1. 引言
郑哲敏 [1] 最早研究了单个弹性悬臂梁与一侧液体的相互作用问题;周叮 [2] 研究了单个弹性悬臂梁与两液体的相互作用问题;李遇春等 [3] 研究了双悬臂梁-流体耦联结构的自由振动问题,给出了双悬臂梁–液体耦联结构湿模态频率及振型函数的理论解答,研究了梁与液体、梁与梁之间湿模态的相互作用对梁模态的影响。
多悬臂梁与液体耦联系统中,梁与液体会发生相互作用,当梁间的间距较小时,梁与梁也会发生相互作用,液体充当了梁与梁相互作用的(弱)耦合体,因此梁与梁之间的耦联振动必然存在拍振现象,而文献 [3] 并未对相应的拍振进行研究。拍振广泛存在于物理、音乐和工程结构中。拍振 [4] 是由多个谐振动的叠加产生,且谐振动频率存在差值。李京颍 [5] 采用数值分析方法研究了振动的拍现象。
本文基于ANSYS有限元分析软件,模拟多悬臂梁–流体耦联系统的自由振动,并与理论结果进行比较,研究多悬臂梁–流体耦合结构中模态耦合和由此产生的拍振现象,为类似液固耦合振动研究提供参考。
2. 多悬臂梁–流体的模态耦合
2.1. 双悬悬臂梁–流体的模态耦合
根据文献 [3] ,双悬臂梁–流体结构可简化为如图1所示的系统,为简化计算,取两悬臂梁尺寸相同,仅改变右悬臂梁弹性模量。悬臂梁尺寸为:
、
,梁1的弹性模量为
,梁2的弹性模量为E2,梁材料密度与液体密度分别为
,
。以2a/h为横坐标,
为纵坐标,其中
表示第i阶的第j模态频率值,
、
表示1、2号梁在一侧无限水体时的第i阶模态频率值,其值可根据文献 [1] 计算得到,结果列于表1。对于图1的系统当
取不同值时,本文采用ANSYS软件计算得到图2和图3,关于ANSYS的模拟方法介绍可参看文献 [6] [7] 。

Table 1. The first two frequencies of cantilever beam with one side infinite water
表1. 不同弹性模量悬臂梁一侧无限水体时前两阶自振频率
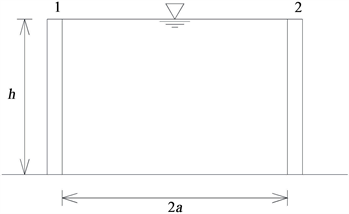
Figure 1. Double cantilever beam-fluid system
图1. 双悬臂梁–流体系统

Figure 2. Frequency variation curve of two modes of the first order
图2. 一阶两模态频率变化曲线
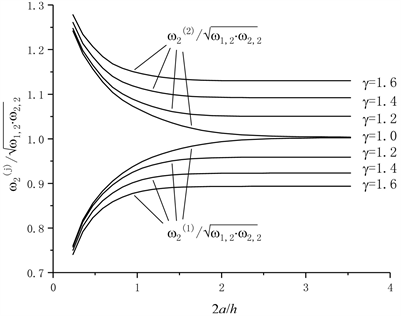
Figure 3. Frequency variation curve of two modes of the second order
图3. 二阶两模态频率变化曲线
ANSYS模拟得到的曲线与文献 [3] 中理论解法得到的结果一致,结果表明:两个梁组成的一个系统,其系统某一阶自然频率有两个,当梁间距较小时,由于液体的耦合作用,系统的两个频率发生了很大变化,说明两个梁通过液体耦合发生了相互作用;随着梁间距增大,2a/h大于3时,系统的两个频率趋于直线,与单个梁与无穷水体作用的自然频率相同,说明梁间的耦合作用趋于零。
计算结果表明ANSYS有限元计算软件可很好地模拟多悬臂梁–流体耦联系统的振动模态。
2.2. 三悬臂梁–流体结构模态影响
考虑如图4所示的三梁–流体系统,一般情况下,两区域液体的宽度和深度都会影响耦联系统的频率和振型函数。为简化计算分析,令两区域液体宽度相同,即
,液体深度与悬臂梁长度相等,即
。取三悬臂梁性质相同,为:
、
、弹性模量
。利用ANSYS软件计算该系统的一阶模态所对应的三个振型见图5所示,其对应的模态频率分别为
、
和
。改变水体长度,其它参数不变,以水体长度
为横坐标,同一阶三个湿模态频率为纵坐标,得到图6。
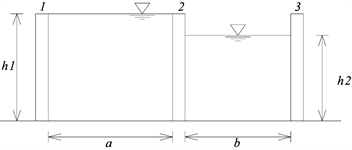
Figure 4. Triple cantilever beam-fluid system
图4. 三悬臂梁–流体系统

Figure 5. The three vibration shapes of the first mode shape for the system of triple cantilever beam and fluid
图5. 三悬臂梁–流体系统的一阶模态对应的三个振型图
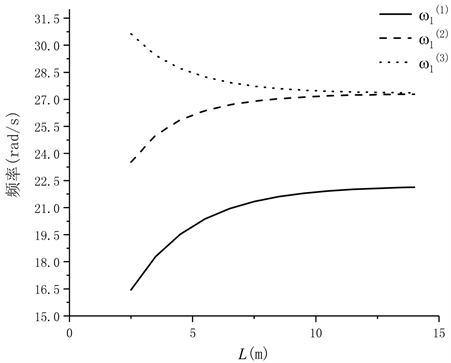
Figure 6. Variations of the three wet frequencies with liquid width L
图6. 三个湿频率随水宽L的变化曲线
由图5可知:耦联系统的第一阶模态中的悬臂梁均表现为一阶振型,其中的第一个振型(图5(a)所示)主要表现为中悬臂梁的振动,两边悬梁的振幅很小,与中悬梁的相位相反;第二个振型(图5(b)所示)二个边梁反相位同振幅振动,由于对称性,中梁保持为静止状态;第三个振型(图5(c)所示)显示了三个梁的同相位振动,由于边梁一边有水体的耦合作用,而中梁两边均有水体的耦合作用,所以边梁的振幅相对较大。
由图6可知:随着液体长度L增大,二个边梁等同于一侧受无限水体作用的悬臂梁,频率
和
趋于相等,中梁等同于两侧受无限水体作用的悬臂梁,其频率
与文献 [2] 讨论的频率一致。
3. 耦合自由振动的拍现象
多悬臂梁–流体结构是一个闭合的耦合结构,体系中的悬臂梁振动时通过对液体施加作用引起能量的迁移。当不考虑悬臂梁及液体阻尼时,结构总能量不变。在一般的情况下,体系中梁的振动是各阶模态的叠加,各梁对液体的作用不相同,梁与梁之间有能量的迁移,导致各梁的位移存在拍振现象。以下以一阶自由振动为例,研究多悬臂梁–流体结构中的拍振现象。
3.1. 双梁–液体系统拍振现象
根据文献 [1] 对双悬臂梁–流体耦联结构自由振动的理论求解结果,一般情况下左、右梁位移时程函数可表示为各阶模态的叠加:
(1)
其中
、
为常数,由初始条件决定;
、
分别为为左、右梁的第i阶振型函数,
为耦联系统第i阶频率。代入初始条件,利用振型正交性,可求解
、
,从而获得两个梁的位移时程函数。
为简化计算,将初始条件设为左梁发生一阶振型函数
的初始位移,那么结构将以一阶振动为主。在一定的计算精度内,两梁的位移函数可略去高阶模态项,简化为:
(2)
初始条件为:
;
(3)
设左、右悬臂梁性质相同,此情况在实际工程中很常见,那么振型函数有:
,
,代入解得:
(4)
根据已有的拍振理论,以上两余弦函数频率之差影响拍现象的周期;两余弦函数振幅之比影响拍现象的显著程度,即拍振的最大值与最小值 [4] 。
考虑三种情形:
、
、
,两悬臂梁性质为:
、
、
,左梁发生一阶振型初位移时(端部初位移0.4 mm),计算两梁自由端位移时程,并与ANSYS软件数值模拟结果进行比较,结果如图7所示。因为
和
相差较小,可看成角频率
的振动,以
为调制振动振幅的频率。
由图7可以看出,两个悬臂梁的振动幅值起此彼伏,能量在两个梁之间转移。由于振动理论与ANSYS计算
和
时存在误差,而随着两梁距离的增大,
与
差值将减小,因此
的误差将时会放大,理论计算与ANSYS结果拍振周期误差将放大,如图7(c)所示。
3.2. 三梁–液体系统拍振现象
同样三悬臂梁–流体结构也会发生类似拍振现象,只是各梁位移函数模态叠加项较多,方程求解较复杂。基本求解思路与双悬臂梁–流体结构相同。
取三悬臂梁性质相同,计算参数为:
、
、
,液体长度
。经ANSYS软件计算,耦联结构第一阶的三个模态频率分别为:
、
、
。以左梁发生一阶振型初位移(端部初位移0.76 mm)为初始条件,三梁-液体体系拍振现象ANSYS数值模拟结果如图8所示。
由图8所示,在本文的计算条件下,左梁与右梁振幅起此彼伏,它们通过中梁及液体的耦合发生了明显的能量转移。
4. 结论
本文利用ANSYS有限元软件研究了多悬臂梁–液体耦合体系的模态相互作用及拍振现象,结论如下:
1) 由于流固耦合作用的存在,悬臂梁之间存在相互作用,这种相互作用影响了耦联结构的湿模态,且这种影响随着梁间液体宽度的增加而减弱。

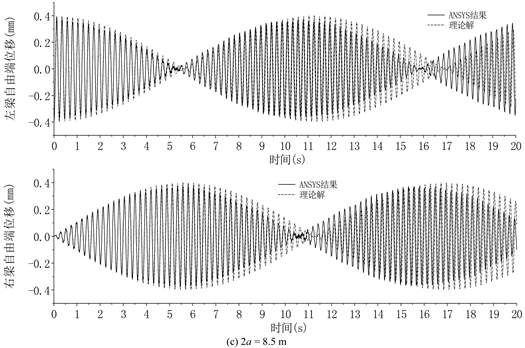
Figure 7. Beat vibration of double beam-fluid system
图7. 双梁–液体体系的拍振
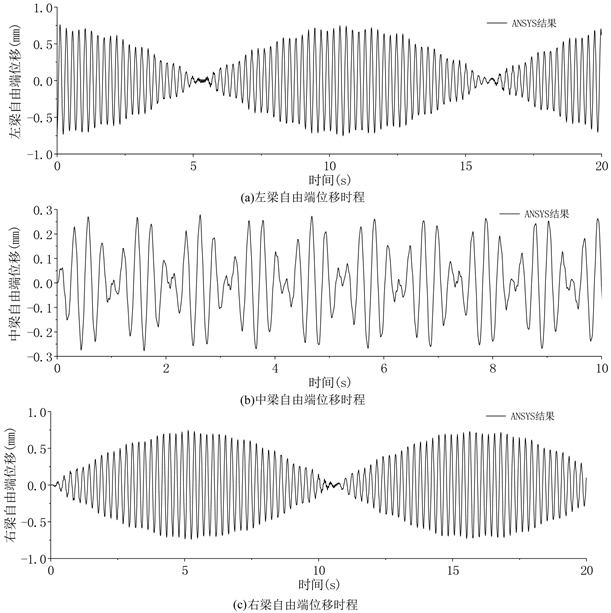
Figure 8. Beat vibration of triple beam-fluid system
图8. 三梁–液体体系的拍振
2) 多悬臂梁–流体耦联系统拍振现象是由梁间相互作用产生的模态频率差导致,由于不同模态对不同梁位移函数贡献不同,不同梁的拍现象频率及振幅一般不同。
基金项目
国家自然科学基金面上项目(51879191)资助。
NOTES
*通讯作者。