1. 引言
在碳中和的愿景下,未来的能源发展目标将以“新能源”和“智能能源”体系为主,具有智能化、清洁化和高效化的能源体系特点。为此,许多国家已将太阳能等可再生能源作为2030年以后能源供应安全的重点 [1] 。为此我国也在《全国重要生态系统保护和修复重大工程总体规划(2021-2035年)》(以下简称《双重规划》)中,将新能源作为七大战略性新兴产业之一,未来将重点发展核电、风电、太阳能和生物质能四大产业 [2] 。
而太阳能作为一种清洁无污染的能源,有着巨大的开发前景。我国的太阳能资源非常丰富,每年接收到的太阳辐射能约为50 × 1015 MJ。其中青藏高原地区的太阳辐射总量最大,因而,发展太阳能对于我国西部地区的经济和社会发展具有重要的现实意义 [3] [4] 。
早在1979年美国就研制出一种单轴线的引力型太阳能追踪器。这种追踪装置结构简便,成本较低,但是其追踪距离较短,追踪准确率较低。随后,捷克,美国等相关人员各自研发出太阳能追踪仪装置 [5] [6] ,受限于结构尺寸、精度等因素,效率提升有限。
2015年,Fevzi Kentli等人 [7] 设计了一种新型的光敏电阻式太阳能双轴自动追逐装置,利用该装置在不同的光照条件下,通过对其进行调整,使其在阳光照射下的位置与其相匹配,使其光伏转化效率提升30%。
随后,太阳能跟踪技术的发展也促进了各种形式的跟踪设备的产生,Fábio Moacir Hoffmann使用LDR来确定太阳的方位,并调整引擎的两个轴心的追踪者,从而实现了每个月的太阳能收入的增长,分别达到了20%和31.1% [8] 。另外,日本,瑞士,法国等国家也在对太阳辐射进行观察时,使用了自动化的太阳追踪设备。
我国对日面追踪的研究起步较晚,2008年推出的压差型追踪系统,因其结构简单,操作简便,可根据日晒条件下的不同部位的电压变化,可实现对日晒的实时追踪,但因其无法全天追踪日晒,每日需人工调节一次,无法满足规模化生产的要求 [9] 。在同一年,南航和上交也研制出了以PSD为基础的高精密太阳能追踪仪,均以强度探测为基础的 [10] [11] 。
重庆大学于2012年成功研制出一种由反射镜、支撑结构、轨迹驱动系统等构成的槽型太阳能集热器系统,可为公司的产品设计、优化及技术改造等方面应用 [12] ,也可为该公司的具体生产实践提供借鉴与指导,并对公司的生产实践中遇到的问题提供有效的技术支持。
基于上述理论,近几年也有许多不同类型的跟踪装置问世。2019年,封居强团队 [13] 根据四象限原理,提出了一套两轴线精密追踪系统,其光电转换效率较静止型太阳电池提升32.4%,解决了传统追踪型太阳电池效率较静止型太阳电池效率较静止型太阳电池效率降低32.4%的难题。朱永强等 [14] 于2021年根据其几何联系,导出了一种新的单轴线追踪模式,并将其与常规单轴线追踪模式进行了对比,并对其进行了数值模拟和计算。横向单轴线追踪模式比横向单轴线追踪模式有22.7%的改善,全年辐射总量比横向单轴线追踪模式有97%~99%的改善。王青峰 [15] 于2022年将视日行迹追踪与光电追踪相结合,以光线聚集装置为核心,采用单片机及其它微处理机,研制出一种集日行迹追踪与光电追踪于一体的集日行迹追踪装置。
本文基于双轴视日的基础上,针对太阳能装备受恶劣天气破坏严重的问题,开展了设计研究,基于流固耦合分析构建兼顾发电功率和装置使用寿命的优化模型,为小型光伏装备的开发设计提供新的思路,具有良好的市场前景与应用价值。
2. 方案选择与理论分析
由于,太阳能板的倾角会影响太阳的入射角,导致其接收到的太阳辐射量不同,如公式(1)所示:
(1)
其中,
为倾斜光伏阵列面上太阳能总辐射量,S为水平面上太阳直射辐射量,D为散射辐射量,
为太阳高度角,
为太阳能板倾角。
发电量如公式(2)所示:
(2)
其中,G为单位面积太阳能电池板发电量(kW∙h/m2),
为月平均辐射量(MJ/m2),
为发电效率。
因此,为了提高太阳能的发电效率,一些学者对太阳能自动跟踪系统做出了一系列的研究并提出相应的设计方案。
2.1. 跟踪方案选择
目前,太阳能自动跟踪系统按照控制系统跟踪方式的不同可以分为:视日轨迹跟踪系统、光电跟踪系统和基于数字图像处理的跟踪系统 [16] 。本文采用视日跟踪和光电跟踪的混合跟踪方法,在一级采用视日跟踪方法的同时为避免视日运动轨迹跟踪的误差累计问题,采用二级光电池传感器进行跟踪进行校正。提高了太阳能的追踪精度的同时又避免了死区和天气对追踪造成的影响。
2.2. 视日最大功率追踪
由于太阳直射点在南北回归线之间运动,为更好的视日追踪,增大入射角提高接受辐射量,故假设以观察者为球心,半径为无限长的球体为天球,通过高度角
与方位角
来实现太阳位置的确定 [17] [18] [19] [20] 。
由于赤纬角
是确定太阳高度角
与方位角
重要参数,且多位学者中Spencer算法误差小、精度高、过程相对简单 [20] ,因此本文选用Spencer算法作为计算太阳赤纬角的近似算法如公式(3)所示:
(3)
其中,
,
,
,
,
,
,
,
为日角如公式(4)所示:
(4)
其中,n为积日。
太阳高度角
指太阳光的入射方向和地平面之间的夹角,它与太阳赤纬角
、时角
的关系式如公式(5)所示 [21] :
(5)
其中,
为太阳高度角,
为太阳时角,
为当地纬度,
为太阳赤纬角。
太阳方位角
是指太阳光线在水平面上的投影和当地子午线的夹角关系式如公式(6)所示 [22] :
(6)
其中,
、
、
、的含义与公式(5)中相同,
为太阳方位角。
太阳时角计算如公式(7)所示:
(7)
其中,
的含义与公式(5)中相同,ST为真太阳时与该地时间、经度、时差相关 [23] [24] 。
2.3. 风产生的应力
同时太阳能板还受到其他外界因素影响如温度、太阳能板板面的灰尘、风力等,而本文主要研究风力对太阳能板与太阳能板支撑结构造成的干扰,根据空气阻力的计算如公式(8)所示:
(8)
其中,CD为空气阻力系数,
为空气密度(取1.29 kg/m3),V为物体与空气的相对运动速度,S1物体迎风面积。
迎风面积S1如公式(9)所示:
(9)
其中,S2是太阳能板实际大小,
与公式(5)中相同,
与公式(6)中相同,
是风向角。
取雷诺数
,由于
故空气阻力系数CD如公式(10)所示:
(10)
因此,风产生的应力的大小受视日追踪时的角度变化而影响,当视日追踪遇到恶劣天气会对机构造成严重破坏,导致机构疲劳失效。
3. 控制方案与程序
机械部分采用双轴跟踪方法,为实现对太阳光的高度角和入射角的调节,如图1所示。
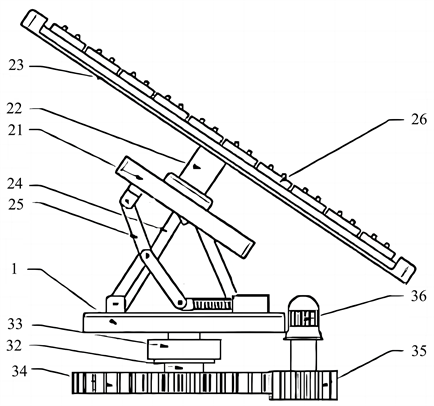
Figure 1. Horizontal rotating mechanical mechanism
图1. 水平转动机械机构
水平转动机械机构通过一对齿轮啮合的方式传动,使太阳能板能在水平方向360˚的旋转。同时为实现高效传动时避免和减小因加工和装配带来的同轴度误差,电机通过弹性联轴器与转轴连接,而且转轴的轴向采用推力球轴承固定和辅助转动,以达到减小整体机构的摩擦的目的。如图2所示,垂直转动机械结构通过电机伸缩杆推拉一组四杆机构传动,使太阳能板能在垂直方向90˚的旋转,同样为较少摩擦转轴部分采用与水平结构相似的方法利用轴承固定和辅助转动。同时电机的转动通过程序控制,防止转角超限损坏机械结构。
控制部分系统原理如图2所示,利用PLC控制,在太阳能板两侧同一水平线上放置两个光敏传感器,以减小视日轨迹跟踪时计算的误差,可根据各地情况手动设定传感器二者差值的阈值,当在阈值范围内时,程序根据视日轨迹自动跟踪。当超出阈值时,程序通过传感器修正太阳能板姿态使之回到阈值范围内,之后继续根据视日轨迹跟踪。
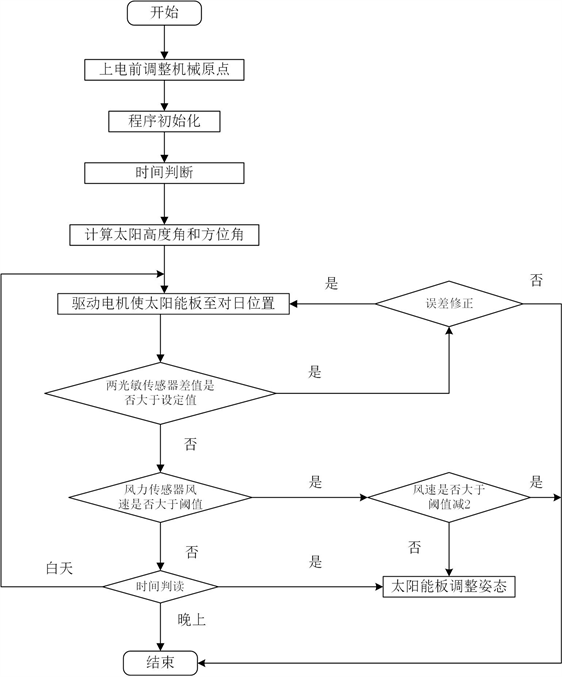
Figure 2. Track control system program flow chart
图2. 跟踪控制系统程序流程图
PLC控制电机以调整太阳能板各角度,在保持高效追光发电的同时以减小风对系统的损坏。当风速超出阈值时,PLC再次控制电机调整太阳能板各角度,兼顾视日轨迹跟踪和自保护机构,待风速重回阈值内再开始视日轨迹跟踪。同时在PLC中添加一些辅助传感器用于采集追踪系统的状态信息如:安装位置(经纬度)、当前时间(月、日、时、分、秒)、温度等。
4. 流场建模、仿真分析与优化
太阳能电池板工作过程中受到风载作用,计算流体域进行建模时,计算域的尺寸选择为:2 m × 1 m × 1 m;边界条件设置为:根据风速风向统计结果取平均风速10 m/s对应风速风级表约为5级,根据与计算域入口实验廓线相似的开阔地形的大气湍流模型,设置湍流强度20%,底部应用防滑粗糙墙,面板表面、支撑结构以及域的侧面和顶部应用防滑光滑墙,出口区域应用零压力梯度 [25] ;为更有效的调查风效应对地面安装的太阳能电池板倾斜角度的影响,选取面板倾斜角度为30˚、45˚和60˚三种方案进行仿真分析。
4.1. 压力场分析
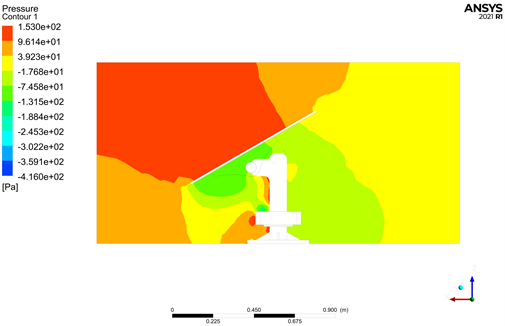
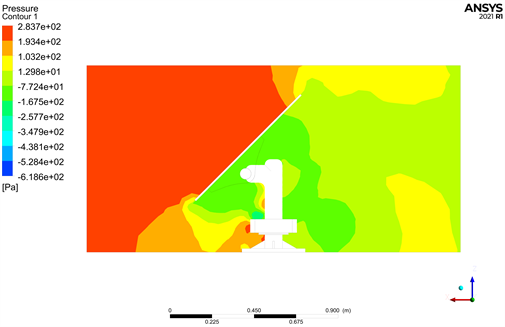
如图3,当倾角为30˚放置时板前板面最大压力为153 Pa,倾角为45˚放置时板前板面最大压力283.6 Pa。倾角为60˚放置时板前板面的压力最大为455 Pa,较倾角为30˚放置时压力增长约297%,较倾角为45˚放置时压力增长约160%,因此不难看出当风向风速相同时倾角越大板前板面的压力也越大,底座的冲击越强。
从压力数值上看三种放置方法均在流场中产生了负压力系数,这是由于风流撞击太阳能电池板前缘而后分离,由于支撑柱的存在,风在电池板背风侧形成两个漩涡,向上分离的气流到达后缘后,在太阳能板下表面形成一个逆时针旋转的大回流区。因此导致面板迎风面出现正压力系数,背风面出现负压系数,尤其是在倾角为30˚和45˚放置时这一现象表现的十分明显。
从截面的压力面积上看,倾角为45˚放置时倾角的太阳能板板面高压面积最大约为倾角30˚放置时的1.5倍,而倾角为60˚放置时的大约为倾角30˚放置时的2倍。为进一步说明度负压力产生原因与倾角为30˚放置时产生较大正压力这一现象,接下来通过对速度的深入分析,提供进一步的解释。
30˚
 45˚
45˚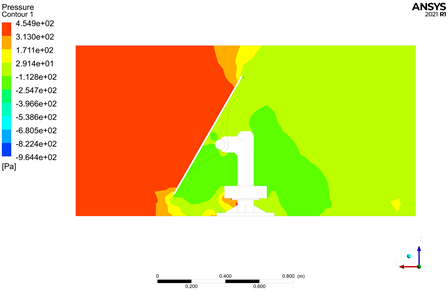 60˚
60˚
Figure 3. 30˚, 45˚, 60˚ solar panel surface air pressure
图3. 30˚、45˚、60˚放置时太阳能板面空气压力
4.2. 速度场分析

30˚
 45˚
45˚ 60˚
60˚
Figure 4. Air velocity vector diagram of solar panel surface at 30˚, 45˚ and 60˚
图4. 30˚、45˚、60˚放置时太阳能板面空气流速速度矢量图
为进一步说明压力分析时不同倾角产生的压力产生的大小与负压力的产生的原因下面对太阳能板进行速度分析,在初始风速和风向都相同的条件下对比截面上的速度矢量图如图4所示,可明显看出倾角为30˚放置时太阳能板板前的最大速度20.17 m/s,倾角为45˚放置时太阳能板板前的最大速度23.63 m/s,较倾角为30˚放置时速度增长约117%,倾角为60˚放置时的太阳能板板前的风速最大达到26.31 m/s,较倾角为30˚放置时速度增长约130%,较倾角为45˚放置时速度增长约111%,这与压力分析时的表现的规律一致。
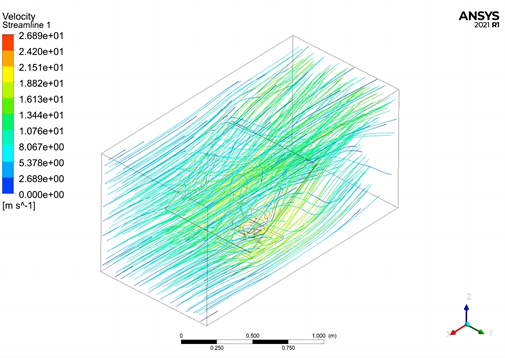
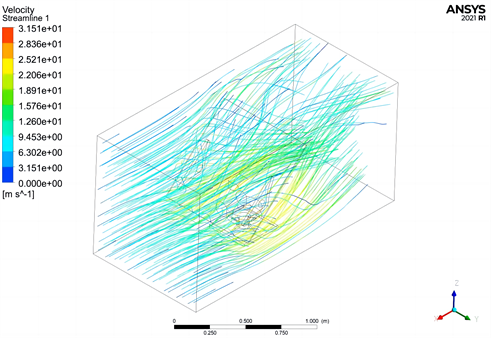
而如图5的流线图所示,倾角为60˚放置时的太阳能板板后几乎阻滞了风场流过,倾角为30˚放置和倾角为45˚放置时太阳能板板后均有风场,且倾角为30˚放置比倾角为45˚放置时太阳能板板后风场流线密,这与压力分析时观察到的规律一致。
30˚
 45˚
45˚ 60˚
60˚
Figure 5. Air velocity flow diagram of solar panel at 30˚, 45˚ and 60˚
图5. 30˚、45˚、60˚放置时太阳能板面空气流速流线图
4.3. 优化设计
由于倾角为60˚放置时板前压力最大,为保持变量取风速10 m/s,板后支撑材料为铝合金,为满足强度要求同时减少成本,查表选择6061铝合金抗拉强度205 Mpa,屈服强度55.2 Mpa,弹性系数68.9 Gpa,取屈服强度55.2 Mpa进行后续仿真优化, 仿真结果如图6所示。
由风速10 m/s对应风速风级表约为5级,故倾角为60˚放置时流固耦合仿真在风速5级的情况下,太阳能板形变最大为0.545 mm,后杆支撑整体形变与应力分别为0.148 mm与5.35 MPa,俯仰调节杆由于受太阳能板阻挡影响整体形变与应力较小分别为0.221 mm与1.78 MPa,因此无论是形变量还是应力均较小,远小于屈服强度55.2 MPa,但图中仍可看到明显的变形。因此,对于风级的极限值,即10级,需要进行进一步的优化设计。
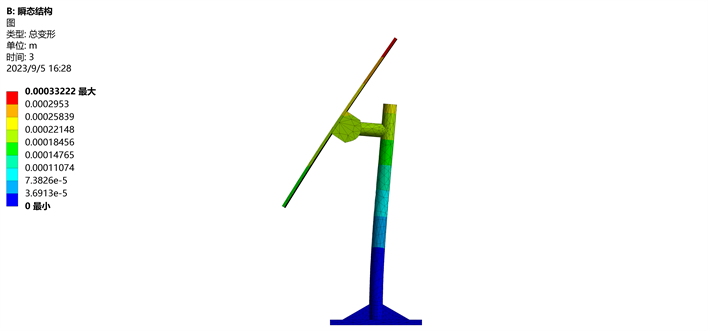

Figure 6. The result of fluid-structure coupling when the dip Angle is 60˚
图6. 倾角60˚放置时流固耦合结果
因此,通过上述2.1、2.2公式关系利用MATLAB得倾角与应力关系,进行优化仿真,取一年中春分、夏至、秋分、冬至作为时间样本,西安(东经107.40˚~109.49˚和北纬33.42˚~34.45˚故取东经108˚北纬34˚)作为西部地区地理位置样本,根据风速风向统计结果,西安地区风向以E风向(33.719%)和WSW风向(14.459%)为主,取太阳能板面为
。

Table 1. Changes in the optimal solar altitude angle during tracking at different seasons
表1. 不同时节跟踪时太阳最优高度角变化
Table 2. The stress generated by different wind directions under the change of optimal altitude angle change
表2. 在最优高度角变化下不同风向风级产生的应力大小
根据表2的数据,E风向应力明显高于WSW风向,故先校核E风向,满足屈服强度55.2 Mpa,再校核WSW风向,据表1得出的各时节最佳倾角变化范围。春分E风向十级风17~18时不满足,WSW风向全时段满足,故综合最佳倾角变化为[−16.42˚, 6.59˚]。夏至E风向十级风几乎全时段均不能满足故机构中断自保护,但WSW风向时全时段满足,故综合最佳倾角变化为[−30.79˚, −20.05˚]。秋分E风向十级风11~13时不满足,但WSW风向全时段满足,故综合最佳倾角变化为[−17.49˚, 19.06˚]。冬至十级风无论E风向还是WSW风向均不能满足,故机构中断自保护。
综上所述,取平均风力5级风的条件下进行了流固耦合仿真。结果显示,应力满足设计要求,但图中形变明显。因此,在后续Matlab研究分析在,在保证发电的情况下,结果表明通过调整太阳能板的角度可以使最大应力下降46.05%,且随着风力增大,角度调整下降幅度更为显著,同时不同风向和风力对应的倾角也不同,但在不考虑太阳能板板面旋向的情况下基本角度集中于初始位置放置时[0˚, 20˚]之间变化。
5. 结论
本文提出一种基于PLC控制的太阳光追踪系统,旨在提高太阳能跟踪系统的运行稳定性和追踪精度。该系统采用视日运动轨迹追踪方式作为主要跟踪方式,光电追踪方式作为辅助误差调整方式,实现了跟踪方法的分级控制,以充分利用它们各自的优势。具体研究工作包括:
(1) 选择PLC作为核心处理器,详细阐述了视日运动轨迹追踪方式的理论基础和太阳位置算法。最终确定采用视日运动轨迹追踪方式作为主要跟踪方式,光电追踪方式作为辅助误差调整方式。
(2) 自主设计了太阳能双轴跟踪系统,确定了各个结构的尺寸以实现设计目标。通过计算仿真,得出了板面运动和周转运动的轨迹方程,并在不同倾角下进行了板面压力和速度的理论计算和对照实验,结果表明倾角为45˚时板面受压情况较好。
(3) 进行了流固耦合仿真实验,以研究跟踪装置在风场下的应力、变形和对风场的交互作用影响。结果显示,在取风力为5级的条件下应力满足设计要求,但仍存在明显形变。通过Matlab分析优化,调整板面角度,可以有效减少最大应力,且风力越大效果越显著,在不考虑太阳能板板面旋向的情况下,倾角基本集中于初始位置放置时的[0˚, 20˚]之间变化。
基金项目
国家自然基金面上项目(51775260),江苏省大学生创新创业项目(202211276030Z)。
参考文献
NOTES
*通讯作者。