1. 前言
人类会对自然界中的各种资源进行开采,如对动物进行捕获等等,因此,研究具有捕获的种群生态系统的动力学行为就变得非常重要。Gopalsamy和Weng [1] 受控制论影响,以人类的捕获作为控制变量,首次提出单种群反馈控制模型
这里n表示种群的密度,u表示反馈控制变量。在该模型中,作者探讨了正平衡点的全局稳定性以及分支现象等等。其后,学者们提出了各种各样的反馈控制生态种群模型( [1] - [7] 以及所引文献),并在模型的稳定性、绝灭性和持久性等方面进行了系统研究。丁孝全和程述汉 [3] 提出了如下单种群阶段结构反馈控制模型
作者证得模型的边界平衡点E0是恒为不稳定的;对所有的
,E都是局部稳定的,此外,如果
,则正平衡点E是全局渐近稳定的。
在此基础上,杨英钟 [4] 认为非自治情形更为符合实际,由此提出了如下模型:
(1)
作者在假设
都是正的连续的
周期函数下,并借助重合度定理,证明了上述系统至少存在一个T-周期正解。
众所周知,一般的非自治系统更为符合实际,而对这类系统,我们不可能探讨系统的周期解,系统的持久性变得非常重要,这意味着种群能长久持续生存。本文中,对于上述模型(1),我们做出如下假设:
(1) 对于任一有正上下界的连续函数
,本文恒设:
(2) 系统(1)满足具有如下初值条件:
(3) 系统(1)的系数满足条件:
(H)
有正的上下界的连续函数。
2. 持久性
本节我们将给出一组保证系统(2.1)持久的充分性条件。
引理2.1. 系统(1)的第一个方程等价于方程
(2)
证明 方程(2)两边关于t求导,有
(3)
引理证毕。
定理2.1. 假设(H)成立,进一步假设
(4)
成立,那么系统(1)是持久的,其中M3由(8)所定义。
注记2.1. 由于M3是由后文所定义,条件(4)看上去很简洁,但却并不直观。在将M3和M2代入(4)后,我们可以得到如下推论。
推论2.1. 假设(H)成立,进一步假设
(5)
成立,那么系统(1)是持久的。
注记2.2. 一个非常有趣的事实:假设系统(2.1)的系数都是常数,则条件(5)等价于
(6)
这一条件刚好就是丁孝全和程述汉 [3] 一文中保证系统正平衡点全局稳定的充分性条件。
定理2.1的证明将由以下两个定理来完成。
定理2.2. 设
为系统(1)的任一正解,则有:
(7)
其中:
(8)
证明。设
为系统(1)的任一正解,由系统(1)的第二个方程可知:
(9)
由此可知:
(10)
对任给的足够小的正数
,由(10)可知存在
,当
时,有
(11)
当
时,由系统(1)的第三个方程有
(12)
由此可知有
(13)
注意到
是任意的足够小的正数,上式中令
,可只有
(14)
由引理2.1可知有
(15)
(15)结合(11)可知当
时,有
(16)
注意到
是任意的足够小的正数,上式中令
,那么有
(17)
定理2.2证毕。
定理2.3. 设
为系统(1)的任一正解,假设(H)和(4)成立,则有
(18)
其中
(19)
证明。设
为系统(1)的任一正解,由定理条件
可知对足够小的正数
,有
(20)
成立。由(14)可知对满足(20)的充分小的正数
,存在充分大的
,当
时,有
(21)
当
时,由系统(1)的第二个方程有
(22)
由此可知
(23)
注意到
是任意小的正数,在上式中令
立即可得
(24)
对任给的足够小的正数
(不妨设
),由(24)可知存在
,当
时,有
(25)
对于系统(1)的第三个方程,当
时,有
(26)
由此可知,
(27)
注意到
是任意的足够小的正数,上式中令
,可知有
(28)
由引理2.1可知有
(29)
(15)结合(25)可知当
时,有
(30)
注意到
是任意的足够小的正数,上式中令
,那么有
(31)
定理2.3证毕。
定理2.1的证明. 定理2.1是定理2.2和2.3的直接推论,证毕。
3. 数值模拟
杨英钟在文献 [4] 中探讨了模型(1)的周期正解的存在性,但是作者并没有给出数值模拟以表明结果的可行性,我们这里借助matlab给出例子,以表明我们结果的可行性。
例3.1. 考虑如下例子
(32)
这里,相应于模型(1),我们取
(33)
计算可知
(34)
进而有
(35)
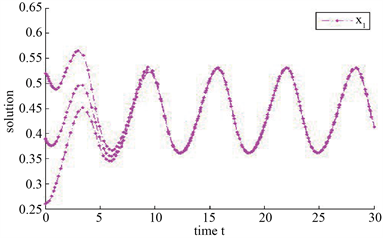
Figure 1. Dynamic behaviors of the system (32) with x1(0) = 0.26, 0.39, 0.52
图1. 系统(32)中x1(0) = 0.26,0.39,0.52时的动力学行为
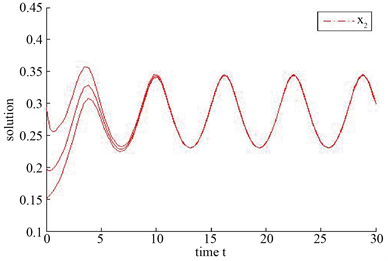
Figure 2. Dynamic behaviors of the system (32) with x2(0) = 0.15, 0.2, 0.3
图2. 系统(32)中x2(0) = 0.15,0.2,0.3时的动力学行为
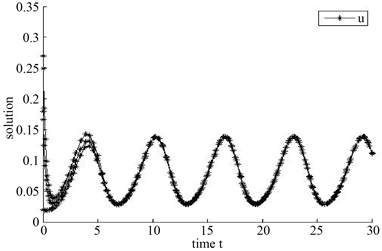
Figure 3. Dynamic behaviors of the system (32) with y(0) = 0.02, 0.18, 0.27
图3. 系统(32)中y(0) = 0.02,0.18,0.27时的动力学行为
成立,由推论2.1可知系统(32)是持久的,此外,数值模拟(图1~3)表明我们的结果是成立的,由杨英钟一文可知系统(32)至少存在一个正周期解。