1. 引言
在食品、药品等行业的现代化包装中,贴标机已成为商品标签自动化粘贴不可或缺的设备 [1]。送标器是贴标机的核心部分,负责将商品标签送达目标位置并粘贴。目前,采用擦贴法的卷轴式不干胶标签送标器,因其出标速度快、贴标位置准确等优点,被广泛应用于各种贴标设备中 [2]。卷轴式送标器本质上是一套卷绕系统,要求保证送标过程中的张力稳定,否则:张力过大会造成标签带形变甚至断裂,张力过小会存在无法有效揭标或漏标等问题。
针对类似于送标器的非线性、时变、强耦合的卷绕系统 [3] [4],国内外学者提出过不同的张力控制方案。Hwang H等 [5] 为了提高卷绕系统的鲁棒性,采用了前馈控制器 + 干扰观测器(DOB)的方式控制张力,还利用了卡尔曼滤波器处理反馈信号。Chu X等 [6] 为解决卷绕加速过程的张力波动,利用泰勒展开法建立的加速阶段的动力学模型,引入了区间变量来表示时变和不确定参数,并在此基础上设计了鲁棒控制器。Raul P R等 [7] 讨论了MRA-PI和基于继电器反馈技术的间接自适应PI控制器两种张力控制方案的特点,并与固定增益的PI控制进行了对比实验,得出了间接自适应PI控制器更适合自动化应用的结论。马海豹等 [8] 利用遗传算法在线调整自抗扰控制器参数,实现了分切机收卷过程的张力自适应调节,相较于PID控制,该控制器能够有效提高系统鲁棒性与收卷质量。
为了进一步提高卷绕系统张力的控制精度与抗干扰能力,本文以送标器为控制对象,采用了调节灵活性高、鲁棒性好的分数阶PID (Fractional-Order PID)控制器调节张力 [9]。引入了改进鲸鱼优化算法(Improved Whale Optimization Algorithm)整定分数阶PID的五个参数,并根据建立的数学模型设计了非线性干扰观测器(Nonlinear Disturbance Observer),以达到在保证系统快速响应的同时最大程度抵消干扰。使用MATLAB软件对系统进行了仿真实验,验证了控制器的良好性能。
2. 控制系统分析与建模
2.1. 送标器张力控制方案
送标器的本质上是一个由松卷端和收纸端组成的收放卷系统,两端的线速度差是张力产生的原因。张力控制本质上是速度控制,但难以实现直接控制两端速度差恒定 [10]。所以,一般在中间加入主动辊(或称牵引辊),将卷绕系统分隔两部分,一端负责控制张力,另一端负责控制速度。张力闭环控制方案如图1所示。卷绕系统张力通过控制松卷辊转速来调节;而主动辊与收纸辊负责线速度控制,它们之间的卷带较短,可以通过缓冲辊自动适应张力变化。
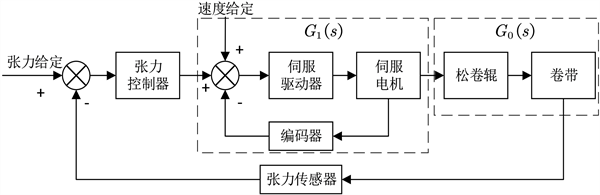
Figure 1. Tension closed loop control scheme
图1. 张力闭环控制方案
2.2. 张力控制系统建模
张力控制部分简化结构如图2所示,图中ω为松卷辊转速,R为标签卷半径,T为卷带张力,V0为松卷端线速度,V1为主动端线速度。
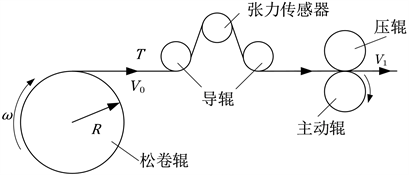
Figure 2. Simplified structure of tension control part
图2. 张力控制部分简化结构
假设卷带在拉伸的过程中发生了纯弹性形变,且与辊之间有足够的摩擦,忽略温度对卷带形变的影响,由胡可定律可得:
(1)
式中,A表示卷带的横截面积(m2);
表示卷带所受到的应力(N);E表示卷带的弹性模量(GPa);
表示卷带产生的应变。根据文献 [11],对应变
求导可得:
(2)
式中,L为松卷辊到主动辊之间的卷带长度(m),假设主动端线速度V1为常数。对(2)式进行拉式变换并整理:
(3)
对(1)式进行拉式变换并将(3)式代入整理可得:
(4)
一般情况下,转速
随时间的变化率要远远大于卷径R随时间的变化率,且送标器是间断式工作的,所以可以认为在一个工作间隔内的R为定值。由此有:
,则图2中卷带张力的传递函数
为:
(5)
通过向伺服驱动器输入速度阶跃信号,观察电机速度响应曲线的方式,可以将张力控制方案中伺服控制部分的传递函数
辨识为一个一阶惯性系统 [12] :
(6)
式中,Ti为时间常数(s)。综合式(5)、(6)可得张力控制系统的开环传递函数为:
(7)
将上述传递函数转换成状态空间方程:
(8)
式中,
;
;
。
3. 张力控制器设计
3.1. 控制器结构
为了更为精准的控制卷带张力,采用分数阶PID控制器作为控制器核心。但分数阶PID比传统PID更难调参,因此引入改进鲸鱼优化算法IWOA代替人工整定参数。为了兼顾调节时间和超调量,选用ITAE评价指标作为IWOA的适应度函数,该函数表达式为:
(9)
式中,
为张力给定值与反馈值之间的差值,Tu为积分时间。
送标器间断工作意味着需要频繁启停,这非常容易在系统中产生瞬态干扰,加上传感器的测量噪声,整个卷绕系统几乎时刻处在干扰之中。为了提高系统的鲁棒性,根据控制对象的状态空间方程,设计了用以补偿系统干扰的非线性干扰观测器NDO。控制器结构框图如图3所示,下文将对控制器的各个部分作详细说明。
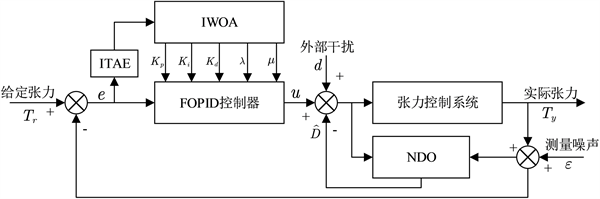
Figure 3. Structural block diagram of controller
图3. 控制器结构框图
3.2. 分数阶PID控制器
1999年,Podlubny [13] 基于分数阶微积分Capotu定义提出了
控制器,其传递函数形式为:
(10)
式中,
与
均大于零,范围一般在[0, 1]。该控制器在时域中的输出为:
(11)
控制器在积分与微分部分增加了可以调节阶次的功能,相比于传统PID,它继承了分数阶微积分的特点,赋予了控制器更宽泛、梯度更小的调节范围,适合高精度调控的环境。但由于非整数阶次的存在,在工程应用中需要找到合适的滤波器近似分数阶微积分方程,才能设计出实际意义上的
控制器。在众多近似方法中,Oustaloup滤波器使用的最为普遍。标准Oustaloup滤波器的近似方式为:
(12)
式中,N是滤波器阶次。该式零点为:
,极点为:
,增益
;其中
,
和
为函数拟合的频率范围上下限。但标准Oustaloup滤波器存在边界近似效果较差的问题,因此使用文献 [14] 提出了一种改进型Oustaloup滤波器:
(13)
(14)
式中,参数b和d的建议取值为10与9。
3.3. 非线性干扰观测器设计
在考虑扰动的情况下,(8)式可以表示为:
(15)
式中,
;
;
;
;包含外部干扰d与测量噪声
的
。根据(15)式设计的NDO形式如下:
(16)
式中,
,
、
为观测器增益,均大于0。假设观测器观测的干扰误差为:
(17)
一般认为干扰 随时间的变化量趋近于零 [15],即
。因而有:
(18)
根据(15)、(17)式,可得:
(19)
为了证明上述NDO稳定,选取李雅普诺夫函数
。由于:
(20)
所以,根据李亚普诺夫第二方法,证得该观测系统将稳定于
处,能够达到干扰观测效果。
3.4. 改进鲸鱼优化算法
3.4.1. 鲸鱼优化算法
受座头鲸捕食鱼群行为的启发,Mirjalili [16] 等学者于2016年提出了新型智能群优化算法:鲸鱼优化算法(Whale Optimization Algorithm, WOA)。该算法内容如下:
1) Encircling prey (包围猎物)
在最优解先验未知的情况下,将鲸鱼群中最优个体位置视为假想的最优解位置,并更新其他个体位置到该位置,即向最优解聚集。位置更新方式为:
(21)
式中,t为当前迭代次数;k为个体序号;Xb为当前最优解个体位置。需要注意的是,仅当
时才选择该种方式更新位置。A与C根据下式计算:
(22)
(23)
(24)
式中,
表示范围属于[0, 1]的随机数;
表示最大迭代次数。
2) Bubble-Net Attacking Method (气泡网攻击)
座头鲸的气泡网攻击行为可以分为两种策略:Shrinking Encircling Mechanism (收缩包围)和Spiral Updating Position (螺旋式位置更新),两种策略分别有50%的概率执行。具体可以由以下等式表述:
(25)
(26)
式中,b是与对数螺旋形状相关的常数;l是范围属于[−1, 1]的随机数;p是范围在[0, 1]的随机数,A与C的定义与Encircling Prey一致。
3) Search for Prey (搜寻猎物)
座头鲸个体除了会向着猎物(最优解)方向移动外,还会朝着随机个体位置游动,属于算法的探索阶段。该步骤实现方式如下:
(27)
式中,
为当前代数的随机个体位置。为了不与包围猎物的阶段冲突,仅当
时选择搜寻猎物。同样,A与C的定义与Encircling Prey一致。WOA流程图如图4所示。
3.4.2. IWOA改进策略
WOA算法中,鲸鱼个体选择向最优个体或随机个体更新位置的标准是
的大小。根据(22)、(23)式可以观察出,算法在迭代的过程中
的值总是偏向小于1的部分。这使得WOA在前期收敛的非常快,而中后期随着
的浮动范围逐渐收缩,算法基本处在“包围猎物”和“气泡网攻击”的策略循环中。总体来看,WOA倾向于出现过早的收敛和停滞现象。为了改善以上问题,本文引入了以下两方面的改进。
1) 优化位置更新方式
针对算法在“包围猎物”和“搜寻猎物”两方面选择概率不一的问题,通过将(21)式与(27)式更改为下列形式缓解:
(28)
(29)
式中,
、
均为当前代数的随机个体位置。在(31)式中使用
替换原本的
和
是为了在相对的加强算法在“搜寻猎物”方面侧重的同时,增强种群的多样性;而在两式中删除系数C是为了在更新位置时保证个体之间的均匀分布,从而提升算法的鲁棒性 [17]。此外,为了进一步平衡“包围猎物”和“搜寻猎物”在算法中的比重,对系数a的计算方式做出以下更改:
(30)
式中,e为自然常数。
2) 引入扰动算子
在避免陷入局部最优方面,通过在位置更新时加入扰动算子克服,方式如下:
(31)
(32)
式中,
为服从t分布t(a)的随机数;P为扰动概率因子。该式能够实现扰动随着迭代次数增加而降低,使得算法在初期适应度差的时候增强其全局搜索能力,在后期保证局部搜索能力。IWOA流程图如图5所示。
4. 仿真与分析
仿真实验平台为Matlab2019a,模型参数数值根据实际贴标机工况选取为:R = 0.1 m,E = 8 GPa,A = 1.42 mm2,V1 = 15 m/min,L = 0.8 m,Ti = 0.12 s;分数阶PID的滤波器范围下限ωb = 10−3 rad/s、上限ωh = 103 rad/s,滤波阶次N = 5;观测器增益l1、l2均取20;IWOA扰动概率因子P = 0.75。
4.1. 优化算法性能对比验证
分别利用PSO(粒子群算法)、WOA、IWOA对分数阶PID五个参数进行参数整定实验,控制对象传
递函数为
。其中,PSO计算步骤参考文献 [18],惯性因子取0.8,两个加速常
数均设为2。此外,三种优化算法种群大小均为30,维数5,最大迭代次数50。适应度随迭代次数变化对比图如图6所示。
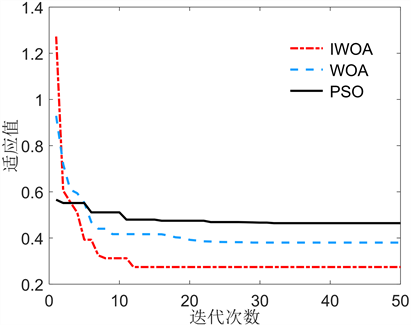
Figure 6. Comparison of fitness changes with iteration time
图6. 适应度随迭代次数变化对比
为了不失客观性,按上述条件再进行10次实验,整理后的三种算法的实验数据见表1。

Table 1. Experimental data of three algorithms
表1. 三种算法的实验数据
表1中,收敛代数的判断准则为:适应度不再变化的最早迭代数。在图6与表1中均可观察到,鲸鱼优化算法相比于粒子群算法,寻优能力更强;而IWOA在没有牺牲原算法快速收敛优势的同时,明显改善了跳出局部最优的能力,且稳定性更高。
4.2. 干扰观测器性能验证
为了观察NDO对外部干扰的跟踪能力,在系统中先添加幅值为0.2,频率为25的正弦干扰;延迟1 s后叠加终值为10的阶跃信号;在仿真时间5 s处再同时叠加终值为10的阶跃信号和幅值为1、频率15的正弦信号。复合干扰观测仿真结果如图7所示。在验证NDO对噪声的观测能力方面,为了更加直观,在系统反馈通道中加入服从N (0, 50)的随机噪声信号,噪声观测仿真结果如图8所示。在加入噪声后,系统的阶跃响应曲线在有无NDO情况下的对比图如图9所示。
在图7中,NDO对复合干扰的跟踪效果较好,仅在干扰信号拐点处会有0.07秒左右的跟踪延迟,观测误差较小。在图8、图9中,能够观察到观测器对高频噪声有良好的跟踪和补偿性能,经过测算,NDO减小了系统82.94%的震荡幅度。
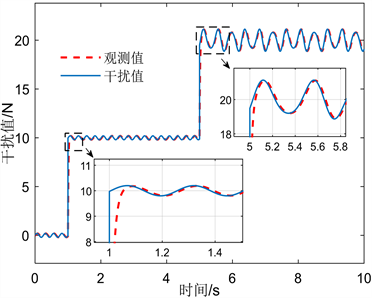 (a) 复合干扰跟踪图
(a) 复合干扰跟踪图  (b) 干扰跟踪误差
(b) 干扰跟踪误差
Figure 7. Simulation results of composite interference observation
图7. 复合干扰观测仿真结果
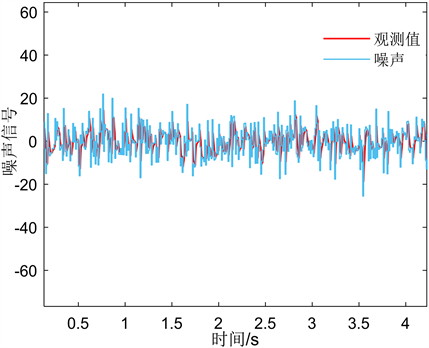
Figure 8. Noise observation simulation results
图8. 噪声观测仿真结果
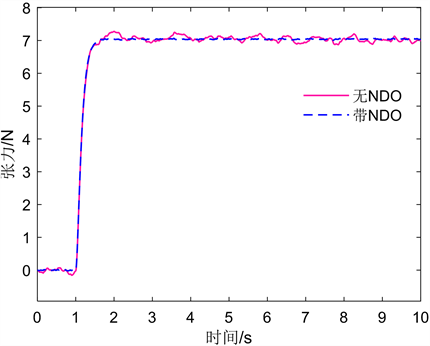
Figure 9. Comparison diagram of step response with and without NDO
图9. 有无NDO下的阶跃响应对比图
4.3. IWOA-FOPID控制器性能验证
设置目标张力为20 N,在5 s处加入大小为3 N的扰动,通过对比不同控制方式的控制效果,来验证IWOA-FOPID控制器性能。系统阶跃响应与稳态受扰变化如图10所示。不同控制方式下的性能指标见表2。
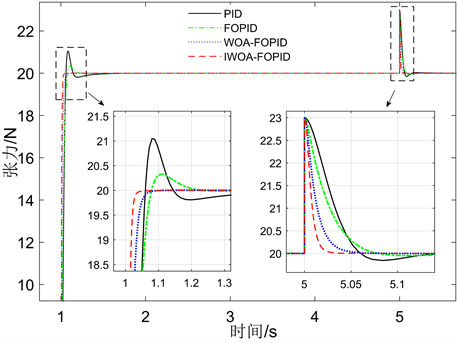
Figure 10. System step response and steady state disturbed change
图10. 系统阶跃响应与稳态受扰变化
在图10中,相比于利用优化算法整定,利用经验法整定的PID控制器和FOPID控制器,都存在不同程度的超调。FOPID控制器虽然在超调量上只有PID控制器的31.43%,但是参数过多导致在人工整定时难以完整的发挥其性能,使得其在上升时间上略有落后。利用改进鲸鱼优化算法整定的FOPID控制器基本没有超调,且调节速度快,鲁棒性强。不同控制器性能参数见表2。
Table 2. Performance parameters of different controllers
表2. 不同控制器性能参数
5. 结论
针对贴标机送标器这种具有非线性时变特点的卷绕系统,本文提出了利用改进WOA优化分数阶PID控制参数的方式,旨在克服FOPID整定难的问题,充分发挥控制器精确调节的性能。同时,引入了非线性干扰观测器对系统可能存在的各种干扰进行有效预测和补偿。实验结果显示:IWOA-FOPID + NDO控制器调节送标器张力控制系统时,具有抗扰能力强、调节迅速、超调量小、稳定性高的特点。但该控制器在实际应用中还是存在诸多限制,因此工程上如何实现将是本文下一步的探索重点。