1. 引言
咀嚼是人类日常的生理活动,经过咀嚼运动,食物被碾压成细小微粒,然后在唾液的作用下形成食物团,仿生咀嚼机器人就是根据人体咀嚼系统的结构,以机械结构模拟人体咬合结构,设计机械设备,模拟人类的咀嚼过程 [1] 。
在食品检测领域,仿生咬合机器人的研制具有广泛的应用价值,能够模拟人类真实咬合方式,可以更为真实直观地检测食品力学特性 [2] [3] 。当前关于咀嚼机器人的研究,主要在于多自由度咀嚼过程理论与机构的研究,没有进入实用化的样机,而压力试验机的研究为单自由度,夹具和压力件均为金属元件,和牙齿咬食物情况区别较大 [4] [5] 。而通过牙齿模型及其固定装置测试咬合力将取得更加准确、客观的食品力学特性检测结果,本文研究了基于牙齿模型的单自由度咬合力加载与测试系统,针对牙齿与实物接触压力样机的测试,获得了多种食物的应力应变和咬断力,为食品开发和口腔牙科材料的研究提供理论参考。
2. 测试机机械结构设计
结合仿生性能设计需求和咬合参数设定,本文中咬合力测试机的机械结构总体设计方案如图1所示。
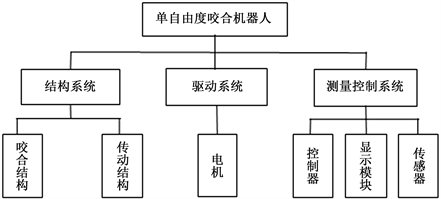
Figure 1. The overall design of the mechanical
图1. 机械结构总体设计方案
设计中单自由度咬合机器人由结构系统、驱动系统和测量控制系统三大系统组成。其中结构系统由咬合结构和传动结构组成。
驱动系统通过传动系统带动咬合结构,具体实现是步进电机通过带传动与传动齿轮相连,传动齿轮与丝杆相连,丝杆、导杆与移动横梁共同组成螺旋传动系统。在电机的驱动下,调节移动横梁的上下移动。测量控制系统由控制器、显示模块和传感器组成,进行传感器数据的采集和处理。机器人运行时,安装在咬合结构上的压力传感器将收集到的数据传送给控制中心,控制中心进行数据的处理,实时动态显示实验速度、负荷值、位移值、形变值和实验曲线。
最终制造出来的咬合力测试机的外观和内部结构如图2所示,其中1是上平板盖;2是机身;3是安全限位杆;4是移动横梁;5是上颌安装装置;6是下颌安装装置;7是机体;8是显示模块;9是底板;10是导杆;11是传动丝杆;12是轴承;13是传动齿轮;14是电机;15是电机驱动器;16是开关电源。

Figure 2. Bite force test machine appearance and internal structure
图2. 咬合力测试机外观以及内部结构
2.1. 驱动机构设计
驱动系统是整个机器人结构的动力来源,驱动系统主要由上位机、控制器、步进电机驱动器和步进电机组成,如图3所示。在上位机上有控制咬合运动的专用软件,依据咬合运动的规律,利用特定的算法,操作控制器完成对步进电机驱动器脉冲信号的发送,步进电机在脉冲信号的驱动下进行有规律的转动,从而带动咬合力测试机实现咬合动作。
根据资料显示,一个普通的成年人的最大咬合力约为46 kgf,本文设计电机加载能力为50 kgf以上,综合考虑,选用雷赛品牌型号为86HS45的两相混合式步进电机,雷赛DMA860H数字式步进电机驱动器以及力腾K120-24开关电源开关电源来组成驱动系统,电机最大功率180 w,可满足加载力要求。
2.2. 传动机构设计
本文中的传动机构运用机械传动理论知识,把动力传递给运动末端机构,也即将步进电机的转动传动为咬合结构的上下运动,整体实现原理图如图4,包括电机系统、带传动系统、螺旋传动系统和咬合装置。
电机作为动力驱动器,通过带传动将动力传递至齿轮2,齿轮2带动丝杆转动,丝杆通过螺纹副(螺旋传动)推动移动横梁的移动,移动横梁与上咬合装置相连,控制系统控制电机的正反转,实现上下移动,上咬合装置与下咬合装置从而实现了单自由度咬合运动,结构材料选用Q235 (A3钢)碳素结构钢。
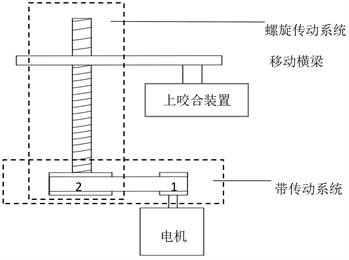
Figure 4. Overall design of transmission mechanism
图4. 传动机构整体设计
2.3. 下颌安装机构设计
文中咬合结构分为上颌安装装置和下颌安装装置。安装仿生牙齿模型时可通过下颌调节装置调节下颌模型安装位置,确保上下颌正确配合,结构简单,调节方便。下颌安装装置机械结构图如图5所示。
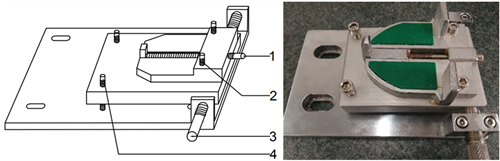
Figure 5. Lower jaw mounting device mechanical structure
图5. 下颌安装装置机械结构
其中包括下颌安装夹板、下颌安装中板、下颌安装底板、紧缩装置、一个夹紧螺栓1、两个固定螺栓2、一根调节丝杆3、两个调节螺栓4和四个固定螺栓5。可通过调节螺栓4调节中板高度,通过调节丝杆3调整中板左右位置。
3. 整体控制系统设计
图6为控制系统的硬件结构总图。以下将对运动的控制实现进行详细讨论。本文中采用的是雷赛品牌电机型号为86HS45的两相混合式步进电机,并内置DMA860H数字式步进电机驱动器。
下面对系统具体控制实现进行说明。
运动控制器向驱动器发送电机速度控制指令,根据指令要求,驱动器调节电机两端的电压方向和幅值,从而控制电机速度;编码器关联电机,将位置信号反馈给运动控制器形成闭环的控制回路。
本文采用的是力腾K120-24开关电源,通过施加24伏电压进行电机的驱动,电压的正反决定运动方向;本文中通过步进电机驱动,通过传动结构控制移动横梁的上下运动;安全限位杆对移动横梁进行移动空间的机械限位;通过安全限位杆上的限位传感器实现安全限位,当横梁运动到极限位置时触发相应的限位开关从而停止电机,同时通过对应的引脚输出电平信号。
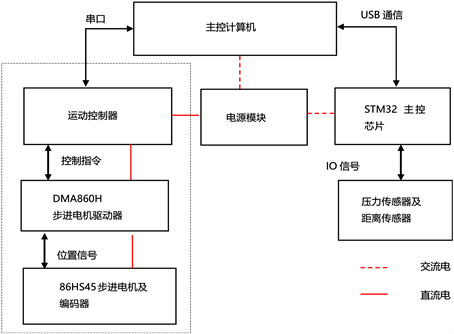
Figure 6. Measurement control system design
图6. 测量控制系统设计
4. 食物力学特性测试实验
食物质地的评价方法主要有感官评定和仪器测量两种方法。感官评定可以通过人的咀嚼来判断食品的硬度、弹性和黏性等。感官评定的步骤有:评价样品的确定、样品评价标准的确立、评价人员的筛选和培训、分析方法的选择、评价实验的实施、数据处理及解释等几个程序。
食品质地的仪器测量方法是通过仪器、设备获取食品的物理性质,例如食品力学特性,然后根据某些分析评价方法将获取的物理信号和质地参数建立联系,从而评价食品的质地。
当对物质施以作用力时,物质既有弹性又可以流动的现象称为黏弹性。食品的力学性质由化学组成、分子构造、分子内结合、分子间结合、胶体组织、分散状态等因素决定。因此,换句话说,通过测定食品的黏弹性就可以把握以上食品的状态 [6] 。
本文主要是利用单自由度仿生咀嚼机器人通过1:1牙齿模型进行食物样品咬合或咬断测试,得到食物的力学特性,食物样品具体包括饼干、火腿肠、枇杷、面包、橘子和糖果。图7为饼干力学实验结果,图8为枇杷力学测试曲线,通过曲线图可看出特征点的力,包括最大咬合力。图9和表1所示了多种食品力学测试曲线和数据,枇杷和橘子无明显弹性阶段;橘子和糖果无明显屈服现象;饼干和火腿肠的屈服极限和最大咬合力相同;枇杷、面包、橘子和糖果的最大咬合力和咬断力相同。
在咬合的初始阶段,力随形变量的增大而增大;越具有弹性性能的食品弹性阶段越显著,即 越大;不同的食品材料的力学特性存在差异性,具有流变性能和脆性的食物材料没有屈服极限;不同硬度的食品材料的最大咬合力一般不同;同种食品的屈服极限、最大咬合力和咬断力一般不会完全相同。
根据食品材料的应力-应变曲线即可分析得出不同的食品材料的力学特性,然后根据某些分析评价方法将获取的力学特性和质地参数建立联系,从而评价食品的质地。通过单自由度咬合力试验机测试,获得了食品最大咬断力,与传统质构仪和压力试验机相比,本系统采用牙齿与食物接触产生压力的方式更加真实模拟人咬断食物的过程,获得了更真实的食物咬断力。
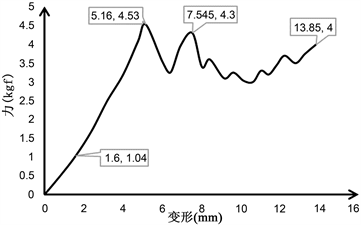
Figure 7. Bite force-shape variable curve of biscuit experiment
图7. 饼干实验咬合力–形变量曲线图
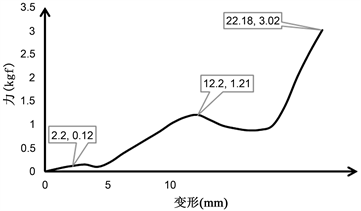
Figure 8. Bite force-shape variable curve of loquat experiment
图8. 枇杷实验咬合力–形变量曲线图

Figure 9. Bite force-shape variable curve of experimental sample
图9. 多种实验样品咬合力–形变量曲线图

Table 1. Food sample mechanical properties table
表1. 食物样品力学特性表
5. 结语
对于机械结构系统基本到达了预期的设计要求,成功研制了单自由度咬合力测试系统,通过对试验测试和应用经验,结论如下:
1) 咬合机器人的总体结构设计方案可行,功能得以实现;
2) 成功制作出了样机,对一些代表性食物进行了测试,实现了对食物咬合力学特性数据的采集与分析;
3) 与目前国内外类似产品相比,能够更真实的模拟出牙齿咬合过程;
4) 单自由度咬合力测试系统的研制成功,弥补了国内对于牙齿咬合力测定的空白,为食品的力学特性测试和医疗牙齿修复材料的开发提供了手段。
基金项目
本文获四川省科技计划项目(2017GZ0354)资助。