1. 引言
随着现如今开关电源技术的不断发展,Buck电路作为电源技术的重要组成部分,一直以来都是国内外专家学者研究的重点。为了减小变换器电流纹波和提高系统的功率密度,本文采用交错并联电路来满足要求 [1] [2] [3] 。
交错并联技术的运用必定会使电路磁性元件数量的增加,导致系统体积的增大,并且会使系统的功率密度降低。文献 [4] 采用分立电感对交错并联DC/DC变换器进行设计,使得系统的体积过大和电压电流纹波过高。文献 [5] 结合多种变换器,分析了耦合电感不同集成方式对电流脉动的影响。通过改变耦合电感的绕制方法来调整输出电流脉动和输出电压纹波。文献 [6] 给出了耦合电感用互感表征的等效电路,通过数学公式得出反向耦合时稳态等效电感增大,动态则相反减小,符合变化器低稳态纹波,动态响应快的要求。因此,在交错并联Buck电路中将分立电感合成耦合电感,不仅能够减小变换器的体积,而且在采取合适耦合系数的情况下,将会增大功率密度和减小输出电流纹波 [7] [8] 。
基于此,本文针对交错并联Buck电路,采用电压电流双闭环控制方法 [8] [9] [10] ,并在大占空比条件下设计了交错并联Buck电路的耦合电感,改进后的电路输出电压纹波变小并且具有更好的系统鲁棒性和更快的动态响应。
2. 双闭环交错并联Buck电路
2.1. 工作原理
图1所示为交错并联Buck电路拓扑结构。相对应与经典Buck电路,它是将两个半桥电路并联而成,两相开关管的驱动信号相差180˚。
电路主要工作过程如图2所示。在t0~t1阶段,开关Q1导通,Q2关断,电感L1通过D1充电,电感L2通过D2释放能量;在t1~t2阶段,开关Q1、Q2同时导通,电感L1、L2分别通过D1、D2充电;在t2~t4阶段,电路顺序重复上面两个模式,开关管Q1先关断后导通,开关管Q2保持导通状态。采用

Figure 1. Interleaved parallel buck circuit
图1. 交错并联Buck电路

Figure 2. Current curve of interleaved parallel buck circuit when D > 0.5
图2. 交错并联Buck D > 0.5电流波形
交错并联技术可以减小储能元件的体积,并且使得变换器输出的总电流纹波足够小。
2.2. 控制器设计
利用状态空间平均法求得Buck电路的交流小信号方程 [11] :
(1)
如图3所示,为Buck电路小信号电路等效模型,
为输出侧超级电容,其等效串联电阻为
,

Figure 3. Equivalent model of small signal circuit in descending pressure
图3. 降压时小信号电路等效模型
等效并联电阻由于阻值一般为兆欧级,可忽略不计。
为了方便计算,设定Buck电路中
,
,
,
,稳态值
。
依据上述所设定的值求得Buck电路占空比到电感电流的传递函数 [12] :
(2)
占空比到输出电压的传递函数:
(3)
以及电感电流到输出电压的传递函数:
(4)
Buck电路将采用电压电流双闭环控制策略对其进行闭环控制。如图4所示,电压外环将超级电容
两端电压
与参考电压
进行比较,起到稳定输出电压的作用。电流内环将通过PI调节后的电压环输出值作为电流内环的给定值
,因为此处的给定值为两相电感电流的总和,所以两个电流内环分别得到一半的给定值,起到限制电流过大和加快响应速度的作用 [13] 。
3. 交错并联Buck电路中耦合电感设计
3.1. 耦合电感设计
由图1可以发现,功率器件是由两相并联连接构成,理论上电路所消耗的功率将会是每一相电路的两倍。采用分立电感导致磁性元件的增加,从而使得电路体积变大,对于多相交错并联Buck电路而言,体积会更加大,所产生的消耗也会随之增加 [14] [15] [16] 。因此,为提高功率密度,将电感合并成耦合电感。如图5所示为耦合电感形式及其等效电路。
其中M为
、
的互感,
、
分别为电感
、
两端的电压,
、
为流过电感的电流,则得到
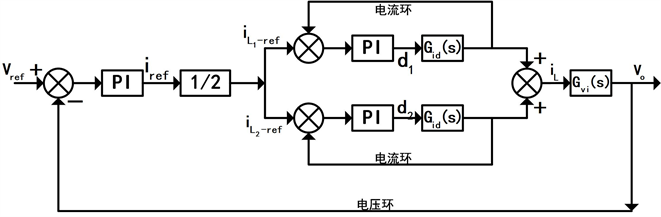
Figure 4. Control scheme of buck circuit
图4. Buck状态控制框图
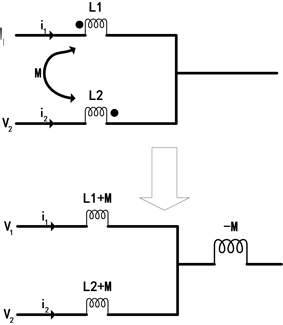
Figure 5. Curve: system result of standard experiment
图5. 标准试验系统结果曲线
如下关系式:
(5)
对于交错并联Buck电路而言,式(5)中的
和
在开关开通和关断时取得,一般只有两个取值,即
和
。耦合系数
,根据之前的假设
,代入(5)式可得到:
(6)
进一步将式(6)简化得:
(7)
式中,
为电感
的等效电感。在交错并联Buck电路中,
与
的关系会随着时间的变化而变化,因此在不同的时间段所对应的等效电感
的值也会不一样,但在一个开关周期中,电感需要遵守伏秒平衡原则,所以基于此原则可以计算出不同时段的等效电感值。
(8)
将(8)中各式代入(6)中,从而得出不同时段的等效电感为:
(9)
根据式(9)绘制出电感电流在分立电感和耦合电感的波形,图中分立电感
、
的电感电流波形用虚线表示,实线则为耦合电感下的电感电流波形。
可以看出,在D > 0.5时,一个开关周期当中,等效电感
所对应的电感电流波动最大,即波形的斜率最大。所以为了减小电感电流的纹波,只要控制等效电感
的斜率就行了。这里设
为稳态等效电感值,可令
。在图6中,
时间段内,电流
的斜率
,
的稳态电流纹波峰–峰值:
(10)
从式(10)可以看出,
取值越大,稳态电流纹波将变小。由式(9)可以得出,当耦合系数取到一定值时,会使
取到最大值。
通过电感电流的变化量
与
的比值来确定系统的动态响应,即
,其中
为占空比
发生微小变化时的取值。
由图7可知,当占空比
产生微小变化时,电感电流也会随之发生变化,在一个开关周期中,电感电流的变化量
可分为5个时间段的变化之和。
(11)
根据上式可以求得一个周期中总的电流变化量是:

Figure 6. Voltage and current waveform of coupling inductance
图6. 耦合电感的电压、电流波形

Figure 7. The waveform of a transient change
图7. 瞬态变化时的波形图
(12)
稳态条件下,电感电流的总变化量为零则有:
(13)
联合式(12)和(13),可得到:
(14)
因此得到系统的动态响应速度为:
(15)
根据式(15)可以得出等效电感
的值将会决定动态响应速度,
的值越小,响应速度越快,这里设
为动态等效电感值,可令
。
3.2. 耦合系数对交错并联Buck电路的影响
根据上述分析可知,采取不同耦合系数对系统的动稳态特性以及输出电流纹波都有很大的影响。系统的稳态等效电感值和瞬态等效电感值的关系式如下:
(16)
式中,当占空比
和耦合系数
发生变化时,
的值将会发生相应的改变。关系如图8所示。
由图可知,在占空比一定的时候,
的值越大,则系统瞬态等效电感值与稳态等效电感值越小,从而使得电路的输出电流纹波以及动态响应特性较好。当系统的耦合系数一定时,占空比在0.5左右的时候,所得到的电路性能最好。
4. 仿真结果
进一步验证上述理论分析,在Matlab/Simulink环境下进行仿真研究,电路指标为:输入侧电压
,输出侧电压
,开关频率
,计算出的电路参数为:储能电感
,滤波电容
,功率开关器选取IPB036N12N3_G型功率MOSFET。根据系统的传递函数设计电压电流双闭环控制器,在实际调整过程中对参数进行调整,最终取电压外环
,
,电流内环
,
。
图9和图10分别为交错并联Buck电路输出电感电流波形和输出电压波形,从图中明显的可以发现
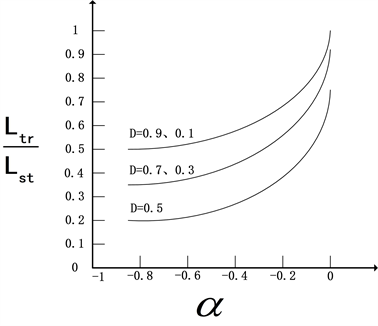
Figure 8. The relationship between coupling coefficient and circuit performance
图8. 耦合系数与电路性能的关系

Figure 9. Output inductance current waveform
图9. 输出电感电流波形
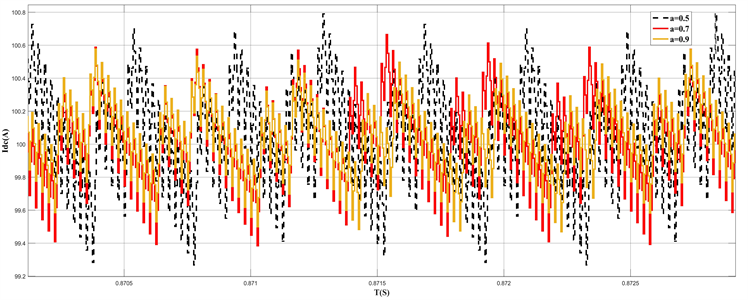
Figure 11. The current waveform under different coupling coefficients
图11. 不同耦合系数下的电流波形

Figure 12. Output voltage waveform under different coupling coefficients
图12. 不同耦合系数下的输出电压波形
耦合电感下的电感电流和输出电压纹波变小,输出电压纹波降到4%,输出电流纹波也减小到了7%。
进一步观察不同耦合系数下的电流波形,如图11所示,在耦合系数
为0.5时,系统的电流峰峰值大约为1.4 A,耦合系数
为0.7时系统的电流峰峰值达到1.2 A,耦合系数
为0.9时系统电流峰峰值小于1 A。当耦合系数为0.9时,其动态响应速度也变快了,从而提高了系统的效率。
图12中,分别比较了耦合系数
在不同取值下的输出电压波形,可以看出在
为0.9时输出电压纹波最小,为4%左右,从而验证了之前的理论分析。
5. 总结
本文针对交错并联Buck电路的小信号模型,设计了电压电流双闭环控制;进一步设计了耦合电感,给出了详细的计算方法,并分析了不同耦合系数对电路动稳态特性的影响。理论分析与仿真结果表明,电路占空比在0.5附近的电流纹波较小,当占空比大于0.5时,较大的耦合系数能够有效降低电流纹波。采用耦合电感降低了交错并联Buck电路开关器件电流应力,同时使得系统体积和输出电压纹波变小、动稳态特性提高。接下来的工作将改进控制方式,加强系统的鲁棒性,并搭建硬件电路进行实验研究。
致谢
感谢编辑和审稿人百忙之中抽空评审文章,并提出了宝贵意见。