1. 引言
作为新一代高铁交通工具,高速磁浮列车的设计速度已经达到600 km/h,大约是传统高铁的两倍。相比于传统高铁 [1] [2] [3],不同的推进方式使磁悬浮列车具有更快的运行速度,更低的维护费用成本和更强的环境适应力 [4]。中国、德国、日本、韩国和美国等国家都对磁悬浮列车技术有一定发展。根据悬浮机理的不同,磁悬浮技术可以分为电磁悬浮技术(electromagnetic suspension, EMS)和电动悬浮技术(electrodynamic suspension, EDS)两种 [5]。电磁悬浮技术通过在车体和导轨下方布置悬浮电磁铁,然后对其通电进而产生电场来抬起列车,并通过直线电机来牵引列车运行。电动悬浮技术则通过在车底布置超导线圈或者永磁体,然后在轨道上布置悬浮线圈。当列车在轨道上以一定速度运行时,由于超导线圈或永磁体与悬浮线圈的相互作用会产生向上的升力,进而抬起列车,最后依靠直线电机来牵引列车。因此电磁悬浮技术列车与轨道的间距会小于电动悬浮技术列车,而且电动悬浮技术列车必须在一定的运行速度下才会被抬起。
磁悬浮列车在带来了更高的速度的同时,其高速运行带来的相关空气动力学问题也成为迫切需要解决的实际工程问题 [6]。当列车在空气中高速行驶时,其空气动力学性能(如气动阻力、升力等)与其空气动力学形状密切相关 [7]。已有研究表明,列车的流线型外形对其空气动力学效应有重要影响,增加流线型外形的长度是减少火车空气动力阻力的有效方法之一 [8]。与传统高铁将列车减阻作为优化目标不同 [9],剧烈的气动升力是限制磁悬浮列车发展的关键问题。为此,丁叁叁等 [10] 研究了五编组高速磁悬浮列车的升力分布规律及其影响因素,提出可以通过控制列车底部与轨道间的气流来调节列车的升力。除此之外,列车交会引起的动态效应更是影响其安全运行的重要因素。倪菲等人 [11] 的研究表明,当列车彼此通过时,压力波动最大的部位位于车辆的最宽处。黄莎等 [12] 分析了运行速度为430 km/h的磁悬浮列车交会时的瞬态压力分布和流场分布,并提出列车交会时列车外侧压力时内侧压力两倍,此外通过对列车风的研究,为磁悬浮的安全站距提出了建议值。还有部分研究聚焦于列车在复杂条件下的气动力效应 [13] [14] [15],以及压力波 [16] [17] 和稳定性 [18] [19] 研究。为进一步分析磁悬浮列车在运行过程中其气动力的分布与变化情况,本文采用滑动网格方法研究了磁悬浮列车在以600 km/h的速度等速交会时的气动力变化和分布情况。
2. 数值计算方法
2.1. 几何模型
本文的列车模型采用的是上海磁悬浮列车示范运营线运行的三编组TR08型列车。如图1所示,为提高计算效率,本文对列车模型的车窗、风挡和磁铁均进行了简化,仅保留了车体的几何外形。列车高度为3.9 m,作为本文中列车的特征长度H,宽约为0.9 H,头车(car1)和尾车(car3)长为6.9 H,中车(car2)长6.2 H,列车总长20 H。为进一步分析列车气动力的分布,列车被分为上(upper)、下(lower)两部分,其中下部分(lower)包围着轨道。

Figure 1. Geometrical description of maglev model
图1. 磁浮列车几何模型
2.2. 计算域及边界条件
如图2所示,两辆磁悬浮列车以600 km/h的速度等速相向行驶。整个计算域分成了V-IN-P、V-IN-N和OUTER三部分。其中V-IN-P包含的列车沿X轴正向行驶,V-IN-N包含的列车沿X轴负向行驶,OUTER是整个外部计算流场。两列车车头的初始距离设置为728 m以保证列车在稳定行驶和交会前其流场得到了充分的发展。OUTER部分是一个总长1124 m,半径为25 m的半圆柱,圆柱两个端面和侧面的边界条件设置为Pressure-outlet。地面和轨道设置为Wall边界。在V-IN-P和V-IN-N与OUTER的交界面存在了相对运动和数据交换,因此设置为Interface边界条件。两轨道间距离为6 m。采用SlidingMesh方法定义网格运动并采用用户自定义函数(user-defined function, UDF)定义磁浮列车的运动。列车的速度包含平滑启动部分和匀速行驶部分。
在距离列车较远处的部分采用结构网格而在距离列车较近处使用非结构网格以保证计算的效率与精确性。为了验证网格的独立性,本文设置了具有7,891,167个网格的粗网格(coarse)以及具有13,280,011个网格的细网格(fine)两套网格。图3(a)显示了两套网格在列车交会时中车上半部分的气动升力的差异。两曲线的变化趋势完全相同,仅在曲线峰值处有所差异。列车交会前两套网格的数值误差仅有0.01。此外,如图3(b)所示,对包裹轨道的磁浮列车下部分的网格进行了加密。
2.3. 求解设置
由于磁悬浮列车的速度为600 km/h,是典型的可压缩流动。本文采用基于格心格式的有限体积法求解三维非定常可压缩雷诺平均N-S方程,湍流模型采用二方程k-ε模型,采用SIMPLE方法求解压力泊松方程,二阶迎风格式离散对流项,一阶隐式方法求解非定常项。求解过程中,物理迭代步长设置为0.004 s,内迭代步设置为20,并使用用户定义函数定义列车速度和监测列车气动力矩的瞬时数据。

Figure 2. Computational domain and interface definition
图2. 计算域与边界条件设置
 (a)
(a)  (b)
(b)
Figure 3. Computational mesh and independence verification
图3. 计算网格与独立性验证
2.4. 有效性验证
为验证此次数值模拟的有效性,本文对比了李明水在2003年进行的实验 [20]。其实验中设置了5个监测点来测量TR08型磁浮列车等速交会时的列车表面压力,轨道线间距为5.1 m,速度为500 km/h。他们提供了多次实验的压力均值并对列车风进行了测量。本文对比了其中一个监测点的压力特征值,如表1所示。ΔP_L是压力波头波的幅值,ΔP_T是压力波尾波的幅值,pass_P是头波和尾波之间的列车压力,其相对误差分别为0.016,0.038和0.009,因此,此次计算结果可以正确反映列车交会过程中的气动力变化。
3. 结果与分析
3.1. 列车交会气动力时均分布
为了体现结果的一般性,本文采用无量纲形式的气动力系数表示列车受到的气动载荷,气体方程及说明如下:

Table 1. Comparisons of the characteristic values between experiment and numerical simulation
表1. 实验结果与数值结果数据对比
气动阻力系数
气动升力系数
气动侧向力系数
式中,
是气动阻力;
是气动升力;
是气动侧向力;ρ = 1.225 kg/m3为空气密度;V = 600 km/h为列车运行速度;S = 11.864 m2为车体特征面积。
图4展示了两辆磁悬浮列车以速度600 km/h交会时,头车(car1)、中车(car2)、尾车(car3)的各气动力系数随时间变化曲线。当列车在双线轨道平稳运行时,由于列车车型和流场的对称性,各车厢的侧向力系数均接近于零,而阻力系数和升力系数则在各车表现出不同的分布情况。对于头车而言,其气动阻力系数约为0.11 (图表中正负号仅表示方向),气动升力系数约为0.10,二者相差不大。但是与较为平稳的气动阻力不同,头车的气动升力具有明显振荡性和不稳定性,其振荡范围为0.06~0.25,振荡幅值约为0.2,振动强度剧烈;中车所受阻力要远小于头车,其阻力系数略小于0.4,约为头车阻力系数的1/3,与头车不同的,中车所受升力较小,升力系数仅保持在0.1附近,但仍表现出明显的振荡性;尾车所受气动力最为恶劣,其阻力系数约为0.15,而升力系数已经达到0.6左右,所受升力十分剧烈。
列车以600 km/h的速度相向行驶时,在2.37 s,列车相遇,在2.84 s,列车分离。但是由于列车头部对前方空气的压缩效应,在两车真正相遇之前,空气的压力波已经作用于列车车体,如图5(a),引起列车气动力的变化。下面以头车为例,详细分析列车交会期间作用在各节车厢上的气动力变化。图4(a)展示了列车交会期间作用在头车上的气动力变化曲线。通过观察发现,由于列车前高压力区的存在,2.33 s开始,头车所受阻力、升力和侧向力就开始缓慢增加,侧向力方向为将列车退离轨道中线;2.36 s左右,
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 4. Curve: aerodynamic force on each carriage
图4. 各车气动力变化曲线
 (a)
(a)  (b)
(b)
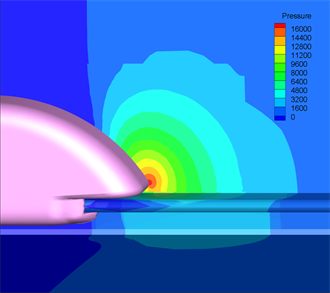
Figure 5. Pressure contour around car1 and car3
图5. 头车(car1)和尾车(car3)附近压力云图
头车所受阻力达到第一个峰值,之后开始减小,而头车升力和侧向力一直增大;2.37 s两车相遇时,头车升力和侧向力达到最大值,而阻力达到最小值,可以推断在列车前方形成的强压缩区域范围约为5~10 m;列车相遇后,由于列车间空气流动剧烈,压力变小,列车升力变小并产生负值,头车侧向力迅速减小并逐渐变为将列车推向两轨道中线方向,并在正向行驶和反向行驶的两辆头车首尾相离时,即2.45 s左右,负升力和侧向力均达到最大值,之后头车气动力趋于稳定。2.59 s,正向行驶的头车到达反向行驶的尾车的车尾负压区,其阻力减小至最小值,之后开始增大;头车升力不断减小,将列车推向两轨道中线的侧向力持续增大;2.60 s,两列车开始首尾分离,头车所受阻力和侧向力均达到最大值,升力达到最小值;之后头车所受阻力逐渐恢复至明线运行状态,在反向行驶列车尾部高压区的作用下,如图5(b),头车所受侧向力逐渐由将列车推向轨道中线转为将列车推离轨道中线,并在2.68 s达到峰值,最后逐渐恢复至明线运行状态。
中车和尾车在交会过程中的气动力变化与头车分析方式大致相同,在此不再赘述。值得注意的是,列车交会对中间车阻力几乎不产生实质性影响。结合头车气动阻力的变化过程,可以得出引起列车阻力变化的主要因素是列车头部和尾部在运行过程中造成低压区和高压区,与已有文献提出的压差阻力是列车阻力的主要来源相一致。列车交会将会对列车侧向力和升力产生剧烈影响,对于头车和中车而言,交会过程中可能会出现负升力;尾车所受升力巨大,列车交会对其影响也十分明显,但不会出现负升力现象。此外,对于尾车而言,气动阻力的变化滞后于气动升力变化,与头车气动阻力的变化先于气动升力的变化相反。
3.2. 列车气动升力空间分布
如上文所述,磁悬浮列车在行驶过程中,其气动升力表现出明显的振荡性、不稳定性,为进一步分析其不稳定性来源,本文将各节车分为包含列车车厢的上半部分(upper)和包围轨道磁铁的下半部分(lower),如图6所示,上半部分气动升力系数(蓝色线)分别为CL_U_car1、CL_U_car2、CL_U_car3,下半部分气动升力系数(红色线)分别为CL_L_car1、CL_L_car2、CL_L_car3,总升力系数(黑色线)分别为CL_car1、CL_car2、CL_car3。从图6中可以看出,列车气动升力的振荡性主要来源于车体下半部所受气动升力,即图中的红色曲线,而列车上半部分所受气动力较为稳定,即图中的蓝线,且升力系数绝对值均大于下半部分的升力系数。不同车厢的气动升力分布也不同。平稳运行时,对于头车而言,列车下半部升力表现为负值,气动升力系数约为−0.35,其原因是列车速度远大于列车与轨道间隙的空气速度,在头车底部形成负压区,迫使车体接近轨道;而列车上半部则表现为向上的升力,其升力系数虽然较大,约为0.45,但由于上、下两部分气动升力的负耦合作用,头车的整车气动升力较小,升力系数保持在0.1附近;中车的上、下两部分所受气动升力均较小,但是其下半部分气动升力的不稳定性仍旧明显;尾车的上半部分所受气动升力略大于头车的上半部分,升力系数约为0.5,其下半部分所受气动升力的升力系数约为0.1,但由于上、下两部分的正向耦合作用,导致尾车所受气动升力明显,升力系数约为0.6。此外,列车交会过程中,列车上部和列车下部所受的气动升力变化趋势相反,如图6中红线和蓝线所示;整节车的气动升力变化与下半部列车气动升力变化趋势相同,如图6中红线和黑线所示。表2列出了交会过程中列车各部分升力系数的变化幅值,从中可以看出,头波的变化幅值要大于尾波,且头车和尾车下部分的升力系数变化幅值约为上部分的2倍,中车下部分升力系数则约为上部分的1.5倍,可见列车交会过程对列车下半部的气动升力影响要明显大于对上半部的气动升力的影响。
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 6. Curves: Lift coefficient of different part of each carriage
图6. 各车厢不同部分气动升力分布时间曲线图
Table 2. The amplitude of the lift coefficient of each part of the train when the train passing by each other
表2. 交会过程中列车各部分升力系数变化幅值
4. 结论
本文使用Sliding Mesh方法对以600 km/h速度行驶的磁悬浮列车等速交会时的气动力进行了研究,详细分析了列车交会过程中作用在车体上的气动力时均分布,并通过将列车模型分为上下两部分进一步分析了列车气动升力不稳定性的振动来源。具体结论如下:
1. 在磁悬浮列车明线运行过程中,气动升力是影响列车稳定运行的主要因素。头车受到的气动阻力和气动升力在数值上十分接近,但是气动升力具有强烈的振荡性,升力系数的振荡幅值约为0.2;中车受到的气动阻力仅约为头车的1/3,气动升力系数约为0.1,但是仍表现出明显的振荡性;尾车受到的气动阻力略大于头车,但是受到的气动升力最为剧烈,升力系数达到0.6左右,由此可以推断TR08型磁悬浮列车不适合在600 km/h的速度下行驶。
2. 磁悬浮列车交会过程中,气动阻力变化与气动升力和侧向力的变化并不同时发生,气动阻力的变化时间较短,且对于头车而言,气动阻力的变化提前于气动升力和侧向力的变化;对于尾车而言,气动阻力的变化滞后于气动升力和侧向力的变化。
3. 磁悬浮列车气动升力的振荡性主要来源于列车底部,列车上半部气动升力系数曲线平滑,下半部气动升力曲线震荡明显。明线运行过程中,头车上半部的气动升力为正值,下半部的气动升力为负值,二者成反向耦合作用;中车上下两部分所受气动升力较小,成反向耦合作用;尾车上部分和下部分所受升力均为正值,在二者的正向耦合作用下,尾车所受气动升力最为剧烈。
4. 列车交会时对列车下半部分的气动升力的影响大于列车上半部分,列车下半部的波动幅值大于上半部,整车气动升力系数波动曲线与列车下半部气动升力系数波动曲线的变化趋势相同。
基金项目
此项研究受到国家重点研发计划(2017YFB1201304)和中国科学院信息化专项(XXH13506-204)的资助。
NOTES
*第一作者。
#通讯作者。