1. 引言
柔性机械手具有良好的人机交互性和传统刚性机械手所欠缺的自身适应能力,因此成为机械手研究领域的主流 [1] [2] [3] [4] 。Raphael Deimel [5] 等研究出了一款具有多自由度的拟人柔性机械手,可以通过控制气体流量大小来对柔性手指的弯曲程度进行控制,使得柔性机械手能够自由灵活地抓取物体。Huichan Zhao [6] 等研制出了一款气动柔性机械手,可以利用光波探测物体,同时能够感知到所触物体的形状和材质,可用来处理较为精致的物品。Song Kah-Ye等人研制了一种基于触觉反馈的气动执行器,其驱动力由静电力产生的内部气压提供 [7] [8] [9] 。Wang Wei等人研制了一种基于SMA (Shape memory alloys,形状记忆金属)材料的智能软复合铰链致动器 [10] 。文力团队研究出了一种拥有四指结构的柔性夹持器 [11] ,可对大部分形状复杂和易损物品的有效抓取。刘晓敏团队研究出了一款气压驱动的软体机械手 [12] ,该软体机械手具有多自由度的特点,能够模拟人手做出各种动作,同时能够适应各种形状、不同刚度的物体。
本文探索设计一种腔室外置结构柔性机械手指,建立柔性机械手指弯曲变形模型分析腔内气压与手指变形的关系;制作柔性机械手指,并通过柔性手指弯曲变形试验测量其在不同压力下的弯曲变形、末端的位移和输出力。
2. 柔性机械手的设计与制备
本文中的柔性机械手指由11个腔室组成,结构如图1所示。在11个腔室中,首尾的2个腔室外侧腔室壁厚加厚,以实现固定和抓取功能;其余9个腔室均采用上表面壁厚大于左右2个侧面壁厚。在腔室切槽位置的下方,有起连接作用的小凸台,并留有通气凹槽,便于各个腔室间气体流动。应变限制层选用具有可弯曲但不可延展的材料,本文选用多功能复印纸作为限制层材料。底部的可弯曲层为中间约束层的载体且起密封作用,不影响顶部腔室和中间应变限制层形变,故底部可弯曲层尺寸、材料与腔体下表面尺寸、材料相同。结构参数含义如图2,结构参数值如表1。
本研究采用3D打印技术制作柔性机械手指模具,制备过程如文献 [13] ;制备的柔性机械手指如图3。
 1. 腔室结构;2. 应变限制层结构;3. 可弯曲结构;4. 凸台;5. 空气传输通道。
1. 腔室结构;2. 应变限制层结构;3. 可弯曲结构;4. 凸台;5. 空气传输通道。
Figure 1. Schematic diagram of the structure of flexible mechanical finger
图1. 柔性机械手指结构示意图
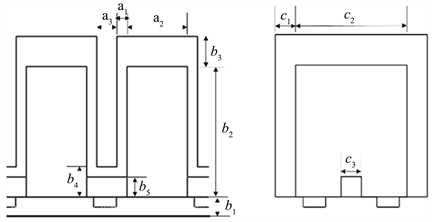
Figure 2. Schematic diagram of the parameters of each part of the flexible mechanical finger chamber
图2. 柔性机械手指腔室的各部分参数示意图

Figure 3. Physical diagram of flexible mechanical finger
图3. 柔性机械手指实物图

Table 1. Parameter values for each part of the flexible mechanical finger chamber
表1. 柔性机械手指腔室的各部分参数值
3. 柔性机械手指弯曲变形理论分析
柔性手指的变形量主要取决于限制层上下两层的伸长量差异,产生由气体驱动的形变转化为限制层方向的弯曲 [14] 。柔性手指的每一个腔室结构相同,腔室与腔室之间的距离较小,可以忽略不计,柔性手指的弯曲变形等于各个腔室的弯曲变形之和,即
等于
,如图4所示。
假设柔性机械手指不考虑其自重,硅胶不可压缩;在没有外力作用的情况下,压缩空气所做的功将完全转化为空腔形变的能量,则压缩气体所做功与柔性手指形变能量间的关系:
(1)
式中,P为空腔的气压,Va为发生形变后的空腔体积,Vr为发生形变后的硅胶体积,U为应变能。
由于硅胶视为不可压缩材料,硅胶发生形变前后体积保持不变,由此可得:
(2)
故发生形变后的空腔体积
,V为发生形变后空腔的总体积,则有:
(3)
式中
为空腔长度方向的主伸长率,
,R为柔性手指弯曲的曲率半径。将(1)式对
求导,联合
、
的表达式可得出单个空腔压缩空气的输入气压与弯曲角度的关系:
(4)
因ai、bi、ci如表1,且Vr已知,
可看作
的函数,故该式只有P和
两个未知数。本文采用Yeoh本构模型开展研究,其应变能函数是典型的二阶式
,其中的C10、C20,
。依据GB/T528-2009制作试样,开展拉伸试验,对测得的数据进行回归分析 [13] ,C10为0.2352,C20为0.0890。
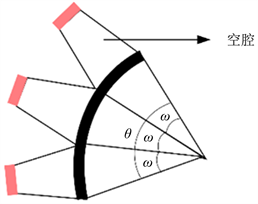
Figure 4. Schematic diagram of bending theory analysis of flexible mechanical fingers
图4. 柔性机械手指的弯曲变形示意图
4. 柔性机械手指弯曲变形试验
4.1. 试验平台硬件选择与系统组建
柔性机械手指弯曲变形试验系统由直流隔膜泵、粗过滤器、降噪器、二位三通电磁阀、IR精密调压阀、节流阀、自锁开关等组成。
4.2. 柔性机械手指末端的力学性能
4.2.1. 柔性机械手指末端位移试验
将柔性机械手指进气端固定,向手指分别充入−20、−10、0、10、20、30、40、40、50、60 KPa的压缩气体,在不同气压值下手指另一端运动停止时的位置如图5。当柔性机械手指腔室内为负压时,柔性机械手指弯向腔室一侧;当柔性机械手指腔室内压力为零时,柔性机械手指不变形;当柔性机械手指腔室内为正压时,柔性机械手指弯向限制层一侧,并且弯曲变形程度随着压力的增大而增大。
依次测量不同气压值下的柔性手指位置,得到柔性手指末端点的运动轨迹,如图6所示。柔性机械手指腔室内压力为−20~60 KPa时,水平方向的位移范围为−3.3~7.6 cm,垂直方向位移范围为0~11.4 cm;柔性机械手指腔室内压力为0时,水平方向位移和垂直方向位移为0。
如图7,不同气体压力下,经公式(4)进行理论计算得到的柔性机械手指末弯曲角度与实际测量得到的弯曲角度趋势相同;但有一定的误差,误差值约为5%。分析原因可能如下:(1) 在制作柔性机械手的过程中,液体硅胶在静置固化的过程中没有把气泡完全排除,由于气泡的存在使得柔性机械手表现出非匀质特性;(2) 由于模具精度和制备工艺的影响,柔性机械手指的长度、半径、壁厚等各项模型参数与理论模型存在误差,且在实际试验的气压回路中,由于气密性的影响,气压不稳定且有损失 [15] 。
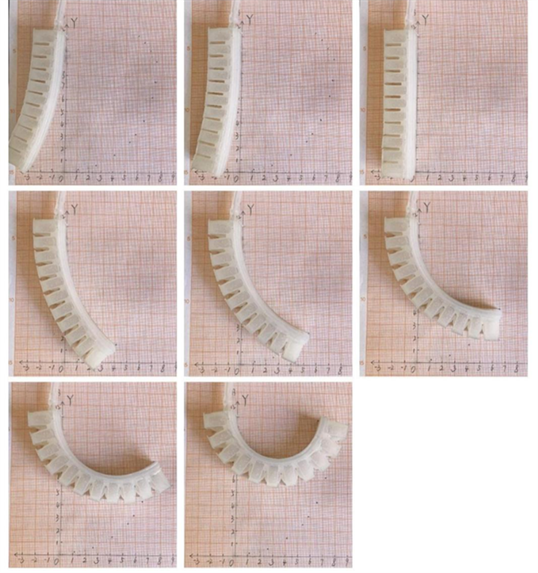
Figure 5. Deformation of flexible mechanical finger under different air pressures
图5. 柔性机械手指不同气压下的变形
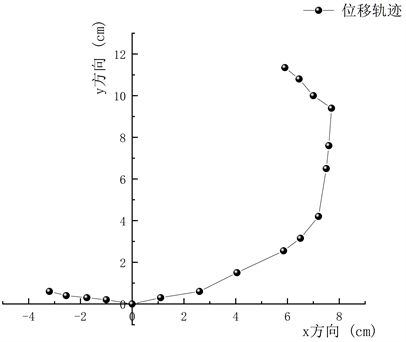
Figure 6. The trajectory of the flexible mechanical finger end
图6. 柔性机械手指末端轨迹图
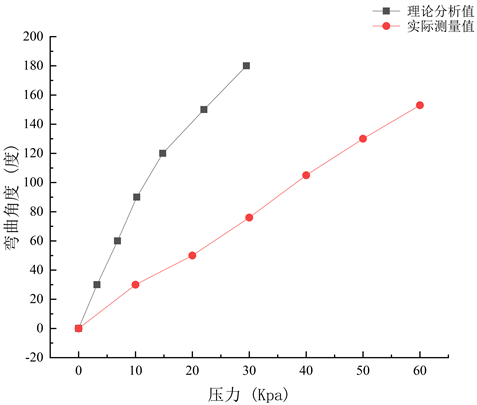
Figure 7. Theoretical and measured values of bending deformation of flexible mechanical finger
图7. 柔性机械手指弯曲变形的理论值和测量值
4.2.2. 柔性机械手指末端输出力试验
柔性机械手指末端输出力的大小决定着其负载能力,手指末端输出力如图8。在手指腔室内气体压力相同时,手指末端输出力随着角度的增大而变小;如气体压力为60 KPa时,弯曲变形为0˚时的输出力最大为0.58 N;弯曲变形为75˚时的输出力最小为0.03 N。在手指弯曲角度相同时,手指末端输出力随着压力的增大而增大;如弯曲变形为15˚时,气体压力为20 KPa时的输出力最小,为0.12 N;气体压力为60 KPa时的输出力最大,为0.5 N。
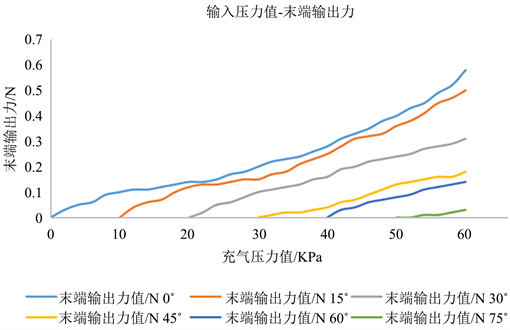
Figure 8. The output force of the flexible mechanical finger end
图8. 柔性机械手指末端输出力曲线
5. 结论
设计了一种多腔室气压驱动的柔性机械手指,利用3D打印技术制备柔性机械手指模具,用硅胶制备柔性机械手指。通过拉伸试验得到了硅胶材料的应变能密度函数的模型参数C10和C20,分别为0.2352、0.0890,建立了柔性机械手指弯曲变形模型;搭建了柔性机械手指弯曲变形试验装置,开展了柔性机械手指在不同压力下的弯曲变形和手指末端的位移、输出力试验。试验结果表明:柔性机械手指水平方向的位移为−3.3~7.6 cm,垂直方向位移范围为0~11.4 cm;柔性机械手指输出力为0~0.58 N。进行理论计算得到的柔性机械手指末弯曲角度与实际测量得到的弯曲角度趋势相同;但有一定的误差,误差值约为5%。
基金项目
2023年大学生创新创业训练计划立项项目(202310148025)。
参考文献