高道路安全性,但该项技术将长期处于人机共驾阶段,事故的发生是无法避免的,在此种情况下侵权行为的产生会面临责任主体难以确定的困境。早在二十一世纪初期,我国的一些大学和科研机构便踏上了自动驾驶技术的探索之旅,但受到当时技术水平的限制,并未有较大的进展。随着科学技术的发展,算法能力、传感器能力得以改进,自动驾驶技术慢慢步入科技舞台的中央。2018年,百度Apollo平台的推出,成为国内首个开放的自动驾驶开发平台,促进了整个行业的合作和发展 [1] 。目前,自动驾驶技术已经开始在一些特定场景下商用化部署,例如封闭场景、公共交通工具、物流配送等。某些地区甚至已经实现了在公共道路上的试点运营。许多汽车制造商也推出了一些辅助驾驶功能,如自动泊车、自适应巡航控制、车道保持辅助等。这些系统利用传感器和算法来感知和理解周围环境,提供基于日常驾驶的辅助功能。在探究自动驾驶技术时,以知网数据库为来源,以自动驾驶技术为主题进行检索,分析近年来的发文量,结果如图1所示。由图可知,尽管自动驾驶技术于上世纪八十年代已有所提及,但在二十一世纪初期才逐渐有学者开始发表文献,近几年的研究热潮虽受疫情影响略有下降,但也渐渐好转。对所检索文献的作者进行分析,结果如图2所示,可以看出目前自动驾驶技术的研究阵地主要集中在高校,还有一些汽车技术研究中心等。日本Tsukuba实验室于1977年研发的自动驾驶汽车是最早实现自动驾驶的汽车。以全球最大数据库Web of Science为数据来源,以Autonomous Driving Technology为主题进行检索,分析近年来国内外文献发表数量,结果如图3所示,可以看出近六年为国内外对自动驾驶技术的研究热潮。从图4中可以看出在自动驾驶技术领域发表文献数量前三的国家分别是中国、美国、英格兰。
2. 自动驾驶侵权主体认定的困境
2.1. 自动驾驶汽车责任主体具有多样性
自动驾驶技术在不断的发展和完善,意味着未来会产生一种全新的驾驶方式,侵权行为的发生也会引发全新的法律责任问题。由自动驾驶系统和人类共同操作或者由自动驾驶系统独立操作的汽车造成交通事故后,此时就面临责任主体难以确定以及自动驾驶汽车能否作为主体承担责任的问题。目前有两种自动驾驶汽车分级体系分别是美国国家公路交通安全管理局(NHTSA)提出的五级体系和国际汽车工程师协会(SAE)提出的六级划分,近年来国际汽车工程师协会(SAE)分级体系成为主流 [2] 。根据自动化程度的不同,国际汽车工程师协会(SAE)将自定驾驶技术划分为六个技术等级,如表1所示。由图可见,L0~L2阶段是驾驶辅助阶段,L3~L4阶段是高度自动驾驶阶段,L5阶段则无需驾驶员的介入,是完全自动驾驶阶段,也是自动驾驶技术的成熟阶段。L1~L4阶段下自动驾驶发生交通事故造成损害的,可能不仅仅是因为驾驶员的错误操作,还可能是由于自动驾驶系统的错误指令或者自动驾驶系统产品本身出现的问题,也可能是几者的结合产生的后果。主体的多样性为自动驾驶汽车侵权责任的认定留下了难题。
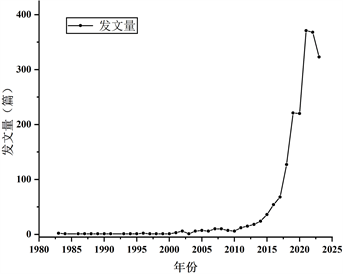
Figure 1. Number of automatic driving technology publications
图1. 自动驾驶技术发文量
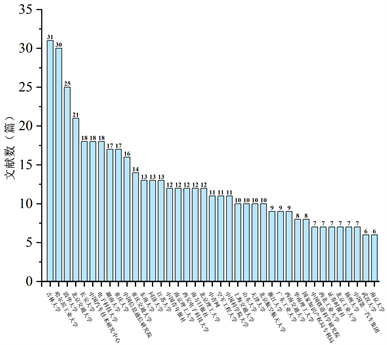
Figure 2. Autonomous driving technology research institute
图2. 自动驾驶技术研究机构
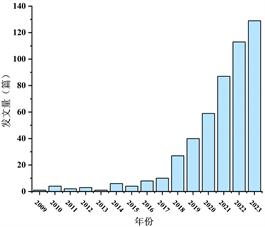
Figure 3. Number of published domestic and foreign literatures on autonomous driving technology
图3. 自动驾驶技术国内外文献发表数量

Figure 4. Ranking of the number of automatic driving technology published at home and abroad
图4. 自动驾驶技术国内外发文量排行

Table 1. Autonomous driving technology level [3]
表1. 自动驾驶技术等级 [3]
2.2. 自动驾驶系统是否具备民事主体资格
完全由人类操控驾驶的汽车发生交通事故之后,控制者本人即是责任主体,但在自动驾驶的情况之下却并非如此。控制者指的是事故发生时对汽车实际进行操纵的人,在L0阶段,驾驶员毫无疑问就是汽车的控制者,发生交通事故后,除无则或者免责情形的存在,驾驶员应当承担相应的责任。但是在自动驾驶汽车的情况下,即L1~L4阶段,控制者不止是驾驶员,还有系统或多或少的介入。此时控制者便有了驾驶员和自动驾驶系统这两种可能,结合SAE分级体系可以看出责任主体在不同阶段的变化,这并不是驾驶员、自动驾驶系统、生产者、保险公司之间的责任分配的问题,而是因自动驾驶系统做出的决策具有自主性,到了L5阶段更是实现了完全自动驾驶,由自动驾驶系统完全控制车辆,发生交通事故后,作为事故发生时控制车辆的主体,是否应当赋予其民事主体资格,以承担相应的责任。
3. 自动驾驶汽车交通事故责任主体的认定分析
3.1. 自动驾驶侵权责任主体认定的必要性
自动驾驶汽车的出现可以缓解交通压力、减少空气污染,提高道路安全性,但并不意味着自动驾驶一定可以避免交通事故的发生。现如今自动驾驶汽车已出现了多次车祸,二零一六年一月二十日,京港澳高速公路河北省邯郸市路段出现了一起汽车追尾事件,一辆特斯拉轿车直接撞上一辆正在作业的道路清扫车,特斯拉轿车当场损坏,司机不幸身亡 [4] ,经交警确认在这次事故中特斯拉的司机应负主要责任,特斯拉的司机曾在部队担任大型军用车辆的驾驶员,有着丰富的驾驶经验,但根据行车记录仪显示,事故发生的前二十秒就可以看见道路清扫车的尾灯但司机却没有任何反应径直撞了上去,在后来的庭审中特斯拉承认车辆在案发时处于自动驾驶状态,这就可以解释为什么经验如此丰富的驾驶员当时没有做出任何应急反应。这样的事故不在少数,也使得自动驾驶汽车的安全问题成为了人们关注的重点,事故的解决必然离不开责任主体的确定,这无疑对传统侵权责任主体的认定提出了挑战,如何认定责任主体也在一定程度上影响了自动驾驶汽车的普及与应用。因此,对于自动驾驶汽车侵权责任主体的认定研究具有现实意义。
3.2. 不同阶段责任主体的认定
L0阶段,仅有驾驶员控制车辆,发生交通事故机动车一方有责任时,责任主体当然为驾驶员;在L1阶段,控制车辆的主要还是驾驶员,自动驾驶系统仅为驾驶员提供一些刹车、上坡起步等辅助功能,驾驶员可以随时下达或者收回这些辅助功能对车辆的控制权,这一阶段的责任主体也是驾驶员。L2阶段中驾驶员可以有条件的主动将控制权全部交给自动驾驶系统,发生事故后,若驾驶员授权的时间或者条件不合理,那么责任主体应为驾驶员,相反的则由自动驾驶系统承担责任。L3~L4阶段,主要完成驾驶操作的是自动驾驶系统,驾驶员则处于从属地位,仅在某些紧急状况下才进行操作,L4阶段的自动化更高。可以说从L3阶段开始,自动驾驶汽车责任主体的认定问题就显现出来了。
在L3~L4阶段,若是由自动驾驶系统发出指令进行驾驶行为的,驾驶系统则会涉及到责任承担的问题,此时的责任主体可能包含机动车的使用人、所有人、生产者、制造商、系统开发商等。部分学者认为汽车的使用人对自动驾驶汽车享有支配权,是自动驾驶情形下的利益获得者,根据现有侵权责任规则,应当由汽车的使用者承担责任。但这一归责方式意味着无论是驾驶员的不当操作还是自动驾驶系统或者汽车本身出现了问题,都应当由驾驶员承担责任,实际上加重了驾驶员的责任。而国外学者Duffy认为,自动驾驶汽车所拥有的自主决策能力在一定程度上与动物相类似,动物和自动驾驶汽车都可能出现超出所有人控制的行为,有造成他人人身或财产损失的风险,因此自动驾驶汽车侵权可以参照适用动物侵权责任体系。在这一观点下,自动驾驶汽车侵权责任并非着眼于汽车使用人对侵权行为承担责任,其产生原因在于物和行为人间的所有关系 [5] 。还有学者认为,自动驾驶的过程中,如果自动驾驶系统出现故障作出错误指令导致交通事故发生,那么自动驾驶汽车的生产者、销售者就应承担产品责任,就目前而言这一情形在自动驾驶汽车发生交通事故中比例较大,学界也普遍认为应当由生产者承担责任 [6] 。
3.3. 自动驾驶系统尚不具备民事主体资格
自动驾驶系统因其具有一定的自主性,在实际操作过程中,可能会出现系统作出超出设定指令的行为而导致交通事故的发生。此时责任主体的确定和责任的分配就涉及到自动驾驶系统的主体资格问题。目前不同国家和地区对自动驾驶汽车的立法都处于起步阶段,没有形成统一的标准。美国是自动驾驶领域的领跑者,但立法相对滞后,各州仍在通过相关法律,NASA等部门发布指南和标准以指导自动驾驶汽车测试。欧盟已出台《自动和连连车指令》为自动驾驶汽车设置技术标准和安全要求,但在事故责任方面较为模糊。中国尚未出台有关自动驾驶汽车的专门法律法规,但已在多个城市开展自动驾驶汽车道路测试。联合国经济commission (UNECE)正致力于制定一个国际层面的自动驾驶汽车监管框架以促进全球互操作性。总的来说,随着自动驾驶技术的进展,各国积极研究出台相关立法,但立法进程复杂,需要平衡多方利益。
有的学者认为要想彻底解决自动驾驶汽车侵权责任的认定问题,应该赋予自动驾驶汽车民事主体的资格;而有的学者认为由人类设计并控制的自动驾驶汽车不具备自己独立的意志,并不满足成为民事主体的条件。自动驾驶系统虽然模拟了人类的驾驶行为,甚至能够作出比人类更为精确的操作,但根本上讲自动驾驶系统的运行是基于设计者的设计,系统本身并不具备人类的智慧和思维,人类驾驶具有丰富的视角、度量和反应能力,而自动驾驶系统多采用一固定的前视摄像头,其视角和反应能力较为局限 [7] 。且人脑具有对复杂场景进行分类和处理的能力,自动驾驶系统往往难以应对复杂多变的交通环境。学界的多次探讨得出了初步的共识,即目前来看,赋予自动驾驶汽车民事主体的资格没有必要性和正当性,这对解决侵权责任也并无益处 [8] 。
4. 动态系统论视角下自动驾驶侵权责任主体认定
4.1. 动态系统论概述
动态系统论(DST)起源于20世纪70年代,最早是由奥地利学者维尔伯格提出,后经日本学者山本敬三等人的介绍与解释传入我国 [9] 。动态系统理论的核心观点认为:任何系统都是由不断变化的变量组成的动态网络,这些变量通过连续不断的互动形成系统的组织结构。它强调系统多稳态性、边缘稳定性、突变与适应等的重要性,而非单一的平衡态,表现在法学上就是,其强调各种利益和诉求在法律评价上的重要性。动态系统论下的自动驾驶侵权责任与传统的侵权责任要件模式最大的区别就是,传统的侵权责任构成要件是“全有或者全无”的,要想认定侵权责任,侵权行为、损害结果、因果关系和主观过错四项构成要件是必不可少的;而动态系统论下的自动驾驶侵权责任的认定,则要求对各构成要件所产生的作用进行评价,针对不同要件产生的不同程度的影响,进行综合的考量。自动驾驶汽车侵权主体难以确定正是因为自动驾驶汽车特殊的构造机理对传统侵权责任的认定方式产生了冲击,而动态系统论将原因力、过错和危险作为侵权责任的基础评价要素,为我们分析自动驾驶侵权责任提供了方法论体系。
4.2. 自动驾驶侵权中各要素的确定
运用动态系统论的方法分析自动驾驶侵权,首先就要确定该体系中能够认定自动驾驶汽车侵权责任的各种要素。从客观上来看,我们需要明确自动驾驶致损这一行为产生的原因以及其与造成损害结果之间的关系,即侵权法中“原因力”这一要素。“原因力”主要适用于判断“多因一果”的因果关系中。在人机共同操作的自动驾驶汽车侵权案件中,造成损害的原因可能并不单单只是一方面的,既可能是驾驶系统的指令错误,也可能是驾驶人的违规行为或者不当操作。因此应当将“原因力”作为动态系统体系的一项要素。
从主观方面来看,研究驾驶人在致损时的主观心理也是很有必要的,主观过错既是认定侵权行为的归责要素,也在认定损害赔偿中有着重要作用。它不仅能够表明驾驶人在实施侵权行为时的主观心理,而且也能够对“原因力”的探究起到辅助作用,因此应当将“主观过错”作为动态系统体系的一项要素 [10] 。自动驾驶汽车系统具有复杂性和新颖性,自动驾驶系统依赖于先进的传感器和硬件,但这些设备仍存在坏死和故障的风险,并且自动驾驶系统依赖大量复杂的算法和软件,目前在堵车、路口、临时产生的干扰等复杂的交通场景或者在恶劣的天气中存在局限性。总的来说自动驾驶汽车仍然是一个相对新兴的科技,在安全性、可靠性方面有待进一步提高和验证,自动驾驶汽车的失灵无疑也会带来许多难以把控的风险,自动驾驶汽车的研发者、制造者不可避免的造成了这些危险性,驾驶人则作为自动驾驶汽车的利益获得者,这些人都应当承担相应的责任和义务。因此应当将“危险性”作为动态系统体系的一项要素。
4.3. 自动驾驶侵权中的各要素
4.3.1. 原因力
侵权法中的原因力(causation)指的是侵权者的行为是否是造成损害的实质原因,这对于决定侵权者是否应对损害负责非常重要。在自动驾驶侵权中判定原因力时,需要考虑两个问题:一是同一因素原因力,如果有多个因素共同造成损害,侵权者的行为是否足以单独造成完全相同的损害;二是次级因素原因力,如果侵权者的行为只是促成因素而不是主要原因,是否仍然存在原因力关系。为了证明原因力,往往需要专家鉴定、模拟测试或其他科学方法来支持,如果无法证明侵权者行为与损害之间的原因力关系,那么该侵权者将不会因损害而负责。
自动驾驶侵权的案件中,特别是处于L2~L4阶段的人机共同操作情形下,造成损害的原因可能并不单单只是一方面的,既可能是驾驶系统的指令错误,也可能是驾驶人的违规行为或者不当操作,动态系统论则要求分别认定各要素对损害结果发生的原因力大小。具体而言,自动驾驶汽车与传统汽车最大的区别就是自动驾驶汽车所具有的自主性,自动驾驶汽车可以通过各种传感器、摄像头等独立感知周围的环境和道路状况,无需人类驾驶员的干预,并可以根据其感知到的信息自主作出决策,选择最佳的驾驶模式和行为策略。在自动驾驶状态下发生的交通事故既可能是由于产品的缺陷所导致的,也可能是驾驶员未及时根据系统的指令接管汽车,当然也不乏其他因素造成这一损害结果。总之,自动驾驶模式下发生事故的原因较为复杂,各种因素间互相作用、影响,造成了损害结果,动态系统论的引入可以对驾驶员过错、自动驾驶系统错误指令、自动驾驶系统的产品质量问题等因素进行综合考量,避免某一要素全有或者全无的僵化思维,对造成事故的原因进行动态评价。
4.3.2. 主观过错
自动驾驶汽车发生交通事故造成侵权时,并不能完全排除是由于驾驶人的不当操作所导致的,驾驶人可能存在一定的过错,且在自动驾驶汽车的L0~L4阶段或多或少都会存在人类驾驶员的介入,因此,驾驶人也可能成为造成自动驾驶汽车侵权行为的原因力。一方面,驾驶人在驾驶过程中以消极、不作为的方式无视系统发出的警示、求助信号,没有及时接管汽车而发生交通事故的,由此造成的损害结果应当由驾驶人承担 [11] ;另一方面,自动驾驶系统依赖于先进的传感器和硬件,但这些设备仍存在坏死和故障的风险,需要定期维护和及时更新,这就要求自动驾驶汽车的所有人或者驾驶人尽到及时更新的义务,若因系统未及时更新导致系统出现漏洞从而发生交通事故的,此时驾驶人存在过错,应当承担相应的责任。自动驾驶汽车的生产者、制造者也可能会存在过错。一方面,为了保证自动驾驶汽车在使用期间的安全,自动驾驶汽车生产者应告知用户产品功能的局限性和使用限制,避免造成用户误解而引发安全问题;另一方面,在自动驾驶汽车投放市场以后,生产者、制造者应当加强其所销售产品的监管,并有义务持续改进产品的算法和功能,填补漏洞,从而使自动驾驶水平不断提升,通过系统更新的方式提供给用户。若是因为生产者、制造者未监测到系统异样或者未及时更新系统导致损害结果的,生产者、制造者应当承担产品责任。由此可以看出,在自动驾驶汽车侵权中,各方当事人都有存在主观过错的可能性,并不能仅考虑单个因素,而是要考虑各方当事人可能出现的过错及其位阶的情况下,综合进行评价。
4.3.3. 危险性
由于自动驾驶汽车系统因具有复杂性和新颖性,依赖于多种传感器为其提供环境觉知,一旦其中一项传感器出现故障,可能会导致无法正常工作。此外,自动驾驶汽车的运行模式与驾驶人的驾驶行为存在一定的差异,在实际的驾驶过程中往往会出现驾驶人没有及时应对系统作出的行为而导致事故的发生。不同阶段的自动驾驶汽车的危险性也是不同的,L0~L2阶段除了一些特定情形下会使用到辅助系统,大多数时候是由人类驾驶员操控的,其危险程度较低;L3~L4阶段的自动驾驶汽车相较于前面阶段,其自主性较高,更多的依赖于驾驶系统的指令进行驾驶行为,而这些指令是不可预测的,危险性也就高于L0~L2阶段的自动驾驶汽车;L5阶段的自动驾驶汽车已经达到了完全的自动化,在这一阶段下无需生产者、制造者的时时监管,也不需要驾驶人在特定情形下对自动驾驶汽车进行接管,其危险性应当是高于L0~L4阶段的自动驾驶汽车,综上可以得出,自动驾驶汽车的危险性按照其自动化等级可以表示为:L0~L2 < L3~L4 < L5。现有技术下自动驾驶汽车的安全性还不能得到彻底的保障,无法消除其对于行人和非机动车可能存在的危险,因此将危险性作为运用动态系统分析自动驾驶汽车的要素之一是合乎逻辑的。动态系统论下,各要素并非随意确定,在适用时也必须遵循基础评价,比如仅由于自动驾驶系统的错误指令造成侵权的,其应当承担相应的责任;若自动驾驶汽车本身没有任何违规操作,产生的危险性微乎其微,就不应承担责任;若同时与其他要素共同作用造成损害的,需要对比各要素产生作用的强度,以此来确定责任主体。