1. 引言
矩阵方程在控制理论 [1] 、系统理论 [2] 和应用数学 [3] 等许多领域都有重要的作用,比如Sylvester矩阵方程可以用来恢复缺失或者损坏的信号或图像 [4] ,也可以用来研究线性时不变系统的稳定性 [5] 。另外,五点差分格式求解椭圆方程时会遇到Sylvester矩阵方程 [6] ,在常微分方程定性理论研究及数值求解的隐式Runge-Kwutta方法与块方法也会涉及到Sylvester矩阵方程 [6] 。对于它的一般解,基于Arnoldi过程,Hu等人 [7] 给出了求解
的Galerkin算法和最小残差法(MINRES);基于块Arnoldi过程,El Guennouni A等人 [8] 给出了求解
的块GMRES方法(BGMRES);为了提高收敛速度和缩短运算时间,基于全局Arnoldi过程,Fatemeh Panjeh Ali Beika等人 [9] 提出了求解Sylvester矩阵方程组的全局完全正交化方法(Gl-FOM)和全局极小残量法(Gl-GMRES)。由于Krylov子空间方法的收敛速度依赖于方程系数矩阵谱的性质,选取合适的预条件矩阵,往往可以提高收敛速度,为了进一步提高算法的收敛速度,Bouhamidi A等人 [10] 给出了预条件块Arnoldi方法求解Sylvester矩阵方程,Kaabi [11] 等人提出了预条件Galerkin算法(PGal)和预条件最小残差法(PMR)求解Sylvester矩阵方程。基于预条件全局Arnoldi过程,徐冬梅等人 [12] 给出了求解Sylvester矩阵方程组的预条件全局正交化方法(PG-FOM)和预条件全局极小残量法(PG-GMRES)。对于约束解,Dehghan和Hajarian [13] [14] 提出了求解广义Sylvester矩阵方程组的自反解和广义双对称解的CGNE方法。Dehghan和Hajarian [15] [16] 也通过推广CGNE方法得到了一般矩阵方程组的解和广义双对称解。但是,一般情况下,CGNE方法收敛速度较慢。最近,吕长青等人 [17] 和Masoud Hajarian [18] 提出了利用BiCR算法求解广义Sylvester矩阵方程组的中心对称解和反中心对称解,证明了这种BiCR算法可以在有限步内找到广义Sylvester矩阵方程组的中心对称解,并且选取特定的初始矩阵,可以得到最小范数解;闫同新等人 [19] 提出了利用BiCR算法求解广义Sylvester矩阵方程组的自反解和反自反解以及最小Frobenius范数对称解;Masoud Hajarian [18] 提出了利用BiCR算法求解广义Sylvester矩阵方程组的对称解,收敛性分析表明,BiCR算法在不存在舍入误差的情况下,可以在有限次迭代内计算出广义Sylvester矩阵方程组的最小Frobenius范数对称解对。然而,Sylvester矩阵方程组的perhermitian解目前还没有被研究过。因此,本文将给出求解Sylvester矩阵方程组的perhermitian解的BiCR算法。
在本文中,考虑如下Sylvester矩阵方程组
(1.1)
其中,已知系数矩阵
和常数矩阵
,
是未知矩阵。
2. 预备知识
定义2.1 [20] [21] 对给定的反射矩阵
,即
,
。如果矩阵
满足条件
(
),那么称其为反射矩阵S的perhermitian矩阵(skew-perhermitian矩阵),记为
(
)。
定义2.2 [22] [23] 设任意
,规定
则称
为矩阵
的实内积,记作
。
定义2.3 [22] [23] 设矩阵
,规定
则称
为矩阵X的Frobenius范数,简称F范数。
定义2.4 [22] [23] 设矩阵
,如果
,那么矩阵
是正交的。
引理2.1 设矩阵
,有
引理2.2 设矩阵
,则矩阵
是正交的。
证明:因为
所以
,因此矩阵
正交。 □
引理2.3 设矩阵
,那么
。
证明:因为
所以结论成立。 □
根据引理2.3,我们可以很容易地构造一个perhermitian矩阵。
引理2.4 设矩阵
,
,
为反射矩阵,有
证明:
证毕。 □
引理2.5 如果矩阵
,
,那么
,换句话说,
是
的一个子空间。
证明:因为
证毕。 □
3. 迭代方法
在这个部分,我们提出一种用于求解Sylvester矩阵方程组的perhermitian解的BiCR算法。
3.1. BiCR算法求解Sylvester矩阵方程组的Perhermitian解(表1)
首先,给出该算法的迭代过程。
通过算法3.1,我们可以知道
和
都是反射矩阵S的perhermitian矩阵,
,
,
,
,其中
。
3.2. 收敛性分析
接下来,对该算法进行收敛性分析。我们可以通过以下定理来证明所提算法的收敛性。
定理3.1 如果对于正整数m,
、
,
,那么
(3.1)
(3.2)
(3.3)
证明:我们采用数学归纳法来证明这个定理,可以得到上述(3.1)~(3.3)。
首先,当
,我们假设有
根据上述归纳假设,接下来我们来证明
时(3.1)~(3.3)的情况,可得
(3.4)
(3.5)
当
,由于
,根据上述(3.1)~(3.3),可得
当
时,通过归纳假设可得
因此,对于次数
成立,数学归纳法证明完成。 □
定理3.2假设矩阵方程组(1.1)是相容的,在没有舍入误差的情况下,对任意初始矩阵
,根据算法3.1,可以在有限步迭代得到矩阵方程组(1.1)的perhermitian解。
证明 首先,定义空间
的实内积为
,其中
。如果
,那么
是该空间的一组正交基。根据(3.1)式可以得到
,即
是矩阵方程(1.1)的perhermitian解。
定理3.3 算法3.1中残量范数具有以下性质
证明:
□
定理3.3表明,如果
且
,那么
是严格单调递减的,所以算法3.1是收敛的。
3.3. 最小范数Perhermitian解
接下来考虑Sylvester矩阵方程组(1.1)的最佳逼近perhermitian解,即最小范数perhermitian解。
引理3.1 [19] [24] [25] [26] 设线性矩阵方程
有解
,其中
表示
的列空间,则
是
的唯一最小范数解。
定理3.4 设矩阵方程组(1.1)是相容的,初始值取
,
,
,其中
和
为任意的
矩阵,特别地,取
,
,S是适当维数的反射矩阵。如果矩阵方程组(1.1)有perhermitian解,那么算法3.1经过有限步迭代求出的解是矩阵方程(1.1)的唯一的最小范数perhermitian解
,
。
证明:根据Kronecker积,将
改写为
因此,如果通过上述选择
,那么通过算法3.1得到的
满足
,其中
表示
的列空间。由引理3.1可知,如果
,
,作为初始解,
特别是
,
,那么可以通过算法3.1来求解矩阵方程组(1.1)的唯一最小范数perhermitian解。
□
4. 数值算例
在这个部分,我们给出两个算例来说明所提出的算法的有效性。当
时,停止迭代,并且
被视为矩阵方程组(1.1)的唯一最小范数perhermitian解。
例4.1 给定Sylvester矩阵方程为
其中
求其唯一最小范数perhermitian解。
选取初始矩阵
根据算法3.1,经过24步迭代终止,得到该矩阵方程的唯一最小范数perhermitian解:
并且,相应残差的范数
。
例4.2 给定Sylvester矩阵方程组为
,
其中
求其唯一最小范数perhermitian解。
选取初始矩阵
根据算法3.1,经过19步迭代终止,得到该矩阵方程的唯一最小范数perhermitian解:
并且,相应残差的范数
。
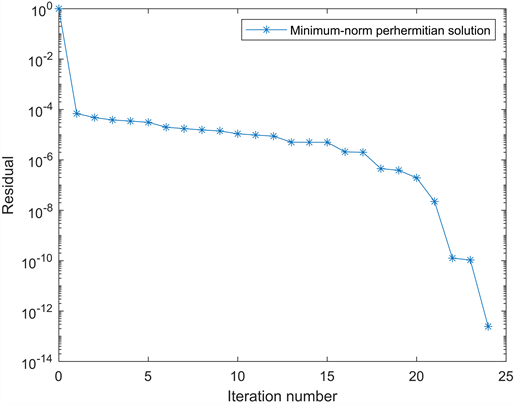
Figure 1. Convergence curves for Example 4.1
图1. 例4.1的收敛曲线

Figure 2. Convergence curves for Example 4.2
图2. 例4.2的收敛曲线
上述两个例子表明,我们的方法能够有效的获得Sylvester矩阵方程组的唯一最小范数perhermitian解。此外,从图1和图2可以看出,算法在数值上是非常可靠的。
5. 总结
在本文中,我们利用BCR算法来求解Sylvester矩阵方程组(1.1)的perhermitian解。我们证明了算法是收敛的,在不存在舍入误差的情况下,可以在有限步内得到唯一的最小范数perhermitian解。最后,通过两个算例说明了算法的可行性和有效性。
NOTES
*通讯作者。